Vous aimerez peut-être aussi
- M700V - M70 Series Instruction ManualDocument813 pagesM700V - M70 Series Instruction ManualJhon Alexander Zambrano Ospina100% (1)
- Metodo de Matlab.Document18 pagesMetodo de Matlab.JeanPaulParedesMojoneroPas encore d'évaluation
- Métodos Matriciales para ingenieros con MATLABD'EverandMétodos Matriciales para ingenieros con MATLABÉvaluation : 5 sur 5 étoiles5/5 (1)
- JuniorA ObregonTuyaDocument4 pagesJuniorA ObregonTuyajunior obregonPas encore d'évaluation
- Representacion de Funciones Singulares en MatlabDocument18 pagesRepresentacion de Funciones Singulares en Matlabescorpion1311Pas encore d'évaluation
- Análisis de Señales y Sistemas Lineales en El Dominio Del TiempoDocument8 pagesAnálisis de Señales y Sistemas Lineales en El Dominio Del TiempoThais M. Batista V.Pas encore d'évaluation
- Lab 1 - Señales y Sistemas2Document13 pagesLab 1 - Señales y Sistemas2Charlie Entrenador PokimonPas encore d'évaluation
- Lab 01 2021 SeñalesSistemas TDocument3 pagesLab 01 2021 SeñalesSistemas TAlex NúñezPas encore d'évaluation
- Laboratorio 1 Señales PDFDocument3 pagesLaboratorio 1 Señales PDFFederico PinedaPas encore d'évaluation
- Exper 4Document5 pagesExper 4Sergio Caballero BurgosPas encore d'évaluation
- Representación de Señales Periódicas Por Series de Fourier Tarea 1 Angel MagañaDocument10 pagesRepresentación de Señales Periódicas Por Series de Fourier Tarea 1 Angel MagañaÁngel de Jesús Magaña QuintalPas encore d'évaluation
- Practica 0Document11 pagesPractica 0Rodrigo MuñozPas encore d'évaluation
- Laboratorio 1 de Señales UFPSDocument20 pagesLaboratorio 1 de Señales UFPSWilfran SebastianPas encore d'évaluation
- Laboratorio 1 Señales MATLABv 1Document19 pagesLaboratorio 1 Señales MATLABv 1G.A. Juan Sebastian Bermúdez VélezPas encore d'évaluation
- Grupo 8 TF IMCDocument10 pagesGrupo 8 TF IMCKevin RamónPas encore d'évaluation
- Series de Fourier Exponenciales Angel MagañaDocument10 pagesSeries de Fourier Exponenciales Angel MagañaÁngel de Jesús Magaña QuintalPas encore d'évaluation
- Lab1 PROPIEDADES DE LAS SEÑALESDocument12 pagesLab1 PROPIEDADES DE LAS SEÑALESRogel AlfaroPas encore d'évaluation
- Señales en MatlabDocument13 pagesSeñales en MatlabserfaryPas encore d'évaluation
- Informe 1Document32 pagesInforme 1CarlaMuñozPescoránPas encore d'évaluation
- Tarea1 203042 80Document25 pagesTarea1 203042 80jose paezPas encore d'évaluation
- Laboratorio - Series de FourierDocument14 pagesLaboratorio - Series de FourierJavier Rodriguez CruzPas encore d'évaluation
- Lab 01 SeñalesSistemas PDFDocument4 pagesLab 01 SeñalesSistemas PDF'Jph Flores BmxPas encore d'évaluation
- Practica 1Document12 pagesPractica 1Anthony AguilarPas encore d'évaluation
- Lab1p1 2021Document4 pagesLab1p1 2021Danilo Andre LuquePas encore d'évaluation
- Lab PDS Salas MinayaDocument23 pagesLab PDS Salas MinayaKevin Rada MinayaPas encore d'évaluation
- Lab7 Opera Parte2Document4 pagesLab7 Opera Parte2MARIO FERNANDO FERNaNDEZ LUDE�APas encore d'évaluation
- Primera Practica Ciii 2021Document54 pagesPrimera Practica Ciii 2021manuelPas encore d'évaluation
- Informe 6 Señales y Sistemas Ricardo Yauri MartinezDocument14 pagesInforme 6 Señales y Sistemas Ricardo Yauri MartinezEdwin Toledo0% (1)
- Practica1 2021señalesDocument9 pagesPractica1 2021señalesximenaPas encore d'évaluation
