Vous aimerez peut-être aussi
- Introducción A Señales Electrónicas Del MotorDocument12 pagesIntroducción A Señales Electrónicas Del MotorVANESAPas encore d'évaluation
- Informe Sensores 1Document13 pagesInforme Sensores 1nandofelixPas encore d'évaluation
- Sensores HyundaiDocument9 pagesSensores Hyundaialdo espinozaPas encore d'évaluation
- ECUDocument26 pagesECUAlvaro Poveda100% (1)
- Sensor MafDocument4 pagesSensor MafJesús VencedorPas encore d'évaluation
- Sensor Aps (Atp)Document14 pagesSensor Aps (Atp)Mudflap Calizaya100% (1)
- Probador de TAC PDFDocument19 pagesProbador de TAC PDFraulex2007Pas encore d'évaluation
- FORMATO N 04-Comprobacion Circuito Del Sensor THWDocument3 pagesFORMATO N 04-Comprobacion Circuito Del Sensor THWESGUAR INSTRUCTORESPas encore d'évaluation
- Codigos Obd1 ToyotaDocument2 pagesCodigos Obd1 ToyotaIker Manuel RamirezPas encore d'évaluation
- Instituto Tecnológico Superior Central Técnico Nombre: Curso: Fecha: Tema: Funcionamiento de La EcuDocument4 pagesInstituto Tecnológico Superior Central Técnico Nombre: Curso: Fecha: Tema: Funcionamiento de La EcuEsteban SevillaPas encore d'évaluation
- PINOUT Motor - CLIO-2004 1.4Document6 pagesPINOUT Motor - CLIO-2004 1.4Rodny DularwaPas encore d'évaluation
- Codigos Obd2 Diagnostico p0100 - p0199Document7 pagesCodigos Obd2 Diagnostico p0100 - p0199Daruin Andres Florez CardonaPas encore d'évaluation
- TRABAJO DE ClasesDocument2 pagesTRABAJO DE ClasesGustavo CallePas encore d'évaluation
- Curso de Reprogramacion de CentralitasDocument13 pagesCurso de Reprogramacion de CentralitasRomán Osvaldo Alemán GonzálezPas encore d'évaluation
- Curso Sistema Direccion Caracteristicas Arquitectura Historia Mecanismos TiposDocument28 pagesCurso Sistema Direccion Caracteristicas Arquitectura Historia Mecanismos TipospedroPas encore d'évaluation
- Test Ajuste de CombustibleDocument1 pageTest Ajuste de CombustibleJose G Mejia CPas encore d'évaluation
- Clase #07 CeprotecDocument8 pagesClase #07 CeprotecceledonioPas encore d'évaluation
- Banqueo ECU Toyota 4EDocument11 pagesBanqueo ECU Toyota 4ELuis TarquiPas encore d'évaluation
- Manual de Diagnostico de MotorDocument34 pagesManual de Diagnostico de MotorYdelkadiasmela DominguezmorelPas encore d'évaluation
- Acelerador ElectrónicoDocument12 pagesAcelerador ElectrónicoDo Lc50% (2)
- Ajustando El Tiempo de Encendido PDFDocument5 pagesAjustando El Tiempo de Encendido PDFErickReyesPas encore d'évaluation
- Guía de Práctica 1Document5 pagesGuía de Práctica 1Geovanny TandazoPas encore d'évaluation
- TOYOTADocument267 pagesTOYOTAAlexAnder CortezPas encore d'évaluation
- Sensor MAP - Inyección Electrónica.Document6 pagesSensor MAP - Inyección Electrónica.Héctor CangásPas encore d'évaluation
- Cómo Probar Una Bomba de CombustibleDocument13 pagesCómo Probar Una Bomba de CombustibleDeiby CeleminPas encore d'évaluation
- El Conector OBDII y Sus Protocolos de ComunicaciónDocument3 pagesEl Conector OBDII y Sus Protocolos de ComunicaciónGermàn Cancino EspinozaPas encore d'évaluation
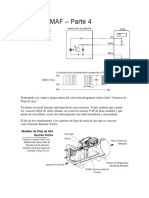
- S MAF: Ubicación: Se Encuentra Entre El Filtro o Purificador de Aire y La Mariposa de Aceleración Como Se Muestra en LaDocument10 pagesS MAF: Ubicación: Se Encuentra Entre El Filtro o Purificador de Aire y La Mariposa de Aceleración Como Se Muestra en LaFernando PortuguezPas encore d'évaluation
