Vous aimerez peut-être aussi
- Example of 2D ConvolutionDocument5 pagesExample of 2D ConvolutionAnisha AgarwalPas encore d'évaluation
- Convolution in 1D and 2DDocument18 pagesConvolution in 1D and 2DNatarajanSPas encore d'évaluation
- Ec8093 - Unit 4Document51 pagesEc8093 - Unit 4Santhosh PaPas encore d'évaluation
- 2021 EE769 Tutorial Sheet 1Document4 pages2021 EE769 Tutorial Sheet 1raktionPas encore d'évaluation
- DSD Open Ended TaskDocument5 pagesDSD Open Ended TaskswathiPas encore d'évaluation
- Lab Report Experiment 3Document3 pagesLab Report Experiment 3Jake DysonPas encore d'évaluation
- Chapter-5.PDF Charan LangtonDocument32 pagesChapter-5.PDF Charan Langtonumair rasheedPas encore d'évaluation
- Design and Implementation of FIR Filter Based On Dual Quality Compressor Based Multipliers With MFADocument24 pagesDesign and Implementation of FIR Filter Based On Dual Quality Compressor Based Multipliers With MFAKushal MalhotraPas encore d'évaluation
- Slides For Chapter 17: Distributed Transactions: Distributed Systems: Concepts and DesignDocument24 pagesSlides For Chapter 17: Distributed Transactions: Distributed Systems: Concepts and DesignMuhammad FarooqPas encore d'évaluation
- Final: CS 188 Fall 2013 Introduction To Artificial IntelligenceDocument23 pagesFinal: CS 188 Fall 2013 Introduction To Artificial IntelligenceTryerPas encore d'évaluation
- Assignment 2Document1 pageAssignment 2Zarnigar AltafPas encore d'évaluation
- Impatt DiodeDocument16 pagesImpatt DiodeTuhin Dutta100% (4)
- Chapter 11 Representation and DescriptionDocument111 pagesChapter 11 Representation and DescriptionVathana Dennish100% (1)
- Huffman CodingDocument16 pagesHuffman CodingarupsilPas encore d'évaluation
- Lecture35 Ch12 CoherenceDocument25 pagesLecture35 Ch12 Coherencepavan457Pas encore d'évaluation
- IJAMSS - Group Action On Picture Fuzzy Soft G-Modules - 1 - 1Document18 pagesIJAMSS - Group Action On Picture Fuzzy Soft G-Modules - 1 - 1Impact JournalsPas encore d'évaluation
- DA6210 Computer Graphics Lab ManualDocument33 pagesDA6210 Computer Graphics Lab ManualSarthak Singh ChandelPas encore d'évaluation
- Data Structures For Computer GraphicsDocument10 pagesData Structures For Computer Graphicsr2d23Pas encore d'évaluation
- Reed-Muller Codes: Sebastian Raaphorst Carleton University May 9, 2003Document20 pagesReed-Muller Codes: Sebastian Raaphorst Carleton University May 9, 2003jayant5253100% (1)
- 3d Transformation CoordinatesDocument9 pages3d Transformation CoordinatesShalu OjhaPas encore d'évaluation
- 1 Programming Model (Algorithms 1.1)Document10 pages1 Programming Model (Algorithms 1.1)HarshaSharmaPas encore d'évaluation
- GraphsDocument29 pagesGraphsVanessaPas encore d'évaluation
- Image Enchancement in Spatial DomainDocument117 pagesImage Enchancement in Spatial DomainMalluri LokanathPas encore d'évaluation
- (EIE529) Assignment 3Document3 pages(EIE529) Assignment 3JefferyMakPas encore d'évaluation
- DFT Domain ImageDocument65 pagesDFT Domain ImageManjunath AchariPas encore d'évaluation
- Math 31 IB HL - SL (Areas - Volumes) With AnswersDocument4 pagesMath 31 IB HL - SL (Areas - Volumes) With AnswersKabir MehtaPas encore d'évaluation
- (Winter 2021) : CS231A: Computer Vision, From 3D Reconstruction To Recognition Homework #0 Due: Sunday, January 17Document2 pages(Winter 2021) : CS231A: Computer Vision, From 3D Reconstruction To Recognition Homework #0 Due: Sunday, January 17Nono Nono100% (1)
