
Vous aimerez peut-être aussi
- CompetenciasDocument41 pagesCompetenciascecati292014Pas encore d'évaluation
- Tratamiento de Tierra-Fuller PDFDocument16 pagesTratamiento de Tierra-Fuller PDFYuri OmontePas encore d'évaluation
- Metodología para La Regeneración de Aceites DieléctricosDocument23 pagesMetodología para La Regeneración de Aceites DieléctricosCarmen Siccha Lazaro100% (1)
- Estructura Del Reporte BUAPDocument9 pagesEstructura Del Reporte BUAPJosé HernándezPas encore d'évaluation
- Produccion y Distribucion de Potencia HidraulicaDocument6 pagesProduccion y Distribucion de Potencia HidraulicaAlejandro Romero100% (1)
- 20 - Metodo de Volumenes FinitosDocument10 pages20 - Metodo de Volumenes FinitosDizay CMesccoPas encore d'évaluation
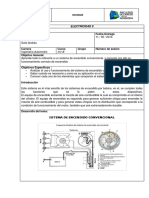
- Sistema EncendidoDocument10 pagesSistema EncendidomarxeduPas encore d'évaluation
- Mantenimiento Al TransformadorDocument6 pagesMantenimiento Al TransformadorIti PazosPas encore d'évaluation
- Tratamiento Del AceiteDocument11 pagesTratamiento Del AceiteJoel Caleb Huacasi PumaPas encore d'évaluation
- ACEITES H1 YoleimaDocument50 pagesACEITES H1 YoleimasjeniferqPas encore d'évaluation
- Tesis Subestaciones ElectricasDocument68 pagesTesis Subestaciones ElectricasXchelyairs HernandezPas encore d'évaluation
- Ciclo de Hirn Con RoceDocument2 pagesCiclo de Hirn Con RocejorgePas encore d'évaluation
- Bus de PotenciaDocument9 pagesBus de PotenciaIván DominguezPas encore d'évaluation
- Unidad VI Administracion de ProyectosDocument20 pagesUnidad VI Administracion de ProyectosIveida Lucero VazquezPas encore d'évaluation
- Sistema de Encendido ConvencionalDocument11 pagesSistema de Encendido ConvencionalKevinPas encore d'évaluation
- Mantenimiento Mayores A TransformadoresDocument17 pagesMantenimiento Mayores A Transformadoresviper royalPas encore d'évaluation
- Importancia de La Pruebas en TransformadoresDocument1 pageImportancia de La Pruebas en Transformadorespjgg26Pas encore d'évaluation
- Aspectos Fundamentales de La LegislaciónDocument25 pagesAspectos Fundamentales de La LegislaciónEduardo FabianPas encore d'évaluation
- Portafolio de Evidencias Humberto Gracia NevarezDocument27 pagesPortafolio de Evidencias Humberto Gracia NevarezHumberto Gracia NevarezPas encore d'évaluation
- Unidad 1 Normas y Especificaciones PDFDocument59 pagesUnidad 1 Normas y Especificaciones PDFHéctor García MelchorPas encore d'évaluation
- Trabajo Unidad 4Document39 pagesTrabajo Unidad 4marcelo ituriel gaona garciaPas encore d'évaluation
- Lineamientos Ifrp TesjiDocument16 pagesLineamientos Ifrp TesjiErikaPas encore d'évaluation
- Unidad 5Document13 pagesUnidad 5Miguel Ángel Rodriguez Gutiérrez100% (1)
- Acciones Basicas de ControlDocument19 pagesAcciones Basicas de ControlAnival Toribio Ortiz GonzalezPas encore d'évaluation
- Pruebas A TransformadoresDocument7 pagesPruebas A Transformadorespablo ariel santiagoPas encore d'évaluation
- Refrigeración y Selección de TransformadoresDocument30 pagesRefrigeración y Selección de TransformadoresHeber GarciaPas encore d'évaluation
- Motor Generador de Polos Regrabables PDFDocument25 pagesMotor Generador de Polos Regrabables PDFEdwin Camilo Delgado Martinez100% (1)
- Tesis Teresa Yadira Frías Martínez SolarDocument67 pagesTesis Teresa Yadira Frías Martínez Solarrigoberto alvaPas encore d'évaluation
- Diseño de Inventario de Materiales y Equipos para EmpresasDocument69 pagesDiseño de Inventario de Materiales y Equipos para Empresasmanuel cPas encore d'évaluation
