Vous aimerez peut-être aussi
- Moment Connection - TablesDocument95 pagesMoment Connection - Tablescactushito100% (1)
- NASGRO v6.2 Release Notes: NASFLA Additions and ChangesDocument22 pagesNASGRO v6.2 Release Notes: NASFLA Additions and ChangesIgor LiMa ChavesPas encore d'évaluation
- Lingap Oct2001 Update 3398Document21 pagesLingap Oct2001 Update 3398Oreste PrincipePas encore d'évaluation
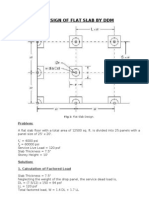
- Design of Flat Slab by DDMDocument16 pagesDesign of Flat Slab by DDMNafees Imitaz100% (1)
- Post BucklingDocument14 pagesPost BucklingthaoPas encore d'évaluation
- Fatigue of Threaded Fasteners: Alex Hudgins Brad James, FasmDocument5 pagesFatigue of Threaded Fasteners: Alex Hudgins Brad James, Fasmyh1.yuPas encore d'évaluation
- Buckling and Postbuckling Analysis of A CFRP Stiffened Panel For ADocument7 pagesBuckling and Postbuckling Analysis of A CFRP Stiffened Panel For AOSCARDELTAPas encore d'évaluation
- Gordon Kelly - 2004 - Joining of Carbon Fibre Reinforced Plastics For Automotive ApplicationsDocument36 pagesGordon Kelly - 2004 - Joining of Carbon Fibre Reinforced Plastics For Automotive ApplicationsDaniel MarquesPas encore d'évaluation
- Milling Attachment With 3 FunctionsDocument3 pagesMilling Attachment With 3 FunctionsKarthickPas encore d'évaluation
- MD Nastran Demonstration Problems 2010Document1 347 pagesMD Nastran Demonstration Problems 2010Dan WolfPas encore d'évaluation
- Abaqus Fem Analysis of The Postbuckling Behaviour of Composite PDF E1094Document4 pagesAbaqus Fem Analysis of The Postbuckling Behaviour of Composite PDF E1094FabricioPas encore d'évaluation
- Hybrid and 2D DICDocument13 pagesHybrid and 2D DICNguyễn Văn ThườngPas encore d'évaluation
- BoltmodelnastranbearingDocument24 pagesBoltmodelnastranbearingcbryant1990Pas encore d'évaluation
- Damage TypesDocument15 pagesDamage TypesĐoàn Đình ĐôngPas encore d'évaluation
- Cutting Force MarbleDocument8 pagesCutting Force MarbleGhiyath WaznehPas encore d'évaluation
- AMTE 214-2B Fail Safe: Submitted By: Rodriguez, John Mark MDocument6 pagesAMTE 214-2B Fail Safe: Submitted By: Rodriguez, John Mark MJohn Mark RodriguezPas encore d'évaluation
- Defense Technical Information Center Compilation Part NoticeDocument20 pagesDefense Technical Information Center Compilation Part NoticeBala KrishnanPas encore d'évaluation
- Postbuckling and Collapse AnalysisDocument8 pagesPostbuckling and Collapse AnalysisAtsis Papadopoulos100% (1)
- Modul-Stiffness MethodDocument18 pagesModul-Stiffness MethodMohamad Zahir RazakPas encore d'évaluation
- Abaqus Answers Spring 1997Document4 pagesAbaqus Answers Spring 1997zmchen100% (1)
- FullScaleTestingER JorgensenDocument30 pagesFullScaleTestingER JorgensenBrian PintoPas encore d'évaluation
- Imperfection Sensitivity of Plate Girder Webs Under Patch LoadingDocument6 pagesImperfection Sensitivity of Plate Girder Webs Under Patch LoadingAsdrubal AyestaránPas encore d'évaluation
- Damage Tolerance Test Method Development For Sandwich Composites-AdamsDocument23 pagesDamage Tolerance Test Method Development For Sandwich Composites-AdamsAngel LagrañaPas encore d'évaluation
- Repair Types, Procedures - Part I: Mohan M. Ratwani, Ph. DDocument23 pagesRepair Types, Procedures - Part I: Mohan M. Ratwani, Ph. DOho My worldPas encore d'évaluation
- Simulating The Impact Behaviour of CompositeDocument15 pagesSimulating The Impact Behaviour of CompositeSchmetterling TraurigPas encore d'évaluation
- Modal FRA With NastranDocument13 pagesModal FRA With Nastran5colourbalaPas encore d'évaluation
- Aluminium Adhesive JointDocument5 pagesAluminium Adhesive JointJournalNX - a Multidisciplinary Peer Reviewed JournalPas encore d'évaluation
- Aeromat 2007 - MMPDS - 060407Document29 pagesAeromat 2007 - MMPDS - 060407luism2743Pas encore d'évaluation
