Vous aimerez peut-être aussi
- Chapter 03 - Mechanism and Linkages - Part BDocument37 pagesChapter 03 - Mechanism and Linkages - Part BMuaz FadzilPas encore d'évaluation
- Chap-8 Gear TrainDocument18 pagesChap-8 Gear TrainAlysPas encore d'évaluation
- Double Slider Crank ChainDocument3 pagesDouble Slider Crank ChainVijay Gorfad0% (1)
- Linkages: 2.1. FOUR - Bar LinkageDocument29 pagesLinkages: 2.1. FOUR - Bar LinkageaddisudagnePas encore d'évaluation
- Mechanics of Machines ProjectDocument18 pagesMechanics of Machines ProjectSheikh Mohamed NaimPas encore d'évaluation
- Epicyclic Gear Train Write UpDocument8 pagesEpicyclic Gear Train Write UpkulkajinkyaPas encore d'évaluation
- Kinematics of Machinery (AU 402) : Types of Kinematic Chain With Four Lower PairsDocument11 pagesKinematics of Machinery (AU 402) : Types of Kinematic Chain With Four Lower PairsJanardhanaPas encore d'évaluation
- GEARSDocument46 pagesGEARSsrsoumyankPas encore d'évaluation
- Gear Trains: 8.1. Angular Velocity RatioDocument16 pagesGear Trains: 8.1. Angular Velocity RatioaddisudagnePas encore d'évaluation
- Program Branch Regulations B.E Mechanical Engineering 2018: S.No Choose The Best Answers OP1Document4 pagesProgram Branch Regulations B.E Mechanical Engineering 2018: S.No Choose The Best Answers OP1dsathiyaPas encore d'évaluation
- Kinematic Analysis of GearsDocument91 pagesKinematic Analysis of GearsParas ThakurPas encore d'évaluation
- Mechanics of Machines - Dda 3043 Power Transmission System: Gear SystemDocument20 pagesMechanics of Machines - Dda 3043 Power Transmission System: Gear SystemNURUL SYUHADA BT ISMAIL HAJAR100% (1)
- Gear Trains Definition and Types With PDFDocument4 pagesGear Trains Definition and Types With PDFAneez ShresthaPas encore d'évaluation
- Kinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksDocument32 pagesKinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksRameez FaroukPas encore d'évaluation
- Gear TrainsDocument35 pagesGear TrainsFelagot SisayPas encore d'évaluation
- KOM Unit-5Document7 pagesKOM Unit-5puneethPas encore d'évaluation
- Lecture - 2 - Inversion of MechanismDocument34 pagesLecture - 2 - Inversion of MechanismGorkha EngineeringPas encore d'évaluation
- Chapter 4. Gear Train: Engr. Jonathan S. RodolfoDocument16 pagesChapter 4. Gear Train: Engr. Jonathan S. RodolfoBrian JasperPas encore d'évaluation
- TOMDocument27 pagesTOMLokesh Kumar GuptaPas encore d'évaluation
- Aplikasi Roda Gigi (Kelompok 2)Document30 pagesAplikasi Roda Gigi (Kelompok 2)Fandrio PermataPas encore d'évaluation
- MIN 301 Dynamics of Machines ExperimentsDocument12 pagesMIN 301 Dynamics of Machines ExperimentsSaifullah AhmadPas encore d'évaluation
- Differential Gear Box DesignDocument61 pagesDifferential Gear Box Designramkumar121Pas encore d'évaluation
- 06 Sept - Inversions of Slider CrankDocument34 pages06 Sept - Inversions of Slider CrankSreejith SreePas encore d'évaluation
- CH 13Document27 pagesCH 13Sanjay KumarPas encore d'évaluation
- Chapter 9 Gear TrainsDocument99 pagesChapter 9 Gear TrainsAmalina100% (1)
- Supplementary Questions - Transmission 1. (2007/2008/3 Main Q3)Document3 pagesSupplementary Questions - Transmission 1. (2007/2008/3 Main Q3)Ong Teck ChongPas encore d'évaluation
- 9A03502 Dynamics of MachineryDocument4 pages9A03502 Dynamics of MachinerysivabharathamurthyPas encore d'évaluation
- Gear Trains: (Chapter 6)Document28 pagesGear Trains: (Chapter 6)Suresh ParamuPas encore d'évaluation
- Final Test Simulation KinematicDocument2 pagesFinal Test Simulation KinematicIlhariri Muhammad IrlisPas encore d'évaluation
- Automatic Quality Measuring of Precision GearboxesDocument6 pagesAutomatic Quality Measuring of Precision GearboxesPeterPas encore d'évaluation