- Instituto Tecnologico de TlalnepantlaDocument26 pagesInstituto Tecnologico de TlalnepantlaJorge Eslava RamosPas encore d'évaluation
- Conexiones EspecialesDocument12 pagesConexiones EspecialesalejandroPas encore d'évaluation
- Niveles de Proteccion de RedDocument8 pagesNiveles de Proteccion de Redwalexx04Pas encore d'évaluation
- Recomendaciones Generales Mto Planta ElectricaDocument3 pagesRecomendaciones Generales Mto Planta ElectricaJuan Diego Bahamon100% (1)
- Ciclos CombinadosDocument14 pagesCiclos CombinadosLeo CaceresPas encore d'évaluation
- Investigación de Tipos de BotonesDocument6 pagesInvestigación de Tipos de BotonesJoseCarlosZamoraPas encore d'évaluation
- Reporte PLC's PDFDocument7 pagesReporte PLC's PDFLuis RosborjPas encore d'évaluation
- Programa de LubricacionDocument15 pagesPrograma de LubricacionZeik Ivan100% (1)
- Ciclos CombinadosDocument46 pagesCiclos CombinadosXavier RamirezPas encore d'évaluation
- Ruido Eléctrico y TransitoriosDocument3 pagesRuido Eléctrico y TransitoriosAntonio TavaraPas encore d'évaluation
- Clasificación y Selección de Interruptores de PotenciaDocument12 pagesClasificación y Selección de Interruptores de PotenciaJulio Cesar VazquezPas encore d'évaluation
- Normas Oficiales MexicanasDocument20 pagesNormas Oficiales MexicanasJose RuizPas encore d'évaluation
- Portafolio de Evidencias (Mantenimoento A Equipos Inustriales)Document19 pagesPortafolio de Evidencias (Mantenimoento A Equipos Inustriales)Jorge LuisPas encore d'évaluation
- Envases Flexibles Iforme Final.Document26 pagesEnvases Flexibles Iforme Final.Ivan Andres Barrera MarmolejoPas encore d'évaluation
- Cómo Tramitar La Instalación de Un Sistema Solar Interconectado A CfeDocument3 pagesCómo Tramitar La Instalación de Un Sistema Solar Interconectado A Cfealberto cortes ordazPas encore d'évaluation
- Equipos Secundarios y de ProteccionDocument29 pagesEquipos Secundarios y de ProteccionCYNTHIA GUADALUPE MONTES DE OCA SÁNCHEZPas encore d'évaluation
- Informe TecnicoDocument12 pagesInforme TecnicoEduardo Ocampo OchoaPas encore d'évaluation
- Mant U2Document27 pagesMant U2Luis TapiaPas encore d'évaluation
- Generadores de VaporDocument67 pagesGeneradores de VaporLuiXs GR100% (1)
- Automotriz-08 Frenos PDFDocument178 pagesAutomotriz-08 Frenos PDFJose Ignacio Sanchez ArenasPas encore d'évaluation
- Sistema de Control de VelocidadDocument22 pagesSistema de Control de VelocidadRoberto Márquez ZamoraPas encore d'évaluation
- Anexo 01 Herrajes Electricos - Preguntas-FusionadoDocument10 pagesAnexo 01 Herrajes Electricos - Preguntas-FusionadoCarlos SanchezPas encore d'évaluation
- Lazo Abierto y Lazo CerradoDocument3 pagesLazo Abierto y Lazo Cerradojoe100% (1)
- Arranque A TensiónDocument12 pagesArranque A TensiónLuis Felix 100% (1)
- Conceptos Generales de Una Subestación Encapsulada en Gas Hexafluoruro de Azufre SF6Document22 pagesConceptos Generales de Una Subestación Encapsulada en Gas Hexafluoruro de Azufre SF6Elvin García MoratoPas encore d'évaluation
- Funcionamiento de Una Celda SolarDocument4 pagesFuncionamiento de Una Celda SolarJesus Antonio Mora PlacenciaPas encore d'évaluation
- Encendido ConvencionalDocument24 pagesEncendido ConvencionalDAVID SILVAPas encore d'évaluation
- Sistemas de Protecciones Electricas Unidad 1Document20 pagesSistemas de Protecciones Electricas Unidad 1Josmar JimenezPas encore d'évaluation