- 11.1.1 Topology Optimization of An Automotive Control Arm Products: Abaqus/Standard Abaqus/CAEDocument5 pages11.1.1 Topology Optimization of An Automotive Control Arm Products: Abaqus/Standard Abaqus/CAEIrandokht NikshabaniPas encore d'évaluation
- Advanced Failure Criteria CompositesDocument12 pagesAdvanced Failure Criteria CompositesrichardjoliverPas encore d'évaluation
- 2943-Port & Valve TimingDocument1 page2943-Port & Valve TimingVinoth Kumar VinsPas encore d'évaluation
- Workshop 11 PDFDocument22 pagesWorkshop 11 PDFJohan ConradiePas encore d'évaluation
- FRANC3D V7.4 Users GuideDocument191 pagesFRANC3D V7.4 Users GuidesrashmiiiscPas encore d'évaluation
- A Symmary of Diagonal Tension Part 1 Methods and AnalysisDocument137 pagesA Symmary of Diagonal Tension Part 1 Methods and AnalysisVesa RäisänenPas encore d'évaluation
- Nonlinear Total Strain Vs Linear Strai1Document32 pagesNonlinear Total Strain Vs Linear Strai1Dasaka BrahmendraPas encore d'évaluation
- George Andrew Analysis of DA40Document36 pagesGeorge Andrew Analysis of DA40Trevor Leon100% (1)
- Making Efficient Connections With RBE2 RBE3 Constraint Equations and CBUSH ElementsDocument24 pagesMaking Efficient Connections With RBE2 RBE3 Constraint Equations and CBUSH Elementsjejep4Pas encore d'évaluation
- 2004-03-01 Actual vs. Effective Involute Tooth SizeDocument6 pages2004-03-01 Actual vs. Effective Involute Tooth Sizebee140676Pas encore d'évaluation
- WingsDocument28 pagesWingsnakul_desh13Pas encore d'évaluation
- CBUSHDocument4 pagesCBUSHBita MohajerniaPas encore d'évaluation
- AMTS-Composite Design - 2Document23 pagesAMTS-Composite Design - 2benPas encore d'évaluation
- AC 25.1529-1A Instructions For Continued Airworthiness of Structural Repairs On Transport AirplanesDocument7 pagesAC 25.1529-1A Instructions For Continued Airworthiness of Structural Repairs On Transport AirplanesLadislao PazmanyPas encore d'évaluation
- Hyper SizerDocument16 pagesHyper SizerKamlesh Dalavadi100% (1)
- OffsetDocument22 pagesOffsetvinandaraPas encore d'évaluation
- Workshop 14 Radiation Enclosures: WS14-1 NAS104, Workshop 14, March 2004 2004 MSC - Software CorporationDocument24 pagesWorkshop 14 Radiation Enclosures: WS14-1 NAS104, Workshop 14, March 2004 2004 MSC - Software Corporationaiyubi2Pas encore d'évaluation
- Agard Ag 304Document68 pagesAgard Ag 304greatsteelPas encore d'évaluation
- Brake Squeal AnalysisDocument10 pagesBrake Squeal AnalysisDan WolfPas encore d'évaluation
- Nonlinear Gap Elements With Coincident NodesDocument12 pagesNonlinear Gap Elements With Coincident Nodesaiyubi2100% (1)
- Behaviour of Sleeved Bolt Connections in Precast Concrete FramesDocument246 pagesBehaviour of Sleeved Bolt Connections in Precast Concrete Framespavan2deepuakiPas encore d'évaluation
- Click Bond Product Guide CD 720 120 2 EnglishDocument24 pagesClick Bond Product Guide CD 720 120 2 Englishjelliott48278Pas encore d'évaluation
- Frame Surface Model AnalysisDocument37 pagesFrame Surface Model AnalysisManasses juniorPas encore d'évaluation
- Boeing Hat Section StudyDocument17 pagesBoeing Hat Section StudyPrasanna KumarPas encore d'évaluation
- 5 Mscfatigue TutorDocument24 pages5 Mscfatigue TutorFadzrul Hisyam BadarudinPas encore d'évaluation
- NASTRAN/PATRAN Intro ManualDocument248 pagesNASTRAN/PATRAN Intro Manualjarzola11Pas encore d'évaluation
- AC 25.571-1D DTA GuidanceDocument41 pagesAC 25.571-1D DTA GuidanceRickPas encore d'évaluation
- Teori6 Aircraft AgingDocument27 pagesTeori6 Aircraft AgingRifki FirnandoTPPU 1Pas encore d'évaluation
- Cb750k EngineDocument57 pagesCb750k Enginepaul balfePas encore d'évaluation
- Modern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989D'EverandModern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989J. E. MottersheadPas encore d'évaluation
- Resistance and Deformation of Solid Media: Pergamon Unified Engineering SeriesD'EverandResistance and Deformation of Solid Media: Pergamon Unified Engineering SeriesPas encore d'évaluation