- Simulador TpsDocument4 pagesSimulador TpsRene CaMePas encore d'évaluation
- Modulo 1 Obd1 y ParcialesDocument230 pagesModulo 1 Obd1 y ParcialesgilbertoPas encore d'évaluation
- Manual Ews BMW PDFDocument8 pagesManual Ews BMW PDFOscar OsPas encore d'évaluation
- AutotronicaDocument25 pagesAutotronicaVictor Robles Romero100% (1)
- Comp Sist Control ElectronicoDocument38 pagesComp Sist Control ElectronicoRamiro ChambiPas encore d'évaluation
- Clase #05 CeprotecDocument8 pagesClase #05 Ceprotecceledonio100% (1)
- Comprobacion Funcional DTCDocument76 pagesComprobacion Funcional DTCChristiam OrtegaPas encore d'évaluation
- Sistema de ArranqueDocument47 pagesSistema de ArranquevladimirPas encore d'évaluation
- Manual Multipexado GMDocument37 pagesManual Multipexado GMAndrésMartínPas encore d'évaluation
- Cómo Probar El Módulo de EncendidoDocument12 pagesCómo Probar El Módulo de Encendidoroberto_barron_1750% (2)
- Sistema Inmovilizador EléctricoDocument22 pagesSistema Inmovilizador EléctricoDanilo CasallasPas encore d'évaluation
- Manual de Probador Universal PDFDocument7 pagesManual de Probador Universal PDFJesus Garcia100% (1)
- Sensor de Temperatura PDFDocument21 pagesSensor de Temperatura PDFDavid Esteban Leighton ColladoPas encore d'évaluation
- G Scan 2 - Año 2016 Ficha TécnicaDocument4 pagesG Scan 2 - Año 2016 Ficha Técnicavilma50% (2)
- Sistema de Red Can Automotriz PDFDocument4 pagesSistema de Red Can Automotriz PDFLIMBERTOLEDOPas encore d'évaluation
- Sensores MAFDocument4 pagesSensores MAFAlberto M FuentesPas encore d'évaluation
- Falla en El Sistema PATSDocument2 pagesFalla en El Sistema PATSgtranPas encore d'évaluation
- Manual - Scanner en EspañolDocument84 pagesManual - Scanner en EspañolOscar SotoPas encore d'évaluation
- Informe Computadoras AutomotricesDocument9 pagesInforme Computadoras AutomotricesEdwin NivicelaPas encore d'évaluation
- Air Bag SP PDFDocument23 pagesAir Bag SP PDFManuel Enrique Alarcon CastilloPas encore d'évaluation
- Siste de Alimen - ElectronicaDocument9 pagesSiste de Alimen - ElectronicaLuis ChangoluisaPas encore d'évaluation
- Material Esquema Sistema Control Motores Tccs Ordenador Toyota Proceso Diagrama Funcionamiento Ecu ComponentesDocument3 pagesMaterial Esquema Sistema Control Motores Tccs Ordenador Toyota Proceso Diagrama Funcionamiento Ecu ComponentesJavier Jimenez PerezPas encore d'évaluation
- Alfa Romeo 156 1.6 1998 - 01 Gestion Del MotorDocument3 pagesAlfa Romeo 156 1.6 1998 - 01 Gestion Del Motorfelipe cordovaPas encore d'évaluation
- Codigos DTCDocument3 pagesCodigos DTCJHON DAVID GARCIA QUIROGA100% (1)
- Informe Practica Banqueo Ecu AutotronicaDocument17 pagesInforme Practica Banqueo Ecu AutotronicaPaul Dutan100% (2)
- Transistores en Inyectores-Peak and HoldDocument4 pagesTransistores en Inyectores-Peak and HoldDiego Duran YanezPas encore d'évaluation
- Sistema de Inyección Electrónico - Gasolina Multipunto Siemens SIMK31Document2 pagesSistema de Inyección Electrónico - Gasolina Multipunto Siemens SIMK31juan100% (1)
- Informe ElectronicaDocument10 pagesInforme ElectronicaFrancisco Alcayaga100% (1)
- Manual Probador Universal 2Document18 pagesManual Probador Universal 2Heriberto Huanca AmaruPas encore d'évaluation
- Imprimir Sensores y ActuadoresDocument17 pagesImprimir Sensores y ActuadoresCardenas Infotep100% (1)
