Académique Documents
Professionnel Documents
Culture Documents
Cirkuitos Ejercicicios Easy
Transféré par
Alexander GallardoTitre original
Copyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Cirkuitos Ejercicicios Easy
Transféré par
Alexander GallardoDroits d'auteur :
Formats disponibles
UNIVERSIDAD NACIONAL DEL SANTA
FACULTAD DE INGENIERÍA
DEPARTAMENTO ACADÉMICO DE INGENIERÍA EN ENERGÍA Y FÍSICA
ASIGNATURA: CIRCUITOS ELÉCTRICOS Docente: Ing. Fidel Ríos Noriega
ESCUELA PROFESIONAL DE INGENIERÍA MECÁNICA
LABORATORIO 4 – EJERCICIOS PROPUESTOS
DATOS INFORMATIVOS:
Facultad : Ingeniería
Escuela Profesional : Ingeniería Mecánica
Curso : Circuitos Eléctricos
Ciclo De Estudios : VII
Semestre Académico : 2019
Docente : Ing. Fidel Ríos Noriega
DATOS DEL GRUPO:
Apellidos y Nombres: Caballero Olivares Ronald
Gallardo Jacinto Alexander
Códigos: 0201616049
0201616047
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
b
1. Hallar las tensiones en los nodos a, b, c y d (fig. 1)
FIG 1
c R11
FIG 2
1.0kΩ
R1 R2 R3 R9
10Ω 5Ω 4Ω
R14
5kΩ
2kΩ
R4 R5 E4 V2 E5 I1
V3
b V1
d 20Ω 8Ω
R27
R8 R7 R6 10 V 20 V
4Ω 16Ω 8Ω I1 E6 R10 2kΩ
4mA 12 V 10kΩ
R30
E1 E2
30 V 45 V 1.0kΩ
a
R17
En el nodo c: a
V13 2Ω V11
𝑉𝑑 − 𝑉𝑐 𝑉𝑐 − 𝑉𝑏 𝑉𝑐 I3 2A 12 V R18 R19 12 V
= + → 0 = −5𝑉𝑏 + 11𝑉𝑐 − 2𝑉𝑑 … (𝐴) 6Ω 6Ω
10 4 V9 5 R15 R16
I5
a b R20
En el nodo b: 18 V
8Ω 8Ω R21
6Ω
R22
2Ω 2Ω
8A
𝑉𝑎 + 45 − 𝑉𝑏 𝑉𝑐 − 𝑉𝑏 3 A𝑉𝑏 I4
V12
+ = → −45 = 𝑉𝑎 − 4𝑉𝑏 + 2𝑉𝑐 … (𝐵)
8 4 8V10 R31
12 V
b
En el nodo a: 10 V
5Ω
𝑉𝑎 − 30 − 𝑉𝑑 𝑉𝑎 𝑉𝑎 + 45 − 𝑉
FIG 4
𝑏
FIG 5 F
+ + = 0 → 30 = 7𝑉𝑎 − 2𝑉𝑏 − 4𝑉𝑑 … (𝐶)
4 16 8
En el nodo d:
𝑉𝑎 − 30 − 𝑉𝑑 𝑉𝑑 𝑉𝑑 − 𝑉𝑐
= + → 150 = 5𝑉𝑎 + 2𝑉𝑐 − 7𝑉𝑑 … (𝐷)
4 20 10
Formado una matriz con las ecuaciones (A), (B), (C) y (D)
0 −5 11 −2 𝑉𝑎 0 −10.14
𝑉𝑏 −45
[ 1 −4 2 0 ][ ] = [ ] → 𝐴𝑉 = 𝐵 → 𝑉 = 𝐴 𝐵 = [ 7.847 ]
−1
7 −2 0 −4 𝑉𝑐 30 −1.736
5 0 2 −7 𝑉𝑑 150 −29.17
Donde:
𝑉𝑎 = −10.14𝑉
𝑉𝑏 = 7.847𝑉
𝑉𝑐 = −1.736𝑉
𝑉𝑑 = −29.17𝑉
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
b Circuitos Eléctricos
2. Obtener las tensiones de los nodos V1, V2 y V3 en el circuito (fig. 2).
FIG 1
c R11 FIG 3 R12
FIG 2
1.0kΩ E7 1.0kΩ
R1 R2 R3 R9 100 V
10Ω 5Ω 4Ω
R14 R13
5kΩ
2kΩ 2kΩ
R4 R5 E4 V2 E5 I1 I2
V3
b V1
d 20Ω 8Ω
R27 R28
R8 R7 R6 10 V 20 V
4Ω 16Ω 8Ω I1 E6 R10 2kΩ 2kΩ
V1
4mA 12 V 10kΩ 100 V
R30 R29
E1 E2
30 V 45 V 1.0kΩ 1.0kΩ
a
R17
a
V13 2Ω V11
I3 2A 12 V R18 R19 12 V
6Ω 6Ω
R26 R24
V9
R15 R16 10Ω 20Ω
I5
a b R20
8Ω 8Ω R21 R22
18 V 6Ω
2Ω 2Ω
8A a b
3A I4
V12 R25 R23
12 V 50Ω 2Ω
V10
R31
DESARROLLO: b
5Ω
10 V
V2 = 12V
FIG 4 FIG 5 FIG 6
Aplicando LTK en las mallas 1 y 2, obtenemos:
Malla 1:
−V1 − 10 + 12 = 0
V1 = 2V
Malla2:
−12 + 20 + V3 = 0
V3 = −8V
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
3. Calcular el valor de las corrientes I1 e I2 en las redes de excitaciones simétricas de la fig. 3.
1
c R11 FIG 3 R12
FIG 2
1.0kΩ E7 1.0kΩ
R2 R3 R9 100 V
5Ω 4Ω
R14 R13
5kΩ
2kΩ 2kΩ
R5 E4 V2 E5 I1 I2
V3
b V1
8Ω
R27 R28
R7 R6 10 V 20 V
16Ω 8Ω I1 E6 R10 2kΩ 2kΩ
V1
4mA 12 V 10kΩ 100 V
R30 R29
E2
45 V 1.0kΩ 1.0kΩ
R17
Aplicando2Ω
Superposición:
a
V13 V11
2A E121=0
V R18 R19 12 V
6Ω 6Ω
R26 R24
15 R16 10Ω 20Ω
I5
b R20
8Ω R21 R22
6Ω
2Ω 2Ω
8A a b
I4
V12 R25 R23
12 V 50Ω 2Ω
R31
b
5Ω
4 FIG 5 FIG 6
2𝑘. 1 2𝑘Ω
𝑅𝑎 = =
2+1 3
2𝑘. 1 2𝑘Ω
𝑅𝑏 = =
2+1 3
4
𝑅𝑐 = 𝑅𝑎 + 𝑅𝑏 = kΩ
3
𝑉 = 𝐼. 𝑅 𝐼1′ = 50𝑚𝐴
100𝑣 = 𝐼. 2𝑘Ω 𝐼2′ = −50𝑚𝐴
𝐼 = 50𝑚𝐴
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
E2=0
2𝑘. 1 2𝑘Ω 1
𝑅𝑐 = = = 𝑘Ω
3+1 4 2
2𝑘. 1 2𝑘Ω 1
𝑅𝑑 = = = 𝑘Ω
3+1 4 2
𝑉 = 𝐼. 𝑅 𝐼1′′ = 100𝑚𝐴
100𝑣 = 𝐼. 1𝑘Ω 𝐼2′′ = −100𝑚𝐴
𝐼 = 100𝑚𝐴
RESULTADOS:
I1 = I1´ + I1´´ I2 = I2´ + I2´´
I1 = 50 − 100 I2 = 100 − 50
I1 = −50mA I2 = 50mA
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
2kΩ
R4 R5 E4 V2 E5 I1
V3
b V1
d 20Ω 8Ω
R27
R8 R7 R6 10 V 20 V
Circuitos Eléctricos 4Ω 16Ω 8Ω I1 E6 R10 2kΩ
4mA 12 V 10kΩ
R30
E1 E2
30 V 45 V 1.0kΩ
NOTA: I1 Está en sentido contrario
a
4. Hallar el equivalente Thevenin y Norton en los terminales a y b (fig. 4). R17
a
V13 2Ω V11
I3 2A 12 V R18 R19 12 V
6Ω 6Ω
V9
R15 R16
I5
a b R20
8Ω 8Ω R21 R22
18 V 6Ω
2Ω 2Ω
8A
3A I4
V12
V10 12 V
R31
b
5Ω
10 V
FIG 4 FIG 5 FI
DESARROLLO
Hallamos RTH
El circuito puede ser reducido por transformaciones de fuente.