- LAB Series de FourierDocument17 pagesLAB Series de FourierJazz T.M.Pas encore d'évaluation
- Ráctica Nálisis de Ourier: Objetivo y RecomendacionesDocument10 pagesRáctica Nálisis de Ourier: Objetivo y RecomendacionesAntonioPas encore d'évaluation
- Entregable Metodos NumericosDocument18 pagesEntregable Metodos Numericoshugo berdugoPas encore d'évaluation
- Ráctica Ntroducción A Las Señales Y Los Sistemas: ObjetivoDocument13 pagesRáctica Ntroducción A Las Señales Y Los Sistemas: ObjetivoAntonioPas encore d'évaluation
- Practica N3Document13 pagesPractica N3VICTOR HERNAN QUISPE TREVEJOPas encore d'évaluation
- Tarea 1 - Señales y Sistemas Continuos y Discretos - Haiber DussanDocument20 pagesTarea 1 - Señales y Sistemas Continuos y Discretos - Haiber DussanHaiber DussanPas encore d'évaluation
- Tarea 1 Series de Fourier y Transformada de Fourier Ángel Magaña Quintal K5U ITIC T.M.Document17 pagesTarea 1 Series de Fourier y Transformada de Fourier Ángel Magaña Quintal K5U ITIC T.M.Ángel de Jesús Magaña QuintalPas encore d'évaluation
- Tipos de Señales en MatlabDocument15 pagesTipos de Señales en MatlabMarlon LastraPas encore d'évaluation
- Analisis de Sistemas Lineales Empleando Matlab V - 0.1Document10 pagesAnalisis de Sistemas Lineales Empleando Matlab V - 0.1Yuki RitoPas encore d'évaluation
- Practica No 1Document7 pagesPractica No 1Carlos Antonio A GPas encore d'évaluation
- Manual Fundam Telecom UrpDocument96 pagesManual Fundam Telecom UrpjorgellocllaPas encore d'évaluation
- LabN 1 FinalDocument35 pagesLabN 1 FinalMario SamudioPas encore d'évaluation
- Laboratorio 2-Hoja RespuestaDocument9 pagesLaboratorio 2-Hoja RespuestaDeyfer ChaverraPas encore d'évaluation
- Laboratorio Nro 1 Analisis de Senales yDocument12 pagesLaboratorio Nro 1 Analisis de Senales yDora Ines Reyes ChavezPas encore d'évaluation
- Practica 2.1Document9 pagesPractica 2.1Moreno Reyes Eduardo MartinPas encore d'évaluation
- Lab Señales 1Document6 pagesLab Señales 1ARIZA JUAN DIEGO AGUILARPas encore d'évaluation
- Practica 3 ComnDigDocument16 pagesPractica 3 ComnDigPinocho Obrayandi Negrete TellezPas encore d'évaluation
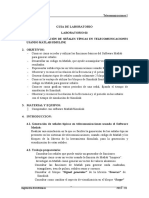
- Aplicando MATLAB en TelecomunicacionesDocument96 pagesAplicando MATLAB en TelecomunicacionesEmanuel Acosta GutierrezPas encore d'évaluation
- Lab02 - Generacion de Señales Matlab - SimulinkDocument7 pagesLab02 - Generacion de Señales Matlab - SimulinkLuis RodriguezPas encore d'évaluation
- Práctica6 AlonsoIbarraBarrios PDFDocument5 pagesPráctica6 AlonsoIbarraBarrios PDFbigorosianoPas encore d'évaluation
- Practicas PdsDocument92 pagesPracticas Pdsoleme12Pas encore d'évaluation
- Laboratorio 1 - Representación de Señales en MatlabDocument6 pagesLaboratorio 1 - Representación de Señales en MatlabsamantaPas encore d'évaluation
- Ayuda Comandos Matlab Sist ComunicacionesDocument8 pagesAyuda Comandos Matlab Sist ComunicacionesKeith PittmanPas encore d'évaluation
- Lab 3 Sistemas de Control 30092021Document9 pagesLab 3 Sistemas de Control 30092021Adalid elaprendizPas encore d'évaluation
- 1.1 - EJERCICIO - Circuito RL ParaleloDocument8 pages1.1 - EJERCICIO - Circuito RL ParaleloArmando NaranjoPas encore d'évaluation
- Laboratorio 2 SeñalesDocument9 pagesLaboratorio 2 SeñalesALEJANDRO NAVARRETE ROJASPas encore d'évaluation
- Daniel Bustios GuillenDocument13 pagesDaniel Bustios GuillenDaniel Alonzo Bustíos GuillénPas encore d'évaluation