- Chapter 11: Representation & Description Digital Image ProcessingDocument29 pagesChapter 11: Representation & Description Digital Image ProcessingArvind LalPas encore d'évaluation
- NMC Handout - 3Document17 pagesNMC Handout - 3NIKHIL NIKHIPas encore d'évaluation
- Enhancement in Spatial DomainDocument25 pagesEnhancement in Spatial DomainKumarPatraPas encore d'évaluation
- EE530 Image Processing Project #2: 20215259 Kangmin Lee 2023.04.20Document13 pagesEE530 Image Processing Project #2: 20215259 Kangmin Lee 2023.04.20이강민Pas encore d'évaluation
- Dip Manual PDFDocument60 pagesDip Manual PDFHaseeb MughalPas encore d'évaluation
- Saveetha Institute of Medical and Technical Sciences: Unit V Plotting and Regression Analysis in RDocument63 pagesSaveetha Institute of Medical and Technical Sciences: Unit V Plotting and Regression Analysis in RMuzakir Laikh KhanPas encore d'évaluation
- Unit - 5 Image Enhancement in Spatial DomainDocument26 pagesUnit - 5 Image Enhancement in Spatial DomainJeethan100% (1)
- Computer Graphics & Multimedia Lab (Etcs-257) : Experiment 1Document64 pagesComputer Graphics & Multimedia Lab (Etcs-257) : Experiment 1011S6Amit PandeyPas encore d'évaluation
- Split and Non Split Two Domination Numbers of Semi Total - Point GraphDocument9 pagesSplit and Non Split Two Domination Numbers of Semi Total - Point GraphInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Affine CipherDocument3 pagesAffine CipheramitpandaPas encore d'évaluation
- Basics of Image ProcessingDocument38 pagesBasics of Image ProcessingKarthick VijayanPas encore d'évaluation
- Understanding The Properties of 2-D DFT & IDFTDocument14 pagesUnderstanding The Properties of 2-D DFT & IDFTrotago6843Pas encore d'évaluation
- Ece411 - 3 - Dt-Lti SystemsDocument23 pagesEce411 - 3 - Dt-Lti SystemsMartine JimenezPas encore d'évaluation
- Static Condensation NotesDocument7 pagesStatic Condensation Notesanisha2007Pas encore d'évaluation
- Intro To GMTDocument32 pagesIntro To GMTNatacha DUROSEPas encore d'évaluation
- Image Processing and Pattern Recoginition Lab ManualDocument38 pagesImage Processing and Pattern Recoginition Lab ManualDeepa SPas encore d'évaluation
- FM Core Pure Exam C SolutionsDocument10 pagesFM Core Pure Exam C SolutionsdsfafasdPas encore d'évaluation
- Matlab CodeDocument3 pagesMatlab CodeBhavish ParkalaPas encore d'évaluation
- Ipcv Midsem Btech III-march 2017 1Document2 pagesIpcv Midsem Btech III-march 2017 1Shrijeet JainPas encore d'évaluation
- Unit 5Document27 pagesUnit 5jai geraPas encore d'évaluation
- Machine Learning 10-701 Final Exam May 5, 2015: Obvious Exceptions For Pacemakers and Hearing AidsDocument17 pagesMachine Learning 10-701 Final Exam May 5, 2015: Obvious Exceptions For Pacemakers and Hearing AidsNithinPas encore d'évaluation
- Final 2D Transformations Heran Baker NewDocument64 pagesFinal 2D Transformations Heran Baker NewImmensely IndianPas encore d'évaluation
- On Hands On R ProgrammingDocument30 pagesOn Hands On R ProgrammingS.B.L SRIRAMPas encore d'évaluation
- Digital Image Processing FileDocument26 pagesDigital Image Processing FileAviral ChaurasiaPas encore d'évaluation
- cs224n 2017 Notes3Document18 pagescs224n 2017 Notes3Du PhanPas encore d'évaluation
- Solved Problems: SolutionDocument52 pagesSolved Problems: SolutionRokhaya Diagne50% (2)
- (EIE529) Assignment 2Document3 pages(EIE529) Assignment 2JefferyMak100% (1)
- 6CS4-21 Digital Image Processing LAB PLAN 2022-23Document2 pages6CS4-21 Digital Image Processing LAB PLAN 2022-23Rishab MalikPas encore d'évaluation
- HE E Orce: John Montrym Henry Moreton NvidiaDocument11 pagesHE E Orce: John Montrym Henry Moreton NvidiajohnPas encore d'évaluation
