Vous aimerez peut-être aussi
- Lecture 1 Introduction To Information TechnologyDocument40 pagesLecture 1 Introduction To Information TechnologyZain Raza100% (7)
- Data Analytics Full Time Bootcamp PDFDocument11 pagesData Analytics Full Time Bootcamp PDFAdrian Hurtado de Mendoza100% (1)
- Fmri Data Analysis MatlabDocument18 pagesFmri Data Analysis MatlaboumeiganPas encore d'évaluation
- Nurbs PythonDocument92 pagesNurbs PythonFutui MasaPas encore d'évaluation
- RT-RRT : A Real-Time Path Planning Algorithm Based On RRT : Kourosh Naderi Joose Rajam Aki Perttu H Am Al AinenDocument6 pagesRT-RRT : A Real-Time Path Planning Algorithm Based On RRT : Kourosh Naderi Joose Rajam Aki Perttu H Am Al AinenPramod KumarPas encore d'évaluation
- Robot Lab Path PlanningDocument94 pagesRobot Lab Path PlanningKevin CarvalhoPas encore d'évaluation
- AI Search STDDocument127 pagesAI Search STDYogesh KumbhalkarPas encore d'évaluation
- Path Formation For Leader-Follower Non-Holonomic Multi Mobile RobotsDocument15 pagesPath Formation For Leader-Follower Non-Holonomic Multi Mobile RobotsAkmalPas encore d'évaluation
- Algo Lecture01Document66 pagesAlgo Lecture01Noor FatimaPas encore d'évaluation
- Algoritma Untuk Tataletak FasilitasDocument53 pagesAlgoritma Untuk Tataletak FasilitasgadoPas encore d'évaluation
- Robot Lab Path PlanningDocument94 pagesRobot Lab Path Planningcesar.arismendi615Pas encore d'évaluation
- Lecture3 SearchingDocument45 pagesLecture3 SearchingRisinu WijesinghePas encore d'évaluation
- Chapter13 PlanningDocument48 pagesChapter13 PlanningUddalak Banerjee100% (1)
- Concepts in Robot Motion Planning - Path Planning MethodsDocument9 pagesConcepts in Robot Motion Planning - Path Planning MethodsAlex HatPas encore d'évaluation
- Artificial Intelligence Lecture No. 6Document30 pagesArtificial Intelligence Lecture No. 6Syed SamiPas encore d'évaluation
- Chapter Three: Lecture 1: Solving Problems by Searching and Constraint Satisfaction ProblemDocument53 pagesChapter Three: Lecture 1: Solving Problems by Searching and Constraint Satisfaction Problemashenafi endalePas encore d'évaluation
- Miniature Rotorcraft As Aerial Explorers: Ilan Kroo, Peter Kunz Dept. of Aero/Astro Stanford UniversityDocument43 pagesMiniature Rotorcraft As Aerial Explorers: Ilan Kroo, Peter Kunz Dept. of Aero/Astro Stanford UniversityMathewJohnPas encore d'évaluation
- 2011 0006.advanced EvolutionaryDocument76 pages2011 0006.advanced EvolutionaryKARANPas encore d'évaluation
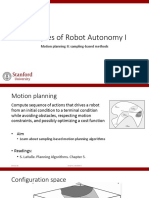
- Principles of Robot Autonomy I: Motion Planning II: Sampling-Based MethodsDocument29 pagesPrinciples of Robot Autonomy I: Motion Planning II: Sampling-Based MethodsratjerryPas encore d'évaluation
- Literature Review of Newspaper IndustryDocument10 pagesLiterature Review of Newspaper IndustryVikram Pratap SinghPas encore d'évaluation
- Unit 2 AIDocument107 pagesUnit 2 AIAbhishek GuptaPas encore d'évaluation
- AStar 1Document11 pagesAStar 1truhtPas encore d'évaluation
- Analytical DesignDocument38 pagesAnalytical Designsawyl AHAMEFULA MBAPas encore d'évaluation
- Artificial Intelligence: Dr. Md. Nasim AdnanDocument61 pagesArtificial Intelligence: Dr. Md. Nasim AdnanshohanPas encore d'évaluation