- Usos Practicos de MatlabDocument10 pagesUsos Practicos de MatlabRotmanQuimbitaPas encore d'évaluation
- Practica 1Document14 pagesPractica 1andres zegarraPas encore d'évaluation
- Modelo de Lotka VolterraDocument15 pagesModelo de Lotka VolterraJuan Carlos LeivaPas encore d'évaluation
- Tarea Examen PrograDocument2 pagesTarea Examen PrograMotta C PauloPas encore d'évaluation
- HotelesDocument12 pagesHotelesDIANA KATHERINE OCAMPO QUINTEROPas encore d'évaluation
- EPSON PowerLite® S39Document4 pagesEPSON PowerLite® S39Support Technician Indra Colombia LtdaPas encore d'évaluation
- Scrip S FEDocument7 pagesScrip S FEJose Carlos AlvaradoPas encore d'évaluation
- Simulacion WorbookDocument133 pagesSimulacion WorbookJorge Luis HernándezPas encore d'évaluation
- Inca KolaDocument42 pagesInca KolaLalox Monzon Martinez100% (1)
- Programa Del Segundo Congreso Archivístico de Las Américas: "Los Archivos Coloniales Frente A Las Independencias"Document4 pagesPrograma Del Segundo Congreso Archivístico de Las Américas: "Los Archivos Coloniales Frente A Las Independencias"RichardPas encore d'évaluation
- Microcontroladores PIC Diseño Práctico de Aplicaci... - (PG 16 - 63)Document48 pagesMicrocontroladores PIC Diseño Práctico de Aplicaci... - (PG 16 - 63)Fulano de talPas encore d'évaluation
- Programación Dinámica DeterministaDocument19 pagesProgramación Dinámica DeterministaJean Paul PereaPas encore d'évaluation
- Metodo de Brown y GibsonDocument6 pagesMetodo de Brown y GibsonLunavaz1Pas encore d'évaluation
- La Primitiva Pasodoble de Concierto Jef PendersDocument36 pagesLa Primitiva Pasodoble de Concierto Jef PendersJoseAntonioMendezHerediaPas encore d'évaluation
- Manual EstudianteDocument2 pagesManual EstudiantesaryPas encore d'évaluation
- La - Robotica - Aplicada - A - La - Ludica Maso MasoDocument12 pagesLa - Robotica - Aplicada - A - La - Ludica Maso MasoK'rlo EscaPas encore d'évaluation
- PrioridadDocument3 pagesPrioridadanaisPas encore d'évaluation
- Word 2016 Cheat Sheet EsDocument3 pagesWord 2016 Cheat Sheet EsClaudia Elena Vega LópezPas encore d'évaluation
- Guia de AprendizajeDocument201 pagesGuia de AprendizajeJose Luis Ku100% (4)
- Matlab SignosDocument7 pagesMatlab SignosJulian GomezPas encore d'évaluation
- Manual de Usuario BibliometroDocument8 pagesManual de Usuario BibliometroMarco Antonio Salinas HerreraPas encore d'évaluation
- Manual BizagiDocument94 pagesManual BizagiLeidy Johanna Cardenas SolanoPas encore d'évaluation
- Ultimo MonitoreoDocument4 pagesUltimo MonitoreoJesse ClarkPas encore d'évaluation
- Guia de Instalacion de CactiDocument9 pagesGuia de Instalacion de CactiSteven VargasPas encore d'évaluation
- Codigo de Seguidor de Lineas - ArduinoDocument4 pagesCodigo de Seguidor de Lineas - ArduinoFelipe Con FPas encore d'évaluation
- Guia 1Document3 pagesGuia 1Giovanny AldásPas encore d'évaluation
- Quiz Semana 3Document8 pagesQuiz Semana 3AURA PATRICIA MOLANO VEGAPas encore d'évaluation
- Cartilla SSOMA 2019-015 Trabajos en AlturaDocument2 pagesCartilla SSOMA 2019-015 Trabajos en AlturaFrancis Figueroa TorresPas encore d'évaluation
- Abe 2023Document4 pagesAbe 2023EDGARD WILSON BUSTILLOS ADRIANZENPas encore d'évaluation
- EjercicioDocument1 pageEjerciciofermadPas encore d'évaluation
- PmodDocument6 pagesPmodEdu OliverPas encore d'évaluation