Vous aimerez peut-être aussi
- ME 411 - FEM - L2 - Intro To Stiffness Method V1 PDFDocument45 pagesME 411 - FEM - L2 - Intro To Stiffness Method V1 PDFZain MustafaPas encore d'évaluation
- ME458 FEM - L2 - Intro To Stiffness MethodDocument44 pagesME458 FEM - L2 - Intro To Stiffness MethodAli Arsal KhanPas encore d'évaluation
- Flexibility 1 HDocument27 pagesFlexibility 1 Hمختار ابراهيمPas encore d'évaluation
- Module 1Document45 pagesModule 1MD SHAHRIARMAHMUDPas encore d'évaluation
- Chatper 4 FEM Procedure and Spring Element PDFDocument9 pagesChatper 4 FEM Procedure and Spring Element PDFVijay SinghPas encore d'évaluation
- Raw:/storage/emulated/0/Download/ES 222 MODULE 5Document29 pagesRaw:/storage/emulated/0/Download/ES 222 MODULE 5Marvin Espenocilla EspeñoPas encore d'évaluation
- ME458 FEM - L3 - Bar Truss EqsDocument64 pagesME458 FEM - L3 - Bar Truss EqsAli Arsal KhanPas encore d'évaluation
- Finite Element notes1-BTechDocument13 pagesFinite Element notes1-BTechAmjad AtayaPas encore d'évaluation
- Assignment 02 AE675Document3 pagesAssignment 02 AE675yvnarayanaPas encore d'évaluation
- CIVL 8/7117 Chapter 3 - Development of Truss Equations 1/77Document77 pagesCIVL 8/7117 Chapter 3 - Development of Truss Equations 1/77georgelennon68Pas encore d'évaluation
- Chapter 3Document16 pagesChapter 3eliasPas encore d'évaluation
- Mathematical Modeling of Mechanicalsystem (Spring, Mass, Damper)Document12 pagesMathematical Modeling of Mechanicalsystem (Spring, Mass, Damper)yasinPas encore d'évaluation
- Normal Modes of A Coutiunous System CH 614112023Document79 pagesNormal Modes of A Coutiunous System CH 614112023Umair KhanPas encore d'évaluation
- The Stiffness (Displacement) Method Step by StepDocument32 pagesThe Stiffness (Displacement) Method Step by StepRoscii Rulez100% (2)
- Chapter 03aDocument80 pagesChapter 03aDamir KisoPas encore d'évaluation
- Chapter 16Document43 pagesChapter 16German ToledoPas encore d'évaluation
- 1Document15 pages1manognya salendraPas encore d'évaluation
- Chapter-3-Fem Analysis TrussesDocument32 pagesChapter-3-Fem Analysis TrussesFaisal MumtazPas encore d'évaluation
- Bars and Trusses: ME 206T Unit-I Lecture-IIIDocument21 pagesBars and Trusses: ME 206T Unit-I Lecture-IIIRamsingh MeenaPas encore d'évaluation
- Chapter 7 - Finite Element Method For Solid Mechanics (2016!09!14)Document17 pagesChapter 7 - Finite Element Method For Solid Mechanics (2016!09!14)RickPas encore d'évaluation
- Chapter 7 - Finite Element Method For Solid Mechanics (2016!10!10)Document80 pagesChapter 7 - Finite Element Method For Solid Mechanics (2016!10!10)RickPas encore d'évaluation
- Gradient Of A Function هّلادلا رادحنإDocument11 pagesGradient Of A Function هّلادلا رادحنإGafeer FablePas encore d'évaluation
- ElectrodynamicsDocument35 pagesElectrodynamicsRajuPas encore d'évaluation
- Lecture 3Document150 pagesLecture 3Kedir ShiferawPas encore d'évaluation
- Lecture 1Document51 pagesLecture 1MOHIT PANTPas encore d'évaluation
- Chapter 4.1 - Direct Stiffness Method - StructuralDocument49 pagesChapter 4.1 - Direct Stiffness Method - Structuralsanyam KanungaPas encore d'évaluation
- FEA TheoryDocument49 pagesFEA Theoryof_switzerlandPas encore d'évaluation
- Asen 3112 Lab 2Document13 pagesAsen 3112 Lab 2api-497657561Pas encore d'évaluation
- Direct - Method Solved ExamplesDocument25 pagesDirect - Method Solved ExamplesHusnain100% (1)