- Principles of Robot Autonomy I: Motion Planning I: Graph Search MethodsDocument33 pagesPrinciples of Robot Autonomy I: Motion Planning I: Graph Search MethodsratjerryPas encore d'évaluation
- Chapter 3 - Solving Problems by Searching ConciseDocument67 pagesChapter 3 - Solving Problems by Searching ConciseSamiPas encore d'évaluation
- Motion Planning & Robot PlanningDocument98 pagesMotion Planning & Robot PlanningAshPas encore d'évaluation
- Research PostersDocument32 pagesResearch PostersKEVIN ALEXANDER ESTRADA PALIZPas encore d'évaluation
- Unit 1 - QTDocument22 pagesUnit 1 - QTalexfurnasePas encore d'évaluation
- Lecture 5 - Algorithm Design TechniquesDocument21 pagesLecture 5 - Algorithm Design TechniquesWesty FxPas encore d'évaluation
- S Da Video Lectures Lecf OurDocument35 pagesS Da Video Lectures Lecf OurZalmi KhanPas encore d'évaluation
- Lec 2Document64 pagesLec 2Awais AliPas encore d'évaluation
- ANSYS CFX Solving I PDFDocument128 pagesANSYS CFX Solving I PDFAshish Prasannan KalayilPas encore d'évaluation
- III It Ci Unit 1Document28 pagesIII It Ci Unit 15049 preethi BaskaranPas encore d'évaluation
- Structures and Strategies For State Space SearchDocument49 pagesStructures and Strategies For State Space SearchmovycePas encore d'évaluation
- Ie335 or IntroDocument82 pagesIe335 or IntrotyfnpkrPas encore d'évaluation
- The Forgotten Factor: FACTS: On Performance Evaluation and Its Dependence On WorkloadsDocument78 pagesThe Forgotten Factor: FACTS: On Performance Evaluation and Its Dependence On WorkloadsMikhail KhomchakPas encore d'évaluation
- Robotics and Sensor Networks:: Coverage, Localization and Mobility Kostas BekrisDocument35 pagesRobotics and Sensor Networks:: Coverage, Localization and Mobility Kostas Bekrisharikiran3285Pas encore d'évaluation
- Multi Robot Path Planning For WarehouseDocument13 pagesMulti Robot Path Planning For WarehouseAnkur BhargavaPas encore d'évaluation
- CURSO IDS-330 INTELIGENCIA ARTIFICIAL-PARTE III - Solucià N de Problemas de SearchingDocument28 pagesCURSO IDS-330 INTELIGENCIA ARTIFICIAL-PARTE III - Solucià N de Problemas de Searchingperla moreno de jesusPas encore d'évaluation
- Layout Planning Models and Design Algorithms: Chapter#06Document40 pagesLayout Planning Models and Design Algorithms: Chapter#06Discord YtPas encore d'évaluation
- Algorithm Sequence of Unambiguous Instructions For Solving A Problem Finite Amount of TimeDocument4 pagesAlgorithm Sequence of Unambiguous Instructions For Solving A Problem Finite Amount of TimeShivang AgarwalPas encore d'évaluation
- Unit Iii Models and TheoriesDocument90 pagesUnit Iii Models and TheoriesgopivrajanPas encore d'évaluation
- Quantitative & Qualitative Formulation of Facility Layout ProblemsDocument39 pagesQuantitative & Qualitative Formulation of Facility Layout ProblemsSudheesh SPas encore d'évaluation
- Fayyaz Awan: Algorithms and Data StructuresDocument29 pagesFayyaz Awan: Algorithms and Data StructuresNoman AliPas encore d'évaluation
- Mobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement LearningDocument8 pagesMobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement LearningVarun AgarwalPas encore d'évaluation
- OR UNIT I UmaDocument51 pagesOR UNIT I UmaSanal EkPas encore d'évaluation