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
Equivalente Thevenin
Equivalente Norton
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
R8 R7 R6 10 V 20 V
4Ω 16Ω 8Ω I1 E6 R10 2kΩ 2kΩ
V1
4mA 12 V 10kΩ 100 V
Circuitos Eléctricos R30 R29
E1 E2
30 V 45 V 1.0kΩ 1.0kΩ
5. Hallar el equivalente Thevenin y Norton en los terminales a y b (fig. 5).
a
R17
a
V13 2Ω V11
I3 2A 12 V R18 R19 12 V
6Ω 6Ω
R26 R24
V9
R15 R16 10Ω 20Ω
I5
a b R20
8Ω 8Ω R21 R22
18 V 6Ω
2Ω 2Ω
8A a b
3A I4
V12 R25 R23
12 V 50Ω 2Ω
V10
R31
b
5Ω
10 V
FIG 4 FIG 5 FIG 6
DESARROLLO
Para encontrar R Th:
OBTENEMOS:
6 18 20 60
𝑅𝑎 = 𝑅𝑏 = Ω ; 𝑅𝑐 = Ω ; 𝑅𝑑 = Ω ; 𝑅𝑒 = Ω ; 𝑅𝑡ℎ = 1,2Ω
7 7 7 7
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
para obtener VTh , aplicar el análisis de malla en el circuito:
−12 − 12 + 14i1 − 6i2 − 6i3 = 0, y 7i1 − 3i2 − 3i3 = 12 … (A)
12 + 12 + 14i2 − 6i1 − 6i3 = 0, y − 3i1 + 7i2 − 3i3 = −12 … (𝐵)
14i3 − 6i1 − 6i2 = 0, y − 3i1 − 3i2 + 7i3 = 0 … (C)
Creamos una matriz con (A), (B) y (C):
7 −3 −3 i1 12
i =
[−3 7 −3] [ 2 ] [−12]
−3 −3 7 i3 0
7 −3 −3
∆= [−3 7 −3] = 100
−3 −3 7
7 12 −3
∆2 = [−3 −12 −3] = −120
−3 0 7
∆2 −120
i2 = = = −1.2A
∆ 100
VTh = 12 − i2 = 9.6V
VTh
IN = = 8A
R Th
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
8Ω I1 E6 R10 2kΩ 2kΩ
V1
4mA 12 V 10kΩ 100 V
R30 R29
E2
45 V Circuitos Eléctricos 1.0kΩ 1.0kΩ
R17
6. Hallar el equivalente Thevenin
a y Norton en los terminales a y b (fig. 6).
V13 2Ω V11
12 V R18 R19 12 V
6Ω 6Ω
R26 R24
R16 10Ω 20Ω
I5
b R20
Ω R21 R22
6Ω
2Ω 2Ω
8A a b
V12 R25 R23
12 V 50Ω 2Ω
1
b
FIG 5 FIG 6
DESARROLLO
R Th = (10Ω + 20Ω)||(50Ω + 2Ω)
R Th = 30Ω||52Ω = 19.02439Ω
para encontrar 𝑉𝑇ℎ , consideramos el siguiente circuito:
8
I1 = I2 = =4
2
10I1 + VTh − 20I2 = 0
VTh = 20I2 − 10I1 = 10I1 = 10 ∗ 4 = 40V
VTh 40V
IN = = = 2.10256413A
R Th 19.02439Ω
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
7.- Teorema de Reciprocidad y Resistencia de Transferencia: Defina y de 3 ejemplos.
Teorema de la reciprocidad:
ENUNCIADO
“La relación entre la transformada de Laplace de una respuesta ya sea de corriente
o voltaje medida en un nodo de la red, y la excitación aplicada a otro nodo,
permanece invariante a un cambio de posiciones entre el nodo de observación y el
de excitación, siempre y cuando esta transformación no altere la estructura
topológica de la red”
Es decir, la corriente en cualquier rama de una red, debida a una fuente simple de
tensión en cualquier otro punto de la red, será igual a la corriente que pasa por la
rama en la que se encontraba originalmente la fuente, si ésta se pusiera en la rama
en que se midió originalmente la corriente.
Resistencia de transferencia:
La red lineal pasiva mencionada anteriormente se puede representar como un cuadripolo
pasivo lineal con sus terminales de entrada y de salida.
De acuerdo con el Teorema de Reciprocidad, la corriente (intensidad) que pasará por un
amperímetro conectado entre 3 y 4, cuando la fuente de voltaje esté entre 1 y 2, tendrá el
mismo valor que el que muestra un amperímetro conectado entre 1 y 2 cuando la fuente de
voltaje está entre 3 y 4.
Entonces: V12/I34= V34/I12
Esta relación entre un par de terminales y la corriente medida en otro par, se denomina
“Resistencia de transferencia”
V12 /I34 = Resistencia de transferencia directa
V34 / I12 = Resistencia de transferencia inversa
Entonces:
“En un cuadripolo pasivo lineal las resistencias
de transferencia directa e inversa son iguales“
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
EJEMPLOS:
1.
R t = R1 + R 2 ||(R 3 + R 4 )
R t = 12Ω + 6Ω||(2Ω + 4Ω)
R t = 12Ω + 6Ω||6Ω = 12Ω + 3Ω = 15Ω
E 45V
It = R = 15Ω = 3A
t
3A
I = = 1.5A
2
2. En el siguiente circuito se tiene una fuente de tensión en corriente directa de 10 Voltios,
entre 1 y 2, que alimenta una red de resistencias.
Si ahora se cambian de posición la fuente de tensión y el amperímetro, quedando la fuente de
tensión entre 3 y 4, y el amperímetro entre 1 y 2, como se muestra en el siguiente diagrama:
Se observa que en el amperímetro se lee una corriente de 20 mA. En conclusión, se puede
afirmar que: "El hecho de intercambiar la posición relativa de los puntos de inserción de la
fuente y del amperímetro no modifica los valores medidos".
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
3.