- Curves: Compound Curves and Super Elevation EtcDocument20 pagesCurves: Compound Curves and Super Elevation EtcShahid AliPas encore d'évaluation
- Gears ReviewDocument28 pagesGears ReviewsharmendrayadavPas encore d'évaluation
- Gears ReviewDocument28 pagesGears ReviewSridhar RaoPas encore d'évaluation
- Assignment Questions Dom Me 5004Document5 pagesAssignment Questions Dom Me 5004sharmasweeta927Pas encore d'évaluation
- Kinematics OF Machinery: Adithya Institute of TechnologyDocument34 pagesKinematics OF Machinery: Adithya Institute of TechnologybalajimetturPas encore d'évaluation
- PhysicsDocument22 pagesPhysicsNudžejma KadrićPas encore d'évaluation
- TOM 3BT 14-15 Lecture Set-6 - Gear Train - KGDocument52 pagesTOM 3BT 14-15 Lecture Set-6 - Gear Train - KGmercy giftPas encore d'évaluation
- Gear Train PDFDocument18 pagesGear Train PDFamanuelfitsum589Pas encore d'évaluation
- Machine Design IIDocument11 pagesMachine Design IIExequiel MedinaPas encore d'évaluation
- Balancing of Reciprocating MassesDocument29 pagesBalancing of Reciprocating MassesPraful KhondePas encore d'évaluation
- A Discourse On Synergy of Rail & Wheel: SynopsisDocument12 pagesA Discourse On Synergy of Rail & Wheel: SynopsisKRDCL Camp Office ErnakulamPas encore d'évaluation
- Find The Belt Length at A 72 in Distance Connected in Open Belt. The Pulley Diameters Are 6 and 12 inDocument4 pagesFind The Belt Length at A 72 in Distance Connected in Open Belt. The Pulley Diameters Are 6 and 12 inGeoffrey GolbequePas encore d'évaluation
- FirstlyDocument5 pagesFirstlynwg6ssdm8rPas encore d'évaluation
- 1 Epicyclic Gear Train ExperimentDocument6 pages1 Epicyclic Gear Train Experimentshuyun88100% (6)
- Klein Technical GuidelineDocument21 pagesKlein Technical GuidelinePeter100% (2)
- Dom SolvedDocument49 pagesDom SolvedRAJESH. RPas encore d'évaluation
- Question Bank of Kinematics of MachinesDocument3 pagesQuestion Bank of Kinematics of MachinesnikhilPas encore d'évaluation
- Assignment Unit - 1: 2) .A Pair of Involute Gears Is in Mesh. The Application Restricts The Space To Accommodate TheseDocument4 pagesAssignment Unit - 1: 2) .A Pair of Involute Gears Is in Mesh. The Application Restricts The Space To Accommodate TheserahulPas encore d'évaluation
- Speed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3Document10 pagesSpeed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3rohitkjPas encore d'évaluation
- Gear TrainDocument16 pagesGear Trainmudassir habibPas encore d'évaluation
- Chapter 1 Lecturer - Gear DriveDocument46 pagesChapter 1 Lecturer - Gear Drivehamry0% (1)
- Torque AssignmentDocument13 pagesTorque AssignmentMostafa Ahmed ZeinPas encore d'évaluation
- PHY 303K - Florin - Exam IV - Fall 2013Document42 pagesPHY 303K - Florin - Exam IV - Fall 2013Roger100% (1)
- rr310304 Kinematics of MachineryDocument12 pagesrr310304 Kinematics of MachinerySrinivasa Rao GPas encore d'évaluation
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkD'EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkPas encore d'évaluation
- A New System of Alternating Current Motors and Transformers and Other EssaysD'EverandA New System of Alternating Current Motors and Transformers and Other EssaysÉvaluation : 5 sur 5 étoiles5/5 (1)
- Exercises in Electronics: Operational Amplifier CircuitsD'EverandExercises in Electronics: Operational Amplifier CircuitsÉvaluation : 3 sur 5 étoiles3/5 (1)
- Projectile Motion AllDocument5 pagesProjectile Motion AllKOMALPas encore d'évaluation
- Iron CarbonDocument18 pagesIron CarbonAshish AgarwalPas encore d'évaluation
- Iron CarbonDocument18 pagesIron CarbonAshish AgarwalPas encore d'évaluation
- Textbook of Environment Studies For Undergraduate Courses - Erach Bharucha PDFDocument260 pagesTextbook of Environment Studies For Undergraduate Courses - Erach Bharucha PDFPari Athouba100% (2)