- Main Subject of Course: Methods of Planning: (Design) of Communication/computer NetworksDocument32 pagesMain Subject of Course: Methods of Planning: (Design) of Communication/computer Networksvinayrao92Pas encore d'évaluation
- 5 - Mathematical Models For Plant Layout IIDocument27 pages5 - Mathematical Models For Plant Layout IIhandsomefa22Pas encore d'évaluation
- MST 2 Study MaterialDocument57 pagesMST 2 Study MaterialjayPas encore d'évaluation
- Morrf: Sampling-Based Multi-Objective Motion PlanningDocument7 pagesMorrf: Sampling-Based Multi-Objective Motion PlanningKetan RsPas encore d'évaluation
- Lecture 1Document66 pagesLecture 1trivaPas encore d'évaluation
- Metric Path PlanningDocument18 pagesMetric Path Planningtp5606Pas encore d'évaluation
- Search-Based Planning For Manipulation With Motion PrimitivesDocument7 pagesSearch-Based Planning For Manipulation With Motion PrimitivesTales MarquesPas encore d'évaluation
- A Survey On Vehicle Routing Problems: The Vehicle Routing Problem With Time Windows and The Capacitated Vehicle Routing ProblemDocument5 pagesA Survey On Vehicle Routing Problems: The Vehicle Routing Problem With Time Windows and The Capacitated Vehicle Routing ProblemJoshua McDonaghPas encore d'évaluation
- Overview of Robotics Motion PlanningDocument7 pagesOverview of Robotics Motion PlanningAyya Durai100% (1)
- Introduction To Computer Simulation of Physical Systems (Lecture 1)Document63 pagesIntroduction To Computer Simulation of Physical Systems (Lecture 1)BenPas encore d'évaluation
- Pso PPT FDocument30 pagesPso PPT FSasmita moharanaPas encore d'évaluation
- Parallel DFS and BFSDocument35 pagesParallel DFS and BFSGeeta MeenaPas encore d'évaluation
- CS702 Handouts Lecture 1Document5 pagesCS702 Handouts Lecture 1Vladimir DespotovicPas encore d'évaluation
- Network Performance Measurement and AnalysisDocument8 pagesNetwork Performance Measurement and AnalysisAdhiyamanPownraj100% (1)
- Facility LayoutDocument64 pagesFacility Layoutabdelghani cherkaouiPas encore d'évaluation
- Lecture06 Informed Search (Part 2)Document34 pagesLecture06 Informed Search (Part 2)Dream MakerPas encore d'évaluation
- Computational Geometry: Exploring Geometric Insights for Computer VisionD'EverandComputational Geometry: Exploring Geometric Insights for Computer VisionPas encore d'évaluation
- 10 M Crop Type Mapping Using Sentinel-2 Reflectance and 30 M Cropland Data Layer ProductDocument16 pages10 M Crop Type Mapping Using Sentinel-2 Reflectance and 30 M Cropland Data Layer ProductJasón De EleaPas encore d'évaluation
- Coffee Crop MappingDocument131 pagesCoffee Crop MappingJasón De EleaPas encore d'évaluation
- Planning To Grasp and Position An Object For Forceful Human-Robot CollaborationDocument4 pagesPlanning To Grasp and Position An Object For Forceful Human-Robot CollaborationJasón De EleaPas encore d'évaluation
- CIM Practica 5 Documento Simulink PLC CoderDocument252 pagesCIM Practica 5 Documento Simulink PLC CoderJasón De EleaPas encore d'évaluation
- Friedrich1996 Article RobotProgrammingByDemonstratioDocument27 pagesFriedrich1996 Article RobotProgrammingByDemonstratioJasón De EleaPas encore d'évaluation
- Merlin ThesesDocument42 pagesMerlin ThesesJasón De EleaPas encore d'évaluation