R T = R 4 + R 3 + R1 ||R 2
R T = 4Ω + 2Ω + 12Ω||6Ω = 10Ω
E 45V
It = = = 4.5A
RT 10Ω
6Ω∗4.5A 4.5A
I= 12Ω+6Ω
= 3 = 1.5A
8.- Mediciones con Puentes: Wheatstone, Kelvin, Maxwell, Hay, Schering, Wien.
Wheatstone
Un puente de Wheatstone es inventado por Samuel Hunter Christie en 1832, mejorado y
popularizado por Sir Charles Wheatstone en 1843.
Sirve para medir resistencias desconocidas mediante el equilibrio de sus brazos.
Consta de 4 ramas, una fuente de voltaje y un detector de cruce de cero por corriente.
Un puente esta balanceado cuando la corriente a través del galvanómetro es cero.
El puente tiene cuatro ramas resis-tivas, junto con una fuente de fem (una batería) y un
detector de cero, generalmente un galvanómetro u otro medidor sensible a la corriente. La
corriente a través del galvanómetro depende de la diferencia de potencial entre los puntos e
y d. Se dice que el puente está balanceado (o en equilibrio) cuando la diferencia de potencial
a través del galvanómetro es 0V, de forma que no hay paso de corriente a través de él. Esta
condición se cumple cuando el voltaje del punto e al punto a es igual que el voltaje del punto
d al punto a; o bien, tomando como referencia la otra terminal de la batería, cuando el voltaje
del punto e al punto bes igual que el voltaje del punto d al punto b. Por tanto, el puente está
en equilibrio cuando
𝐼1 𝑅1 = 𝐼2 𝑅2
Si la corriente del galvanómetro es cero, la siguiente condición también se cumple
𝐸 𝐸
𝐼1 = 𝐼3 = 𝑦 𝐼2 = 𝐼4 =
𝑅1 + 𝑅3 𝑅2 + 𝑅4
Lo cual se reduce en:
𝑅1 𝑅4 = 𝑅2 𝑅3
es la expresión conocida para el equilibrio del puente Wheatstone. Si tres de las resistencias
tienen valores conocidos, la cuarta puede establecerse a partir de la ecuación. De aquí, si R4
es la resistencia desconocida, y su valor Rx puede expresarse en términos de las resistencias
restantes como sigue:
𝑅2 𝑅3
𝑅𝑥 =
𝑅1
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
La resistencia R3 se denomina rama patrón del puente, y las resistencias R1 y R 1, se les
nombra ramas de relación.
La medición de la resistencia desconocida Rx, es independiente de las características o de la
calibración del galvanómetro detector de cero. puesto que el detector de cero tiene
suficiente sensibilidad para indicar la posición de equilibrio del puente con el grado de
precisión requerido.
Kelvin
Incrementa la exactitud con respecto al puente de Wheatstone.
Se usa para medir resistencias de valor bajo
El puente Kelvin es una modificación del Wheatstone y proporciona un gran incre-mento en Ja
exactitud de las mediciones de resistencias de valor bajo, por lo general inferiores a l U.
Considérese el circuito puente de la figura
Donde Ry representa la resistencia del alambre de conexión de R3 a Rx. Son posibles dos
conexiones del galvanómetro, en el punto m o en el punto n. Cuando el galvanómetro se
conecta en el punto m, la resistencia Ry del alambre de conexión se suma a la desconocida Rxy
resultando una indicación por arriba de Rx. Cuando la conexión se hace en el punto n, Ry se
suma a la rama del puente R3 y el resultado de la medición de Rx será menor que el que debería
ser, porque el valor real de R3 es más alto que su valor nominal debido a la resistencia Ry Si el
galvanómetro se conecta en el punto p, entre m y n, de tal forma que la razón de la resistencia
de n a p y m a p iguale la razón de los resisto-res R l y R2, entonces
𝑅𝑛𝑝 𝑅1
=
𝑅𝑚𝑝 𝑅2
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
La ecuación de equilibrio para el puente da:
𝑅1
𝑅𝑥 + 𝑅𝑛𝑝 = (𝑅 + 𝑅𝑚𝑝 )
𝑅2 3
Lo cual se reduce a:
𝑅1
𝑅𝑥 = 𝑅
𝑅2 3
es la ecuación de equilibrio desarrollada para el puente Wheatstone e indica que el efecto de
la resistencia del alambre de conexión del punto m al punto n se elimina conectando el
galvanómetro en la posición intermedia p. Esta es la base para la construcción del puente doble
Kelvin, conocido como puente Kelvin.
Maxwell
Mide inductancias.
Es función de capacitancia
Se usa para medir bobinas con Q medios
El puente Maxwell de la siguiente figura, se utiliza para medir una inductancia desconoci-da
en términos de una capacitancia conocida. Una de las ramas de relación tiene una resistencia
y una capacitancia en paralelo; ahora se puede probar que es más fácil escribir las ecuaciones
de balance usando la admitancia de la rama 1 en vez de su impedancia.