- Engineering Mechanics: Kamlesh PandharamDocument10 pagesEngineering Mechanics: Kamlesh PandharamKOMALPas encore d'évaluation
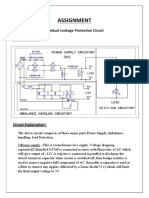
- Assignment: Residual Leakage Protection Circuit Circuit DiagramDocument2 pagesAssignment: Residual Leakage Protection Circuit Circuit DiagramShivam ShrivastavaPas encore d'évaluation
- Modern Construction HandbookDocument498 pagesModern Construction HandbookRui Sousa100% (3)
- How To Install Metal LathDocument2 pagesHow To Install Metal LathKfir BenishtiPas encore d'évaluation
- Technical Sheet Racloflex NTDocument2 pagesTechnical Sheet Racloflex NTAnthony AngPas encore d'évaluation
- MSDS Buffer Solution PH 4.0Document5 pagesMSDS Buffer Solution PH 4.0Ardhy LazuardyPas encore d'évaluation
- 147 Amity Avenue Nampa, ID 81937 (999) 999-9999 William at Email - ComDocument4 pages147 Amity Avenue Nampa, ID 81937 (999) 999-9999 William at Email - ComjeyesbelmenPas encore d'évaluation
- Test On Real NumberaDocument1 pageTest On Real Numberaer.manalirathiPas encore d'évaluation
- Load Chart Crane LiftingDocument25 pagesLoad Chart Crane LiftingLauren'sclub EnglishBimbel Sd-sma100% (1)
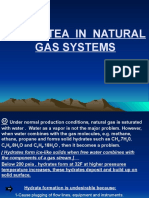
- Chapter 2 HydrateDocument38 pagesChapter 2 HydrateTaha Azab MouridPas encore d'évaluation
- Chakir Sara 2019Document25 pagesChakir Sara 2019hiba toubaliPas encore d'évaluation
- Cause Analysis For Spun Pile Crack and BrokenDocument11 pagesCause Analysis For Spun Pile Crack and BrokenRony LesbtPas encore d'évaluation
- Diverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesDocument2 pagesDiverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesleonPas encore d'évaluation
- Tribes Without RulersDocument25 pagesTribes Without Rulersgulistan.alpaslan8134100% (1)
- Sony x300 ManualDocument8 pagesSony x300 ManualMarcosCanforaPas encore d'évaluation
- P3 Past Papers Model AnswersDocument211 pagesP3 Past Papers Model AnswersEyad UsamaPas encore d'évaluation
- Logistic RegressionDocument7 pagesLogistic RegressionShashank JainPas encore d'évaluation
- Template Budget ProposalDocument4 pagesTemplate Budget ProposalimamPas encore d'évaluation
- Darkle Slideshow by SlidesgoDocument53 pagesDarkle Slideshow by SlidesgoADITI GUPTAPas encore d'évaluation
- Hitachi Vehicle CardDocument44 pagesHitachi Vehicle CardKieran RyanPas encore d'évaluation
- CSWIP-WP-19-08 Review of Welding Procedures 2nd Edition February 2017Document6 pagesCSWIP-WP-19-08 Review of Welding Procedures 2nd Edition February 2017oberai100% (1)
- IPA Smith Osborne21632Document28 pagesIPA Smith Osborne21632johnrobertbilo.bertilloPas encore d'évaluation
- Leveriza Heights SubdivisionDocument4 pagesLeveriza Heights SubdivisionTabordan AlmaePas encore d'évaluation
- Dec 2-7 Week 4 Physics DLLDocument3 pagesDec 2-7 Week 4 Physics DLLRicardo Acosta Subad100% (1)
- Atoma Amd Mol&Us CCTK) : 2Nd ErmDocument4 pagesAtoma Amd Mol&Us CCTK) : 2Nd ErmjanviPas encore d'évaluation
- End-Of-Chapter Answers Chapter 7 PDFDocument12 pagesEnd-Of-Chapter Answers Chapter 7 PDFSiphoPas encore d'évaluation
- CL Honours Report NamanDocument11 pagesCL Honours Report NamanNaman VermaPas encore d'évaluation
- CE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Document6 pagesCE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Angelice Alliah De la CruzPas encore d'évaluation
- Use of The Internet in EducationDocument23 pagesUse of The Internet in EducationAlbert BelirPas encore d'évaluation
- Plan Lectie Clasa 5 D HaineDocument5 pagesPlan Lectie Clasa 5 D HaineCristina GrapinoiuPas encore d'évaluation
- KRAS QC12K-4X2500 Hydraulic Shearing Machine With E21S ControllerDocument3 pagesKRAS QC12K-4X2500 Hydraulic Shearing Machine With E21S ControllerJohan Sneider100% (1)