- Todo Sobre Los Principales Sensores Del Sistema OBDII y Sobre Sus Códigos DTC Genéricos Establecidos Por La SAEDocument6 pagesTodo Sobre Los Principales Sensores Del Sistema OBDII y Sobre Sus Códigos DTC Genéricos Establecidos Por La SAEzahirron100% (1)
- Sensores AutomotrizDocument115 pagesSensores AutomotrizPaul Ricardo FONSECA JIMENEZ100% (1)
- TRABAJO de Electricidad Jesús MDocument16 pagesTRABAJO de Electricidad Jesús Mjesus miranda barriosPas encore d'évaluation
- Tarea 1 Seminario Integracion Ecología Biodiversidad Nov.2021Document4 pagesTarea 1 Seminario Integracion Ecología Biodiversidad Nov.2021Luis CaizaPas encore d'évaluation
- Diseño y Gestion de ProyectosDocument6 pagesDiseño y Gestion de ProyectosLuis CaizaPas encore d'évaluation
- Implementar Una Microempresa Procesadora de Botones y Artesanías de Tagua en Santo DomingoDocument3 pagesImplementar Una Microempresa Procesadora de Botones y Artesanías de Tagua en Santo DomingoLuis CaizaPas encore d'évaluation
- Importancia de La Innovacion (Hinojoza)Document5 pagesImportancia de La Innovacion (Hinojoza)Luis CaizaPas encore d'évaluation
- Control de GasesDocument9 pagesControl de GasesLuis CaizaPas encore d'évaluation
- Restauracion de HabitadsDocument4 pagesRestauracion de HabitadsLuis CaizaPas encore d'évaluation
- AIREDocument5 pagesAIRELuis CaizaPas encore d'évaluation
- Revista Ute GonzalesDocument5 pagesRevista Ute GonzalesLuis CaizaPas encore d'évaluation
- Consulta Normas APADocument5 pagesConsulta Normas APALuis CaizaPas encore d'évaluation
- Revista Ute GonzalesDocument5 pagesRevista Ute GonzalesLuis CaizaPas encore d'évaluation
- UTE REVISTA Luis CaizaDocument4 pagesUTE REVISTA Luis CaizaLuis CaizaPas encore d'évaluation
- Ejercicios de NeumáticaDocument13 pagesEjercicios de NeumáticaPaul Lescano100% (1)
- Cuestionario de Interciclo Luis CaizaDocument3 pagesCuestionario de Interciclo Luis CaizaLuis CaizaPas encore d'évaluation
- Inen (SGC)Document5 pagesInen (SGC)Luis CaizaPas encore d'évaluation
- Power SplitDocument3 pagesPower SplitLuis CaizaPas encore d'évaluation
- Ley de Creación Del Servicio de Rentas InternasDocument11 pagesLey de Creación Del Servicio de Rentas InternasMak TsubatsaPas encore d'évaluation
- La Tierra Sin Humanos (Impacto Ambiental)Document4 pagesLa Tierra Sin Humanos (Impacto Ambiental)Luis CaizaPas encore d'évaluation
- Instituciones Iso 9000Document1 pageInstituciones Iso 9000Luis CaizaPas encore d'évaluation
- Glosario 5 NivelDocument3 pagesGlosario 5 NivelLuis CaizaPas encore d'évaluation
- Nuevas Teg. (Freno Regenerativo)Document2 pagesNuevas Teg. (Freno Regenerativo)Luis CaizaPas encore d'évaluation
- Riesgo de Estres Termico Por Alta TemperaturaDocument2 pagesRiesgo de Estres Termico Por Alta TemperaturaLuis CaizaPas encore d'évaluation
- Base EsrucuturadaDocument1 pageBase EsrucuturadaLuis CaizaPas encore d'évaluation
- Impacto (Grupo 2) TipologiaDocument6 pagesImpacto (Grupo 2) TipologiaLuis CaizaPas encore d'évaluation
- Instituciones Iso 9000Document1 pageInstituciones Iso 9000Luis CaizaPas encore d'évaluation
- Gestion de La Innovacion 3 y 4Document14 pagesGestion de La Innovacion 3 y 4Luis CaizaPas encore d'évaluation
- Articulo 1Document3 pagesArticulo 1Luis CaizaPas encore d'évaluation
- Glosario 5 NivelDocument3 pagesGlosario 5 NivelLuis CaizaPas encore d'évaluation
- Planificacion Covid 19Document3 pagesPlanificacion Covid 19Luis CaizaPas encore d'évaluation