El reajuste de la ecuación general para el equilibrio del puente, dada en la ecuación:
𝑍1 𝑍4 + 𝑍2 𝑍3 , también se puede expresar de la siguiente forma:
𝑍𝑥 = 𝑌1 𝑍2 𝑍3
donde Y1 es la admitancia de la rama I. En relación con la figura, se tiene que:
𝐼
𝑍2 = 𝑅2 ; 𝑍3 = 𝑅3 y 𝑌1 = 𝑗𝜔𝐶1
𝑅1
Al separar términos reales e imaginarios:
𝑅2 𝑅3
𝑅𝑥 = 𝑦 𝐿𝑥 = 𝐶1 𝑅2 𝑅3
𝑅1
donde las resistencias se expresan en ohms, las inductancias en henrys y las capacitancias en
farads.
El puente Maxwell se limita a la medición de bobinas de Q medio (1 < Q < 10).
Esto puede mostrarse si se considera la segunda condición de equilibrio, la cual establece que
la suma de los ángulos de fase de un par de ramas opuestas debe ser igual a la suma de los
ángulos de fase del otro par. Puesto que los ángulos de fase en los elementos resistivos de las
ramas 2 y 3 suma 0°, y la suma de los ángulos de las ramas 1 y 4 también será de 0°. El ángulo
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
de fase de una bobina de Q alto será muy cercano a 90° (positivos), lo cual requiere que el
ángulo de fase de la rama capacitiva esté cerca de 90º (negativos). Esto significa que la
resistencia de R1 ha de ser muy grande, lo cual es poco práctico. Las bobinas de alto Q se miden
generalmente con el puente Hay.
El puente Maxwell tampoco es conveniente para la medición de bobinas con muy bajo valor
de Q (Q < J) debido a los problemas de convergencia en el equilibrio. Los valores bajos de Q
presentan resistencias inductivas, por ejemplo, una bobina de RF si se mide a baja frecuencia.
Como se puede observar de las ecuaciones para Rx y Lx, el ajuste para el equilibrio inductivo
por R3 afecta el equilibrio resistivo de R1 y da el efecto conocido como equilibrio deslizante.
Este describe la interacción entre los controles, de forma que el equilibrio se encuentra
variando R1 y posteriormente con R3 se repite el procedimiento que se encuentra un nuevo
punto de equilibrio. El punto de equilibrio da la impresión de moverse o deslizarse hacia su
sitio final después de muchos ajustes. La interacción no ocurre cuando R1 y C1 se usan para
el ajuste del equilibrio, pero un capacitor variable no siempre es adecuado.
El procedimiento normal para equilibrar el puente de Maxwell es ajustar primero R3 para el
equilibrio inductivo y luego ajustar R1 para el resistivo. Después al volver al ajuste de R3 se
advierte que el equilibrio resistivo se ha modificado hacia un nuevo valor. Este proceso se
repite y da una convergencia lenta hacia el equilibrio final. Para bobinas de Q medio, el efecto
de la resistencia no es pronunciado y el equilibrio se alcanza después de pocos ajustes.
Hay
Mide inductancias.
Es función de capacitancia
Se usa para medir bobinas con Q grandes
El puente Hay, de la siguiente figura, difiere del de Maxwell porque tiene una resistencia R1
en serie con el capacitor patrón C1 y no en paralelo. Es evidente que, para ángulos de fase
grandes, R, debe tener un valor muy bajo; por consiguiente, el puente Hay es más conveniente
para mediciones de bobinas de Q alto.
Las ecuaciones de equilibrio se derivan de la sustitución de los valores de las impedancias de
las ramas del puente en la ecuación general para el equilibrio del puente. Para el circuito de
la figura anterior se tiene que:
𝑗
𝑍1 = 𝑅1 − 𝜔𝐶 ; 𝑍2 = 𝑅2 ; 𝑍3 = 𝑅3 y 𝑍𝑥 = 𝑅𝑥 + 𝑗𝜔𝐿1
1
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
Esto lleva a:
𝜔2 𝐶12 𝑅1 𝑅2 𝑅3 𝐶1 𝑅2 𝑅3
𝑅𝑥 = 2 2 𝑦 𝐿𝑥 =
2
1 + 𝜔 𝐶1 𝑅1 1 + 𝜔 2 𝐶12 𝑅12
Ambas expresiones para la inductancia y resistencia desconocidas contienen la velocidad
angular w y, por tanto, se requiere que la frecuencia de la fuente de voltaje se deba conocer
con exactitud. Que esto no se aplique al medir bobinas de Q alto se sigue de las siguientes
consideraciones: si se recuerda que la suma de ángulos de fase a ramas opuestas debe ser
igual, el ángulo de fase inductivo ha de ser igual al ángulo de fase capacitivo, puesto que los
ángulos resistivos son cero. La siguiente figura muestra que la tangente del ángulo de fase
inductivo es igual a
𝑋𝐿 𝜔𝐿𝑥
𝑡𝑎𝑛𝜃𝐿 = = =𝑄
𝑅 𝑅𝑥
y que el ángulo de fase capacitivo es:
𝑋𝐶 1
𝑡𝑎𝑛𝜃𝐶 = =
𝑅 𝜔𝐶1 𝑅1
Cuando los dos ángulos se fase son iguales, sus tangentes también son iguales y entonces
1
𝑡𝑎𝑛𝜃𝐿 = 𝑡𝑎𝑛𝜃𝐶 𝑜 𝑄=
𝜔𝐶1 𝑅1
Schering
Mide capacitancias
La capacitancia desconocida se calcula en función de un capacitor y resistor conocidos.