- TI by OpenAIDocument4 pagesTI by OpenAITanankemPas encore d'évaluation
- Assignment III - Advanced CUDADocument12 pagesAssignment III - Advanced CUDABadajuanPas encore d'évaluation
- 3 Vol 15 No 1Document6 pages3 Vol 15 No 1alkesh.engPas encore d'évaluation
- A Study On Secret Image SharingDocument5 pagesA Study On Secret Image SharingIra Zahroh DamanikPas encore d'évaluation
- Andrewdate 13Document4 pagesAndrewdate 13Roshan RajuPas encore d'évaluation
- AOCVDocument21 pagesAOCVRoshan RajuPas encore d'évaluation
- RISC V Instruction SetDocument15 pagesRISC V Instruction SetRoshan RajuPas encore d'évaluation
- 222 - Using 211Document1 page222 - Using 211Roshan RajuPas encore d'évaluation
- MBIST Verification Best Practices ChallengesDocument6 pagesMBIST Verification Best Practices ChallengesRoshan RajuPas encore d'évaluation
- Cloud Computing BrochureDocument7 pagesCloud Computing BrochureRoshan RajuPas encore d'évaluation
- Ultra ScaleDocument13 pagesUltra ScaleRoshan RajuPas encore d'évaluation
- Random VariabilityDocument1 pageRandom VariabilityRoshan RajuPas encore d'évaluation
- Coping With RCL Interconnect Design HeadachesDocument1 pageCoping With RCL Interconnect Design HeadachesRoshan RajuPas encore d'évaluation
- NLDMDocument2 pagesNLDMRoshan RajuPas encore d'évaluation
- An Email To A Friend About The First Week After Starting Work in A New City - S Past N Prepositions of Place N TimeDocument2 pagesAn Email To A Friend About The First Week After Starting Work in A New City - S Past N Prepositions of Place N TimeRoshan RajuPas encore d'évaluation
- CGPT FilterDocument1 pageCGPT FilterRoshan RajuPas encore d'évaluation
- Sta InitDocument1 pageSta InitRoshan RajuPas encore d'évaluation
- UntitledDocument1 pageUntitledRoshan RajuPas encore d'évaluation
- Sta SyllabiDocument6 pagesSta SyllabiRoshan RajuPas encore d'évaluation
- Self-Interference Cancellation For LTE-Compatible Full-Duplex SystemsDocument6 pagesSelf-Interference Cancellation For LTE-Compatible Full-Duplex SystemsRoshan RajuPas encore d'évaluation
- Async Reset SynchronizationDocument2 pagesAsync Reset SynchronizationRoshan RajuPas encore d'évaluation
- UntitledDocument1 pageUntitledRoshan RajuPas encore d'évaluation
- Mbist SummaryDocument3 pagesMbist SummaryRoshan RajuPas encore d'évaluation
- Systemc NoteDocument1 pageSystemc NoteRoshan RajuPas encore d'évaluation
- Ch3.fault ModelingDocument53 pagesCh3.fault ModelingRoshan RajuPas encore d'évaluation
- SemiconductorDocument4 pagesSemiconductorRoshan RajuPas encore d'évaluation
- What'S The Difference Between Ipv4 and Ipv6?: Electronic DesignDocument6 pagesWhat'S The Difference Between Ipv4 and Ipv6?: Electronic DesignRoshan RajuPas encore d'évaluation
- Untitled 1Document62 pagesUntitled 1Roshan RajuPas encore d'évaluation
- When The Yogurt Took OverDocument3 pagesWhen The Yogurt Took OverRoshan RajuPas encore d'évaluation
- 13 Misc RoutingDocument37 pages13 Misc RoutingRoshan RajuPas encore d'évaluation
- Two's Complement: To Translate A Number in Binary Back To Base Ten, The Steps Are Reversed: 1110 1111 1 1110 1110Document3 pagesTwo's Complement: To Translate A Number in Binary Back To Base Ten, The Steps Are Reversed: 1110 1111 1 1110 1110Roshan RajuPas encore d'évaluation
- 1 Constraints Coding RulesDocument117 pages1 Constraints Coding RulesRoshan RajuPas encore d'évaluation
- Lect 9 Metastability-BlackschafferDocument26 pagesLect 9 Metastability-BlackschafferRoshan RajuPas encore d'évaluation