- ToxicologiaDocument8 pagesToxicologiaLuis CaizaPas encore d'évaluation
- Articulo 2Document4 pagesArticulo 2Luis CaizaPas encore d'évaluation
- RODAMIENTOS cmp-1Document54 pagesRODAMIENTOS cmp-1Daniel ApontePas encore d'évaluation
- 2016 Chevrolet Captiva Sport (VIN L) ABSDocument4 pages2016 Chevrolet Captiva Sport (VIN L) ABSPANHA MENPas encore d'évaluation
- Captura Basica de CadenasDocument17 pagesCaptura Basica de CadenasEl Genio Amorsito FelizPas encore d'évaluation
- Lenovo Legion 7 16 6 Userguide EsDocument52 pagesLenovo Legion 7 16 6 Userguide Esricardo riosPas encore d'évaluation
- Inverter A WordDocument45 pagesInverter A WordAb CaamañoPas encore d'évaluation
- Check List Maquina TermofusionDocument2 pagesCheck List Maquina TermofusionJessik GomezPas encore d'évaluation
- Startco Productos GeneralDocument58 pagesStartco Productos GeneralHamilton GutierrezPas encore d'évaluation
- Silabo de Reparacion de Equipos de Computo 2018-IIDocument4 pagesSilabo de Reparacion de Equipos de Computo 2018-IIMiller CrespinPas encore d'évaluation
- 3 1 Serie FSDocument2 pages3 1 Serie FSHugo PeraltaPas encore d'évaluation
- 51 Manual de Servicio RS 200Document240 pages51 Manual de Servicio RS 200Frank David Duarte Salamanca100% (10)
- Maquinas Industriales PDFDocument32 pagesMaquinas Industriales PDFDALITZA CASTILLO BUITRAGO67% (3)
- Domotica Con PLCDocument5 pagesDomotica Con PLCEduardo AdasmePas encore d'évaluation
- 0126 MP-CL1 Leaflet v3-23-11 PDFDocument2 pages0126 MP-CL1 Leaflet v3-23-11 PDFOmar Beronio ZegarraPas encore d'évaluation
- PRESUPUESTO LICO-MIMG-015-2019 Rev. 2 (002) ........Document48 pagesPRESUPUESTO LICO-MIMG-015-2019 Rev. 2 (002) ........Santiago Velez ManriquePas encore d'évaluation
- Practica 2 Control de Servomotores en Arduino Orlando SuarezDocument5 pagesPractica 2 Control de Servomotores en Arduino Orlando SuarezNathalia Rodriguez Acevedo100% (1)
- Solicitud de Cotizacion 16-12Document2 pagesSolicitud de Cotizacion 16-12Jose David HPas encore d'évaluation
- SQ11 Mini DV Manual de InstruccionesDocument3 pagesSQ11 Mini DV Manual de InstruccionesCapirabasPas encore d'évaluation
- Ficha Tecnica TE354 III GENDocument2 pagesFicha Tecnica TE354 III GENCesar MarkPas encore d'évaluation
- Aplicaciones de GeneradoresDocument1 pageAplicaciones de GeneradoresXoo UrzuaPas encore d'évaluation
- Catalogo Yamaha FZN150D BE41 - 2016Document63 pagesCatalogo Yamaha FZN150D BE41 - 2016DuckTronix100% (6)
- Pract 4Document13 pagesPract 4Isaac OrtegaPas encore d'évaluation
- Tipos de TornoDocument10 pagesTipos de TornoElizabeth FernandoPas encore d'évaluation
- Amplificador de 30 WattDocument5 pagesAmplificador de 30 WattPirry Brs PerdomoPas encore d'évaluation
- 20 347 LC PTC J2S2 220KV 002Document109 pages20 347 LC PTC J2S2 220KV 002alex silvaPas encore d'évaluation
- Manual Xiaomi 20000 Mah 18W Fast Charge Power BankDocument3 pagesManual Xiaomi 20000 Mah 18W Fast Charge Power Banktallerfoto2013Pas encore d'évaluation
- AIREDocument3 pagesAIRERoberth cueva mendozaPas encore d'évaluation
- Practica5 PDFDocument5 pagesPractica5 PDFJUAN CARLOSPas encore d'évaluation
- CEA Exp11Document6 pagesCEA Exp11tony pinkPas encore d'évaluation
- Vapor Iza DoraDocument4 pagesVapor Iza DoraChristian Saúl VillalvaPas encore d'évaluation
- LCE-SSOMA-F-38 Check List-TaladroDocument1 pageLCE-SSOMA-F-38 Check List-TaladroMolly HCPas encore d'évaluation