El puente Schering, uno de los más importantes puentes de ca, se usa ampliamente para la
medición de capacitores. Aunque se utiliza para la medición de capacitancias en sentido
general, es particularmente útil para la medición de algunas propiedades de aislamiento, como
ángulos de fase muy cercanos a los 90°.
El circuito básico se muestra en la anterior figura, y por una inspección general al circuito se
observa muy parecido al puente de comparación. Nótese que ahora la rama 1 contiene una
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
combinación en paralelo de una resistencia y un capacitor, y la rama patrón sólo contiene un
capacitar. Por lo general, el capacitor patrón es de mica de alta calidad para mediciones
generales de trabajo, o puede ser un capacito r de aire para mediciones de aislamiento. Un
capacitor de mica de buena calidad tiene pérdidas muy bajas (sin resistencia) y por
consiguiente un ángulo de fase de alrededor de 90°. Cuando se diseña con cuidado un
capacitor de aire, éste tiene un valor muy estable y un campo eléctrico muy pequeño; el
material aislante por probar se puede conservar con facilidad fuera de cualquier campo fuerte.
Las condiciones de equilibrio requieren que la suma de los ángulos de fase de las ramas 1 y 4
sea igual a la suma de los ángulos de fase de las ramas 2 y 3. Puesto que el capacitor patrón
está en la rama 3, la suma de los ángulos de fase de las ramas 2 y 3 será 0° + 90° = 90°. Con el
fin de obtener el ángulo de fase de 90° que se necesita para el equilibrio, la suma de los ángulos
de las ramas 1 y 4 debe ser igual a 90°. Puesto que en la realización general de mediciones la
cantidad desconocida tiene un ángulo de fase menor de 90°, es necesario dar a la rama I un
ángulo capacitivo pequeño por medio de la conexión del capacitor C1 en paralelo con el
resistor R1. Un ángulo capacitivo pequeño es muy fácil de obtener; sólo se requiere un
capacitor pequeño a través de R1.
Las ecuaciones de equilibrio se derivan como es habitual; por la sustitución de los valores
correspondientes de impedancia y admitancia en la ecuación general, se obtiene:
𝑗 −𝑗 1
𝑍𝑥 = 𝑍2 𝑍3 𝑌1 𝑜 𝑅𝑥 − = 𝑅2 ( ) ( + 𝑗𝜔𝐶1 )
𝜔𝐶𝑥 𝜔𝐶3 𝑅1
Al igualar los términos reales e imaginarios, entonces:
𝐶1 𝑅1
𝑅𝑥 = 𝑅2 𝑦 𝐶𝑥 = 𝐶3
𝐶3 𝑅2
Como se puede ver en el diagrama del circuito de la figura anterior, las dos variables que se
escogen para el ajuste del equilibrio son el capacitor C1 y el resistor R2. Parece ser. Que no hay
nada diferente en las ecuaciones de equilibrio o en la selección de los componentes variables,
pero considérese por un momento cómo se define la calidad del capacitor.
El factor de potencia (PF) de una combinación serie RC se define por el coseno del ángulo de
fase del circuito. Por consiguiente, el PF de la impedancia desconocida es PF = Rx/Zx. Para
ángulos de fase muy cercanos a 90°, la reactancia es casi igual a la impedancia y cabe aproximar
el factor de potencia a:
𝑅𝑥
𝑃𝐹 = = 𝜔𝐶𝑥 𝑅𝑥
𝑋𝑥
El factor de disipación de un circuito serie RC se define como la cotangente del ángulo de fase
y, por tanto, por definición será
𝑅𝑥
𝐷= = 𝜔𝐶𝑥 𝑅𝑥
𝑋𝑥
Ya que el factor de calidad de una bobina se define por Q = XL/ RL, se observa que el factor de
disipación, D, es el recíproco del factor de calidad, Q, esto es, D = l/Q.
El factor de disipación es un factor que indica la calidad del capacitor; por ejemplo, cuán
cercano está el ángulo de fase del capacitor del valor ideal de 90°. Con la sustitución del valor
de Cx, en la expresión para el factor de disipación, se tiene:
𝐷 = 𝜔𝑅1 𝐶1
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
Si el resistor R1 en el puente Schering de la figura del puente Schering tiene un valor fijo, el
dial del capacitor C1 se puede calibrar directamente en función del factor de disipación D.