- Truth Tables For The Laws of BooleanDocument8 pagesTruth Tables For The Laws of BooleanRoshan RajuPas encore d'évaluation
- BQ 76952Document86 pagesBQ 76952Đạt Trần DoãnPas encore d'évaluation
- 5-Lighting System Inspection ReportDocument5 pages5-Lighting System Inspection ReportAldrin TaghapPas encore d'évaluation
- Autonomous Robot BookletDocument6 pagesAutonomous Robot BookletAnonymous L7XrxpeI1zPas encore d'évaluation
- Optical Sensor Product Guide-LrDocument60 pagesOptical Sensor Product Guide-LrLaurentiu IacobPas encore d'évaluation
- Characteristics of DC GeneratorsDocument6 pagesCharacteristics of DC Generatorssanket panchalPas encore d'évaluation
- 6.2-Linearity & SuperpositionDocument16 pages6.2-Linearity & SuperpositionTomashita ArenasPas encore d'évaluation
- Reliance Electric Psc7000 Operating Instructions Manual 84Document84 pagesReliance Electric Psc7000 Operating Instructions Manual 84Sinan OzaslanPas encore d'évaluation
- Physics SPM P2 AnalysisDocument2 pagesPhysics SPM P2 Analysisyudrea88Pas encore d'évaluation
- ECE 4101 Computer and Information Lab III - Experiment 2Document14 pagesECE 4101 Computer and Information Lab III - Experiment 2AHMAD ANWARPas encore d'évaluation
- Ats 380 Manual enDocument30 pagesAts 380 Manual enMuhammad Yasir IqbalPas encore d'évaluation
- As 30 Pattern ControllerDocument73 pagesAs 30 Pattern ControllershivanandaPas encore d'évaluation
- Flashing LEDDocument5 pagesFlashing LEDrashid sharifPas encore d'évaluation
- PN-Junction Diode Characteristics: Forward BiasDocument17 pagesPN-Junction Diode Characteristics: Forward BiasyasaslitPas encore d'évaluation
- Nee Lab ReportDocument21 pagesNee Lab ReportARJAYCHRISTOPHER MORALESPas encore d'évaluation
- Dga 517 BDocument184 pagesDga 517 BLudhriq HarbaPas encore d'évaluation
- Module 2 Notes - PSOCDocument24 pagesModule 2 Notes - PSOCpriyaPas encore d'évaluation
- Flexkraft AIR en GB Lo ResDocument2 pagesFlexkraft AIR en GB Lo ResDarpan chauhanPas encore d'évaluation
- SE250SM-Ce (1) - User ManualDocument10 pagesSE250SM-Ce (1) - User ManualJoão Francisco MontanhaniPas encore d'évaluation
- Hawker Battery Service ManualDocument59 pagesHawker Battery Service ManualBill Waters100% (1)
- UoN SyllabusDocument40 pagesUoN SyllabusSam AngPas encore d'évaluation
- Lavalier Microphones enDocument12 pagesLavalier Microphones enedvardferPas encore d'évaluation
- 2006 June Phy3 MsDocument13 pages2006 June Phy3 MsSharifahHafizahAl-jufPas encore d'évaluation
- BASIC Stamp Manual v2-0Document353 pagesBASIC Stamp Manual v2-0Rogers ArismendiPas encore d'évaluation
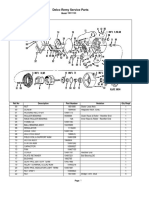
- Alternador Delco Remy 24 VCD 100 Amo.19011153Document2 pagesAlternador Delco Remy 24 VCD 100 Amo.19011153JoséLuisRodríguezSánchezPas encore d'évaluation
- TeB1 TEB2Document4 pagesTeB1 TEB2Luiz AlmeidaPas encore d'évaluation
- Below 60 II Sem-Converted-Compressed HBDocument6 pagesBelow 60 II Sem-Converted-Compressed HBLakshay GuptaPas encore d'évaluation
- JNM 2283Document14 pagesJNM 2283Radhay SpidyPas encore d'évaluation
- Power Metal Fixed Resistors: FeaturesDocument2 pagesPower Metal Fixed Resistors: FeaturesMiguel Angel Riveros GuzmanPas encore d'évaluation
- Service Manual Brother nx600Document214 pagesService Manual Brother nx600Diana DaschnerPas encore d'évaluation
- High Frequency Modeling of Transformer Using Black Box Frequency Response AnalysisDocument7 pagesHigh Frequency Modeling of Transformer Using Black Box Frequency Response AnalysisJosPas encore d'évaluation