- Module 5, Week 5, CE-301, Dr. Bashir AlamDocument51 pagesModule 5, Week 5, CE-301, Dr. Bashir AlamMohd IdreesPas encore d'évaluation
- On Spectral Element MethodDocument38 pagesOn Spectral Element MethodBaharulHussainPas encore d'évaluation
- 5 - Impulse and MomentumDocument17 pages5 - Impulse and MomentumAbdallah HassanPas encore d'évaluation
- 05-Bar Elements in 2d SpaceDocument49 pages05-Bar Elements in 2d SpaceMohd NasimPas encore d'évaluation
- Finite Element Technology: Lecture NotesDocument63 pagesFinite Element Technology: Lecture NotesJuan Francisco Acuña ContrerasPas encore d'évaluation
- Finite Element Method - Bar ElementsDocument38 pagesFinite Element Method - Bar ElementshasniloubakiPas encore d'évaluation
- Lec#9, Deflection of Beam-Determinate BeamDocument30 pagesLec#9, Deflection of Beam-Determinate Beamchristianborlaza23Pas encore d'évaluation
- Module 3Document10 pagesModule 3Benson MataPas encore d'évaluation
- 03a Direct Stiffness Method Spring and BarDocument23 pages03a Direct Stiffness Method Spring and BarAnamolPas encore d'évaluation
- Backward Forward PropogationDocument19 pagesBackward Forward PropogationConrad WaluddePas encore d'évaluation
- Fea 2MDocument13 pagesFea 2MSubharanjani MathiPas encore d'évaluation
- Global Stiffness MatrixDocument13 pagesGlobal Stiffness Matrixasfsaf0% (1)
- Development of Truss Equation: Finite Element MethodDocument5 pagesDevelopment of Truss Equation: Finite Element MethodMeity WulandariPas encore d'évaluation
- Lecture 2 Second Lecture 2023Document21 pagesLecture 2 Second Lecture 2023yakwetuPas encore d'évaluation
- Ae5310midterm 2022 OctoberDocument6 pagesAe5310midterm 2022 OctoberJohnPas encore d'évaluation
- 10-Linear Strain Triangle and Other Types of 2d ElementsDocument31 pages10-Linear Strain Triangle and Other Types of 2d Elementskranthi142434Pas encore d'évaluation
- FEA TheoryDocument49 pagesFEA Theoryabdulla_alazzawiPas encore d'évaluation
- Caso Placa 4Document42 pagesCaso Placa 4Fanny Jamachi AriPas encore d'évaluation
- Understanding Vector Calculus: Practical Development and Solved ProblemsD'EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsPas encore d'évaluation
- A-level Maths Revision: Cheeky Revision ShortcutsD'EverandA-level Maths Revision: Cheeky Revision ShortcutsÉvaluation : 3.5 sur 5 étoiles3.5/5 (8)
- Beams and Framed Structures: Structures and Solid Body MechanicsD'EverandBeams and Framed Structures: Structures and Solid Body MechanicsÉvaluation : 3 sur 5 étoiles3/5 (2)
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsD'EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsPas encore d'évaluation
- Difference Equations in Normed Spaces: Stability and OscillationsD'EverandDifference Equations in Normed Spaces: Stability and OscillationsPas encore d'évaluation
- N70F I3 R0 EnglishDocument1 pageN70F I3 R0 English阿康Pas encore d'évaluation
- Abandonment of WellsDocument9 pagesAbandonment of Wellskewall lalta RamirezPas encore d'évaluation
- Tests of Backscatter Coefficient Measurement Using Broadband PulsesDocument5 pagesTests of Backscatter Coefficient Measurement Using Broadband PulsesMostafa AbdelrahmanPas encore d'évaluation
- Rigid PavementDocument17 pagesRigid Pavementsunilgera50% (2)
- Phased Array Ultrasonic Testing-BLUESTARDocument93 pagesPhased Array Ultrasonic Testing-BLUESTARLương Hồ Vũ100% (3)