- Muñoz GJADocument203 pagesMuñoz GJADavid HeraldoPas encore d'évaluation
- Calculo IIDocument191 pagesCalculo IIAldo Aldorey100% (3)
- Resumen Del LibroDocument8 pagesResumen Del Libroluis perezPas encore d'évaluation
- Capa Limite en Barcos A VelaDocument2 pagesCapa Limite en Barcos A Velaluis perezPas encore d'évaluation
- Pasteleria BasicaDocument15 pagesPasteleria Basicaluis perez100% (1)
- Universidad Nacional Del CallaoDocument30 pagesUniversidad Nacional Del Callaoluis perezPas encore d'évaluation
- 11-Fibra HuacayaDocument29 pages11-Fibra HuacayaKathia Cordova PachecoPas encore d'évaluation
- FonocardiogramaDocument8 pagesFonocardiogramaMoises Tapia BaezPas encore d'évaluation
- Escala de Iconicidad Decreciente de Abraham MolesDocument1 pageEscala de Iconicidad Decreciente de Abraham MolesValeria RuizPas encore d'évaluation
- Informe de Fisica 2Document7 pagesInforme de Fisica 2Elvis ArizacaPas encore d'évaluation
- Construccion de Plantas para Peces HYA 2 (Reparado)Document91 pagesConstruccion de Plantas para Peces HYA 2 (Reparado)Javier Enrique Diaz ChacinPas encore d'évaluation
- Funciones Invertibles y Su Gráfica. Relación Entre Composición de Funciones y Funciones InvertiblesDocument9 pagesFunciones Invertibles y Su Gráfica. Relación Entre Composición de Funciones y Funciones Invertiblesjuan sebastian sanchezPas encore d'évaluation
- Jaime Jesus Cid FalcetoDocument339 pagesJaime Jesus Cid FalcetoDiana L. QuintanaPas encore d'évaluation
- @@@-Quimica-1-Bachillerato-Simon-Plan Anual PDFDocument25 pages@@@-Quimica-1-Bachillerato-Simon-Plan Anual PDFrami pinanPas encore d'évaluation
- Presas 2018Document88 pagesPresas 2018DaymerRousselHuaytaHuaman100% (2)
- 8Document8 pages8Eduardo Salcedo FloresPas encore d'évaluation
- Informe de Verificación Inicial Casa HabitaciónDocument25 pagesInforme de Verificación Inicial Casa HabitaciónCristian GomezPas encore d'évaluation
- S17.s1 Material 2-Solucionario de La PC 3 de TermodinamicaDocument5 pagesS17.s1 Material 2-Solucionario de La PC 3 de TermodinamicaJoaquin Gago ChavezPas encore d'évaluation
- CV ExampleDocument4 pagesCV ExampleJorge Luis Ortiz CcamaPas encore d'évaluation
- Amplificador Estéreo de 250 Watts Complementario PDFDocument6 pagesAmplificador Estéreo de 250 Watts Complementario PDFJose Alfredo GutierrezPas encore d'évaluation
- Curso Basico RosacruzDocument13 pagesCurso Basico RosacruzRegina Levy67% (3)
- Nom 020 STPS 2002Document22 pagesNom 020 STPS 2002Alfredo RamirezPas encore d'évaluation
- Espacios VectorialesDocument15 pagesEspacios Vectorialesvictor manuel vergara duartePas encore d'évaluation
- Propiedades Químicas y Su VariaciónDocument4 pagesPropiedades Químicas y Su VariaciónNora MatherPas encore d'évaluation
- Modelado y Simulacion - Tarea 1Document6 pagesModelado y Simulacion - Tarea 1Elias PolancoPas encore d'évaluation
- Manual Polarr Dggei930 Jan 04 Spanish VersionDocument46 pagesManual Polarr Dggei930 Jan 04 Spanish Versiongusfaj100% (1)
- GW-Formato PPT - Gino Calderon Rev EDocument38 pagesGW-Formato PPT - Gino Calderon Rev Eomar cPas encore d'évaluation
- Perdida de Circulacion de FluidosDocument33 pagesPerdida de Circulacion de FluidosJamie Cortez100% (4)
- Tubería Forzada InformeDocument66 pagesTubería Forzada InformeJosé Steve Palomino RodríguezPas encore d'évaluation
- Formato WPSDocument1 pageFormato WPSGustavo RolongPas encore d'évaluation