- The Strength of Materials: A Treatise on the Theory of Stress Calculations for EngineersD'EverandThe Strength of Materials: A Treatise on the Theory of Stress Calculations for EngineersPas encore d'évaluation
- Fracture and Fatigue: Composite Materials, Vol. 5D'EverandFracture and Fatigue: Composite Materials, Vol. 5Pas encore d'évaluation
- Water HammerDocument52 pagesWater HammerNidas SameeraPas encore d'évaluation
- Earth'S Orbit Path Around The Sun EssayDocument3 pagesEarth'S Orbit Path Around The Sun EssaySebastián VegaPas encore d'évaluation
- Module 2 Physical and Mechanical Properties of Rocks 2Document64 pagesModule 2 Physical and Mechanical Properties of Rocks 2Flora FigueredoPas encore d'évaluation
- 6 Waves SDocument52 pages6 Waves SRuddyMartiniPas encore d'évaluation
- SHS50 X 50 X 4Document4 pagesSHS50 X 50 X 4Salvatore ShwPas encore d'évaluation
- Elements of Practical Aerodynamics - Bradley Jones PDFDocument401 pagesElements of Practical Aerodynamics - Bradley Jones PDFJayson BagaPas encore d'évaluation
- 06) UB254x146x43TOUB356x171x51 Beam To Beam End PlateDocument121 pages06) UB254x146x43TOUB356x171x51 Beam To Beam End PlateAsaru DeenPas encore d'évaluation
- TRM 9Document72 pagesTRM 9PiousPas encore d'évaluation
- Numerical Methods in Quantum MechanicsDocument105 pagesNumerical Methods in Quantum MechanicsSagar SharmaPas encore d'évaluation
- Short Col DesignDocument17 pagesShort Col DesignBhavin ShahPas encore d'évaluation
- Descriptions of Fluid FlowsDocument2 pagesDescriptions of Fluid FlowsdarshanPas encore d'évaluation
- LP Phy Sci Q2-M6 (W2)Document3 pagesLP Phy Sci Q2-M6 (W2)MARIA DINA TAYACTACPas encore d'évaluation
- General Specification For Mass Flow MeterDocument138 pagesGeneral Specification For Mass Flow MeterRenalyn TorioPas encore d'évaluation
- Automatic Control, Basic Course FRTF05: ReglerteknikDocument6 pagesAutomatic Control, Basic Course FRTF05: ReglerteknikAl-ShukaPas encore d'évaluation
- Indian Association of Physics Teachers: National Graduate Physics Examination 2020Document11 pagesIndian Association of Physics Teachers: National Graduate Physics Examination 2020PRIYANKAPas encore d'évaluation
- VCE Unit 1 Physics Notes - Temperature and HeatDocument2 pagesVCE Unit 1 Physics Notes - Temperature and Heatjulia kendallPas encore d'évaluation
- Assignment 1 - Unit 1Document2 pagesAssignment 1 - Unit 1Kiran Babu100% (1)
- Static and Dynamic Analysis of Tee Beam Bridge DeckDocument4 pagesStatic and Dynamic Analysis of Tee Beam Bridge DeckfarrukhPas encore d'évaluation
- 1 s2.0 S0149197018301525 MainDocument10 pages1 s2.0 S0149197018301525 Mainait hssainPas encore d'évaluation
- Residential Structural Design Design of Slab 1702058853Document30 pagesResidential Structural Design Design of Slab 1702058853Gys AnamaliPas encore d'évaluation
- Eutectic Solution PDFDocument2 pagesEutectic Solution PDFMelissaPas encore d'évaluation
- GasLiftValveDesign SI UnitsDocument10 pagesGasLiftValveDesign SI UnitsatilsPas encore d'évaluation
- CRTICAL Force and Moment Outputs From SAP2000: SLS ULS Bending Moment (M), Shear Force (V) & Direct Tension (T)Document4 pagesCRTICAL Force and Moment Outputs From SAP2000: SLS ULS Bending Moment (M), Shear Force (V) & Direct Tension (T)risrizPas encore d'évaluation
- 5 2018 02 21!10 28 49 PMDocument9 pages5 2018 02 21!10 28 49 PMJoseph James MedinaPas encore d'évaluation
- Surge Analysis and Design - Case StudyDocument10 pagesSurge Analysis and Design - Case StudyRaghuveer Rao PallepatiPas encore d'évaluation
- Handling Robot With Top Rated Loading Capacity: 700kg PayloadDocument2 pagesHandling Robot With Top Rated Loading Capacity: 700kg PayloadXanti Zabala Da RosaPas encore d'évaluation
- Orthogonal and Diagonal Grid Slabs Analysis Using E TABSDocument10 pagesOrthogonal and Diagonal Grid Slabs Analysis Using E TABSEditor IJTSRDPas encore d'évaluation
- 4th-Qrtr-dll Gr.-9Document29 pages4th-Qrtr-dll Gr.-9harold carbonelPas encore d'évaluation