- CSIR NET June 2021 Organic ChemistryDocument99 pagesCSIR NET June 2021 Organic ChemistrySankar AdhikariPas encore d'évaluation
- Electrostatic AnalyzerDocument6 pagesElectrostatic AnalyzerKcirtap ZkethPas encore d'évaluation
- Energy Conversion and ManagementDocument10 pagesEnergy Conversion and ManagementRamón CevallosPas encore d'évaluation
- Material Selection & Design PDFDocument9 pagesMaterial Selection & Design PDFKamlesh DalavadiPas encore d'évaluation
- Grade 7 Science Chapter 8 NotesDocument80 pagesGrade 7 Science Chapter 8 Notesapi-23858960280% (5)
- Behavior of SS-316 in Engine Oil Simulated EnvironmentDocument5 pagesBehavior of SS-316 in Engine Oil Simulated EnvironmentAnush RajPas encore d'évaluation
- Dalian DB Pump EAP-Catalogue-English-2009Document13 pagesDalian DB Pump EAP-Catalogue-English-2009Lukarsa2013100% (1)
- Atmospheric Water Water VapourDocument6 pagesAtmospheric Water Water VapourBrian chunguliPas encore d'évaluation
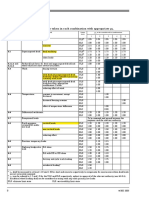
- Table 1 - Loads To Be Taken in Each Combination With AppropriateDocument2 pagesTable 1 - Loads To Be Taken in Each Combination With AppropriateAdi HamdaniPas encore d'évaluation
- Ruukki Double Grade S420MH S355J2H RectangularDocument6 pagesRuukki Double Grade S420MH S355J2H Rectangularhooky1Pas encore d'évaluation
- CSE - 27 A3 Application of sf6 Alternatives For Retro Filling Existing EquipmentDocument13 pagesCSE - 27 A3 Application of sf6 Alternatives For Retro Filling Existing EquipmentTXEMAPas encore d'évaluation
- The Physics of Superfluid Helium: W. F. VinenDocument12 pagesThe Physics of Superfluid Helium: W. F. VinenPaulo CesarPas encore d'évaluation
- TPTG620 - Teaching Practice (Long Term) : Assignment Lesson Plan (Fall 2020) Total Marks: 20 - +instructionsDocument6 pagesTPTG620 - Teaching Practice (Long Term) : Assignment Lesson Plan (Fall 2020) Total Marks: 20 - +instructionsnisar aliPas encore d'évaluation
- Basic Principles in Formworks Design-ACELDocument44 pagesBasic Principles in Formworks Design-ACELronelyn bernalPas encore d'évaluation
- Durehete 950Document5 pagesDurehete 950ellisforheroes100% (1)
- Stiffness Modifiers For Walls ETABSDocument3 pagesStiffness Modifiers For Walls ETABSHiren DesaiPas encore d'évaluation
- Samrat - Chem QP Unit Test XIDocument3 pagesSamrat - Chem QP Unit Test XIPriyam PandaPas encore d'évaluation
- New Frontiers For The Pipeline Integrity ManagementDocument16 pagesNew Frontiers For The Pipeline Integrity ManagementMubeenPas encore d'évaluation
- AP Sem 1 Final ReviewDocument42 pagesAP Sem 1 Final ReviewSakib AlamPas encore d'évaluation
- Sonatrach - Training - Manual - Tuga - 5001paDocument841 pagesSonatrach - Training - Manual - Tuga - 5001paalaeddine chahdane100% (2)
- P5 Q1 Experimental Design Updated To MJ22 ALL TOPICSDocument6 pagesP5 Q1 Experimental Design Updated To MJ22 ALL TOPICSSaad NahraPas encore d'évaluation
- Satellite Antenna TestingDocument47 pagesSatellite Antenna Testingsailee_gharatPas encore d'évaluation
- 105mm Enhanced GunDocument38 pages105mm Enhanced Gungrindormh53100% (1)
- Introduction To Inorganic Chemistry (Skt1013) Solid State Chemistry 3Document38 pagesIntroduction To Inorganic Chemistry (Skt1013) Solid State Chemistry 3izz isalahPas encore d'évaluation
- Instrumentation For Mechanics of BreathingDocument59 pagesInstrumentation For Mechanics of BreathingAnonymous hMC57ukPas encore d'évaluation