Esta es la utilidad práctica del puente Schering. Esto significa que la calibración del dial de C1
sólo se conserva para la frecuencia a la cual el dial se calibró. Se puede utilizar una frecuencia
diferente multiplicando el dial C1 por la relación de las dos frecuencias. La figura del puente
Schering, muestra un puente automático moderno.
Wien
Se usa para medir frecuencias
Funciona también como filtro pasa bandas
El puente Wien se presenta aquí por su uso como puente de ca para medir frecuencias y por
las aplicaciones que tiene en otros circuitos; por ejemplo, en el analizador de distorsión
armónica, en donde se usa como un filtro pasabanda, el cual puede discriminar una frecuencia
específica. El puente Wien también tiene aplicaciones en los osciladores de audio y HF como
el elemento que determina la frecuencia. En este capítulo se estudia en su forma básica,
diseñado para la medición de frecuencia; en otros capítulos se analiza la aplicación en
diferentes tipos de instrumentos.
El puente Wien tiene una combinación en serie RC en una rama y una combinación en paralelo
RC en la rama adjunta (anterior figura mostrada). La impedancia de la rama 1 es:
1
𝑍1 = 𝑅1 − 𝑗/𝜔𝐶1 . La admitancia de la rama 3 es 𝑌3 = + 𝜔𝐶3 . Con la ecuación básica para
𝑅3
el balance del puente y al sustituir los valores apropiados se obtiene
𝑗 1
𝑅2 = (𝑅1 − ) 𝑅4 ( + 𝑗𝜔𝐶3 )
𝜔𝐶1 𝑅3
Se reduce en:
𝑅2 𝑅1 𝐶3
= +
𝑅4 𝑅3 𝐶1
Al igualar términos se obtiene:
𝑅1
𝜔𝐶3 𝑅1 𝑅4 = ; 𝑑𝑜𝑛𝑑𝑒: 𝜔 = 2𝜋𝑓
𝜔𝐶1 𝑅3
Se obtiene:
1
𝑓=
2𝜋√𝐶1 𝐶3 𝑅1 𝑅3
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
Nótese que las dos condiciones para el equilibrio del puente resultan en una expresión que
determina la relación de resistencias requerida R2/ R4, y otra expresión que determina la
frecuencia del voltaje aplicado. En otras palabras, si se satisface la ecuación, y se excita el
puente con la frecuencia el puente queda en equilibrio.
En la mayoría de los circuitos del puente Wien, los componentes se seleccionan de manera tal
que R1=R3 y C1=C3.
𝑅2 𝑅 𝐶3 𝑅2
Esto reduce la ecuación = 1 + en = 2
𝑅4 𝑅3 𝐶1 𝑅4
1 1
Y la ecuación 𝑓 = en 𝑓 = 2𝜋𝑅𝐶
2𝜋√𝐶1 𝐶3 𝑅1 𝑅3
la cual es la expresión general para la frecuencia del puente Wien. En un puente práctico, los
capacitores C, y C3 son capacitores fijos, y los resistores R, y R3 son resistores variables
controladas por un eje común. Si se tiene que R2 = 2R4, el puente se puede usar como un
dispositivo para determinar la frecuencia en equilibrio por un solo control. Este control se
puede calibrar directamente en términos de frecuencia.
Debido a su sensibilidad a la frecuencia, el puente Wien puede ser difícil de equilibrar (a menos
que la forma de onda del voltaje aplicado sea puramente senoidal). Ya que el puente no se
equilibra con cualquier armónica presente en el voltaje aplicado, estas armónicas producen
algunas veces un voltaje de salida que distorsiona el punto de equilibrio.
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Circuitos Eléctricos
Bibliografía
Coopper, W., & Helfrick, A. (1991). Instrumentación Electronica Moderna y Técnicas de Medición
(Primera ed.). Naucalpan de Juárez, Mexico: Prentice Hall Hispanoamericana.