- Filarmónica de BerlínDocument13 pagesFilarmónica de BerlínJonathan Dueñas SánchezPas encore d'évaluation
- Informe de Sifon FinalDocument18 pagesInforme de Sifon Finalnataly_12_95Pas encore d'évaluation
- Trazo de Carretera - InformeDocument9 pagesTrazo de Carretera - InformeJhonatan Cabanillas Luna100% (2)
- Origenes de La Ingenieria ModernaDocument4 pagesOrigenes de La Ingenieria ModernaMiguel MontillaPas encore d'évaluation
- Procedimiento Qu - 005 para La Calibración de Equipos para Cromatografía de GasesDocument48 pagesProcedimiento Qu - 005 para La Calibración de Equipos para Cromatografía de Gasesandresplata100% (1)
- Guía práctica para la refracción ocularD'EverandGuía práctica para la refracción ocularÉvaluation : 5 sur 5 étoiles5/5 (2)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleD'EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleÉvaluation : 5 sur 5 étoiles5/5 (3)
- La teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaD'EverandLa teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaÉvaluation : 4 sur 5 étoiles4/5 (32)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalD'EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalÉvaluation : 5 sur 5 étoiles5/5 (3)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiD'EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiÉvaluation : 3.5 sur 5 étoiles3.5/5 (5)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaD'EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaÉvaluation : 5 sur 5 étoiles5/5 (5)
- Armónicas en Sistemas Eléctricos IndustrialesD'EverandArmónicas en Sistemas Eléctricos IndustrialesÉvaluation : 4.5 sur 5 étoiles4.5/5 (12)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraD'EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraÉvaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Sanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadD'EverandSanación por Cristales - La guía definitiva para principiantes: Descubre el poder de los cristales curativos, piedras y minerales para la salud y la felicidadÉvaluation : 4.5 sur 5 étoiles4.5/5 (14)
- Fundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosD'EverandFundamentos de mecánica de fluidos.: Con ejercicios parcialmente resueltosPas encore d'évaluation
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasD'EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasÉvaluation : 5 sur 5 étoiles5/5 (4)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosD'EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosÉvaluation : 5 sur 5 étoiles5/5 (1)
- Modelamiento y simulación de sistemas con Simulink: Aplicaciones en ingeniería estructuralD'EverandModelamiento y simulación de sistemas con Simulink: Aplicaciones en ingeniería estructuralÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- Proyectos de instalaciones eléctrica de baja tensiónD'EverandProyectos de instalaciones eléctrica de baja tensiónÉvaluation : 5 sur 5 étoiles5/5 (1)
- La física cuántica: Todo sobre la teoría capaz de explicar por qué los gatos pueden estar vivos y muertos a la vezD'EverandLa física cuántica: Todo sobre la teoría capaz de explicar por qué los gatos pueden estar vivos y muertos a la vezÉvaluation : 4 sur 5 étoiles4/5 (4)











































































































![Diseño de Experimentos [Métodos y Aplicaciones]](https://imgv2-2-f.scribdassets.com/img/word_document/436271314/149x198/596c96deb2/1654336147?v=1)