- Trajectory Planning For Robot ManipulatorsDocument61 pagesTrajectory Planning For Robot ManipulatorsJasón De EleaPas encore d'évaluation
- FT232R USB UART Recovery InstructionDocument12 pagesFT232R USB UART Recovery InstructionJasón De EleaPas encore d'évaluation
- Top SAS Interview Question and AnswerDocument10 pagesTop SAS Interview Question and AnswerRetika JaiswalPas encore d'évaluation
- Usb SettingDocument18 pagesUsb SettingCowpsPas encore d'évaluation
- Gams IdeDocument39 pagesGams IdeArmando PeregrinoPas encore d'évaluation
- Infosys Placement PaperDocument84 pagesInfosys Placement PaperDevops EnvPas encore d'évaluation
- Multiclass Classification Method Based On Deep Learning For Leaf Identification For FarmersDocument4 pagesMulticlass Classification Method Based On Deep Learning For Leaf Identification For FarmersInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- 15 QuesDocument4 pages15 QuesSAKTHIVELPas encore d'évaluation
- Command Lua ReferenceDocument43 pagesCommand Lua ReferenceΣπύρος ΑνδρεάτοςPas encore d'évaluation
- 2016-2017 Bca Final Year Projects ListDocument6 pages2016-2017 Bca Final Year Projects ListIgeeks Technologies,BangalorePas encore d'évaluation
- Railway Reservation SystemDocument3 pagesRailway Reservation Systemsb_rameshbabuPas encore d'évaluation
- Question Bank For Customer Relationship Management PaperDocument1 pageQuestion Bank For Customer Relationship Management PaperVinay SinghPas encore d'évaluation
- Computer Operating Procedures Manual For WebSAMS 2.0 - English - Version 1.1Document79 pagesComputer Operating Procedures Manual For WebSAMS 2.0 - English - Version 1.1shilratnaPas encore d'évaluation
- 68k Chips FaqDocument29 pages68k Chips Faqgrga_grgur2082Pas encore d'évaluation
- Design and Analysis of AlgorithmsDocument37 pagesDesign and Analysis of AlgorithmsSwapnil agrawalPas encore d'évaluation
- JSP TutorialDocument16 pagesJSP Tutorialvilasmenon100% (2)
- 1.1-3 Computer System DesignDocument23 pages1.1-3 Computer System DesignGerald E BaculnaPas encore d'évaluation
- Hacking Guide SR 4eDocument1 pageHacking Guide SR 4eICEMEDPas encore d'évaluation
- DBE Unit 1Document175 pagesDBE Unit 1gully boyPas encore d'évaluation
- Examen 01 Java OracleDocument66 pagesExamen 01 Java Oracleivanrod74Pas encore d'évaluation
- ECE 457 Course Synopsis Computational Intelligence: Fuzzy Logic and Neural Networks FundamentalsDocument1 pageECE 457 Course Synopsis Computational Intelligence: Fuzzy Logic and Neural Networks FundamentalsphoebezzPas encore d'évaluation
- Shutdown Command Via Command PromptDocument2 pagesShutdown Command Via Command PromptmobilecrackersPas encore d'évaluation
- MDA AnthologyDocument720 pagesMDA AnthologyRamineni Praveen Kumar100% (1)
- 2012Document7 pages2012Avijit PaulPas encore d'évaluation
- ARM Cortex Portfolio - Public Version - V7Document4 pagesARM Cortex Portfolio - Public Version - V7Aaron FloresPas encore d'évaluation
- Cybersecurity For Medical Devices: Three Threads IntertwinedDocument23 pagesCybersecurity For Medical Devices: Three Threads IntertwinedGuevarita GuevaritaPas encore d'évaluation
- Installing SolidWorks 2013 On Your PC Jan 2014Document5 pagesInstalling SolidWorks 2013 On Your PC Jan 2014Hamza FayyazPas encore d'évaluation
- MDFT PDFDocument4 pagesMDFT PDFMayank GangwarPas encore d'évaluation