Caballero Olivares, Ronald Gallardo Jacinto, Alexander
Vous aimerez peut-être aussi
- Tarea Primera SemanaDocument3 pagesTarea Primera SemanaAlexander GallardoPas encore d'évaluation
- Ficha Cesar Damian Al 08mar18Document1 pageFicha Cesar Damian Al 08mar18Alexander GallardoPas encore d'évaluation
- Tarea Clase 5Document1 pageTarea Clase 5Alexander GallardoPas encore d'évaluation
- Analisis Del Codigo de Etica de Psicologos DelDocument22 pagesAnalisis Del Codigo de Etica de Psicologos DelAlexander GallardoPas encore d'évaluation
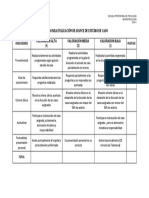
- Rúbrica para Evaluación de Discusión de Avance de Caso AsignadoDocument1 pageRúbrica para Evaluación de Discusión de Avance de Caso AsignadoAlexander GallardoPas encore d'évaluation
- Lectura Autoestima IDocument4 pagesLectura Autoestima IEdwin Alonso Guevara BecerraPas encore d'évaluation
- Fuerza Electromotriz, Resistencia Interna, Eficiencia Y Potencia de Un Fuente de Corriente ContinuaDocument9 pagesFuerza Electromotriz, Resistencia Interna, Eficiencia Y Potencia de Un Fuente de Corriente ContinuaasdasdPas encore d'évaluation
- Tema 06 - Ley de Ohm y Kirchoff ProblemasDocument5 pagesTema 06 - Ley de Ohm y Kirchoff ProblemasjjaavvmmPas encore d'évaluation
- Gfpi-F-019 Guia de Aprendizaje 03 Electricidad BasicaDocument9 pagesGfpi-F-019 Guia de Aprendizaje 03 Electricidad BasicaMilena Ulloa UlloaPas encore d'évaluation
- Practica 03 1Document9 pagesPractica 03 1Franco Garcia ValeraPas encore d'évaluation
- 4 Informe de Fisica IIIDocument34 pages4 Informe de Fisica IIICristhianAsmatD'Angelo100% (1)
- Características Eléctricas Del Transistor MonouniónDocument4 pagesCaracterísticas Eléctricas Del Transistor MonouniónMinistroGarezPas encore d'évaluation
- Guia Identificacion Cables EstructuradoDocument52 pagesGuia Identificacion Cables EstructuradoDigg LtdaPas encore d'évaluation
- Circuitos de Sonda de Osciloscopio V1Document10 pagesCircuitos de Sonda de Osciloscopio V1maryland001Pas encore d'évaluation
- Ashcroft Estado SolidoDocument257 pagesAshcroft Estado SolidoNAMUK JAMESPas encore d'évaluation
- El Circuito Eléctrico ElementalDocument6 pagesEl Circuito Eléctrico ElementalAlfredo Santana100% (1)
- 3c2ba e S o C 3 Electr y Electrc3b3nica II CircuitosDocument2 pages3c2ba e S o C 3 Electr y Electrc3b3nica II CircuitosMaríaPas encore d'évaluation
- Divisor de Tensión y Puente de WheatstoneDocument3 pagesDivisor de Tensión y Puente de WheatstoneCristhian Gomez AlvaradoPas encore d'évaluation
- Amplificador en Fuente Común Del JFET Canal NDocument12 pagesAmplificador en Fuente Común Del JFET Canal NDaniel R.Pas encore d'évaluation
- TAREA 01 PARCIAL 1 - Revisión Del IntentoDocument9 pagesTAREA 01 PARCIAL 1 - Revisión Del IntentoSteven MalavéPas encore d'évaluation
- Leandra Salazar Tarea Semana 8Document8 pagesLeandra Salazar Tarea Semana 8Cristian Rousseau Lerou Cruces100% (1)
- FÍSICA Semana13Document42 pagesFÍSICA Semana13carlos rubio garciaPas encore d'évaluation
- Laboratorio N°01Document16 pagesLaboratorio N°01Eliana RozasPas encore d'évaluation
- Trabajo de Circuitos Estudiante 2Document5 pagesTrabajo de Circuitos Estudiante 2Alfred R. TorresPas encore d'évaluation
- Modalidad de Exámenes - Semana 2 - Revisión Del IntentoDocument2 pagesModalidad de Exámenes - Semana 2 - Revisión Del IntentoAldo López0% (1)
- Actividades Unidad 12Document8 pagesActividades Unidad 12Paula Garrido VázquezPas encore d'évaluation
- TriacDocument73 pagesTriacXLauritax TkPas encore d'évaluation
- GUIA Actividades Unidad1Document11 pagesGUIA Actividades Unidad1marcoPas encore d'évaluation
- Actividad Fundamentos de ElecticidadDocument2 pagesActividad Fundamentos de ElecticidadcamilaPas encore d'évaluation
- Memorias de Cálculo y Cuadro de CargasDocument5 pagesMemorias de Cálculo y Cuadro de Cargasoscar sarabiaPas encore d'évaluation
- Guia Circuito SerieDocument7 pagesGuia Circuito SeriewaportPas encore d'évaluation
- Guía Panel SolarDocument24 pagesGuía Panel SolarMARIA DANIELA BUITRAGO TRILLOSPas encore d'évaluation
- T18Document24 pagesT18JM CuevasPas encore d'évaluation
- Filtro Rechaza BandaDocument13 pagesFiltro Rechaza BandaMurillo Perez Cristhian AntonyPas encore d'évaluation
- Universidad Central Del EcuadorDocument39 pagesUniversidad Central Del EcuadorStefy TeránPas encore d'évaluation
- Taller 1. Ley de Ohm 2022-IIDocument5 pagesTaller 1. Ley de Ohm 2022-IIELVYS CAMILO ALBARRACIN GOMEZPas encore d'évaluation