Vous aimerez peut-être aussi
- Stability Improvement of An ATV by Modifying Suspension ParametersDocument5 pagesStability Improvement of An ATV by Modifying Suspension ParametersAndhdPas encore d'évaluation
- Irjet V4i10240 PDFDocument7 pagesIrjet V4i10240 PDFSai Krishna SKPas encore d'évaluation
- SUSPENSION DEPARTMENT Ex FileDocument13 pagesSUSPENSION DEPARTMENT Ex FileJagraj SinghPas encore d'évaluation
- Eh1100 3Document7 pagesEh1100 3Alfonso BerRamPas encore d'évaluation
- Suspension ReportDocument5 pagesSuspension Reportadithiyan saravananPas encore d'évaluation
- Dump Truck: Nominal Payload With Standard Equipment: Maximum GMW: EngineDocument7 pagesDump Truck: Nominal Payload With Standard Equipment: Maximum GMW: Engineamir sadighiPas encore d'évaluation
- Double Wishbone SuspensionDocument2 pagesDouble Wishbone SuspensionAkash MahajanPas encore d'évaluation
- Irjet V7i51227Document7 pagesIrjet V7i51227Ashbin BIJUPas encore d'évaluation
- Suspension: DescriptionDocument23 pagesSuspension: Descriptionсергей королевPas encore d'évaluation
- Comparitive StudyDocument4 pagesComparitive StudySivadanusPas encore d'évaluation
- Irjet V5i6554 PDFDocument3 pagesIrjet V5i6554 PDFAloaa AlaaPas encore d'évaluation
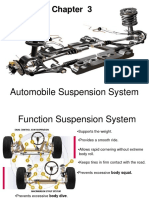
- Automobile Suspension Detailed Analysis PDFDocument19 pagesAutomobile Suspension Detailed Analysis PDFalpPas encore d'évaluation
- Multilink Suspension System: Marcelo Enriquez Velasquez VEMEC TEAMDocument4 pagesMultilink Suspension System: Marcelo Enriquez Velasquez VEMEC TEAMMARCELO ALBERTO ENRIQUEZ VELASQUEZPas encore d'évaluation
- 1 Final Technical Report Mini BajaDocument14 pages1 Final Technical Report Mini BajaLucasPas encore d'évaluation
- Ball JointDocument5 pagesBall JointFranciscus Xaverius Bayu SetiawanPas encore d'évaluation
- Design, Analysis and Fabrication of A Suspension System For An All Terrain VehicleDocument14 pagesDesign, Analysis and Fabrication of A Suspension System For An All Terrain VehicleJuicYm mPas encore d'évaluation
- All Wheel Steering SystemDocument4 pagesAll Wheel Steering SystemMiftahul Faruq Ibnul FatoniPas encore d'évaluation
- 3 Wheel Electric Forklift Trucks: B13R / 15R / 16R-5 (24V Rear Wheel Drive)Document6 pages3 Wheel Electric Forklift Trucks: B13R / 15R / 16R-5 (24V Rear Wheel Drive)YakupovmmPas encore d'évaluation
- حل اسيمنت Suspension عبد التوابDocument8 pagesحل اسيمنت Suspension عبد التوابnwg6ssdm8rPas encore d'évaluation
- Automobile Suspension System: by Kharde R.B. S.E. Mechanical, Div: ADocument33 pagesAutomobile Suspension System: by Kharde R.B. S.E. Mechanical, Div: AKharde RushikeshPas encore d'évaluation
- Suspension SystemDocument24 pagesSuspension SystemkentPas encore d'évaluation
- Baja Suspension ReportDocument3 pagesBaja Suspension ReportheroPas encore d'évaluation
- Car Suspension SystemDocument9 pagesCar Suspension SystemEMMANUEL BIRUNGIPas encore d'évaluation
- Design of Walking Beam Pendle Axle Suspension System: K. Arunachalam, P. Mannar JawaharDocument4 pagesDesign of Walking Beam Pendle Axle Suspension System: K. Arunachalam, P. Mannar JawaharHugo RodriguezPas encore d'évaluation
- Analysis For Suspension Hardpoint of Formula SAE Car Based On Correlation TheoryDocument6 pagesAnalysis For Suspension Hardpoint of Formula SAE Car Based On Correlation TheoryAJHAY BABU J KPas encore d'évaluation
- Suspension SystemDocument10 pagesSuspension SystemMécanique et Diagnostic automobilePas encore d'évaluation
- Ijmet 08 08 019Document8 pagesIjmet 08 08 019achumilemlata48Pas encore d'évaluation
- Senior Project ReportDocument6 pagesSenior Project ReportRoss Bunnell100% (1)
- Wheel Loader Specifications: Service Weight 13.7 T - 14,5 T Engine Output 130 KW Loading Buckets 2.3 - 6.0 MDocument10 pagesWheel Loader Specifications: Service Weight 13.7 T - 14,5 T Engine Output 130 KW Loading Buckets 2.3 - 6.0 MIbrahim AwadPas encore d'évaluation
- Technical Proposal PresentationDocument6 pagesTechnical Proposal PresentationAkash PatilPas encore d'évaluation
- 17me655 Module 3.1Document23 pages17me655 Module 3.1VinayakPas encore d'évaluation
- Legacy V Design Report: Varun Talathi, Ajinkya Belsare, Aditya Chivate, Abhilash ChopadeDocument8 pagesLegacy V Design Report: Varun Talathi, Ajinkya Belsare, Aditya Chivate, Abhilash ChopadeJuicYm mPas encore d'évaluation
- A Comparative Study of The SuspensionDocument7 pagesA Comparative Study of The SuspensionSivadanusPas encore d'évaluation
- Double Wishbone SuspensionDocument5 pagesDouble Wishbone SuspensionalexmarieiPas encore d'évaluation
- Lva1 App6892Document9 pagesLva1 App6892ssaassaasssPas encore d'évaluation
- Technical Specification:-: MODEL:-ML200Document7 pagesTechnical Specification:-: MODEL:-ML200sumit ghosalPas encore d'évaluation
- ZF Steering Columns - ZF LenksystemeDocument2 pagesZF Steering Columns - ZF LenksystemewurtukukPas encore d'évaluation
- Indian Institute of Technology PatnaDocument14 pagesIndian Institute of Technology PatnaAnkit SahPas encore d'évaluation
- Spring and Shock AbsorberDocument16 pagesSpring and Shock AbsorberAzim AzlanPas encore d'évaluation
- Suspension SystemsDocument118 pagesSuspension SystemsEZHILARASAN R100% (1)
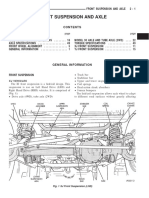
- Jeep Cherokee Sport 97 XJ Suspensão DianteiraDocument50 pagesJeep Cherokee Sport 97 XJ Suspensão DianteiraFrancisco KappsPas encore d'évaluation
- Special Feature of Mini Lift: Technical SpecificationDocument8 pagesSpecial Feature of Mini Lift: Technical Specificationsumit ghosalPas encore d'évaluation
- Wheel Loader 9020 - Full (2012)Document12 pagesWheel Loader 9020 - Full (2012)Plr. Baswapur100% (1)
- Experiments in Improving Tractor Operator Ride by Means of A Cab SuspensionDocument16 pagesExperiments in Improving Tractor Operator Ride by Means of A Cab SuspensionSergey ZlenkoPas encore d'évaluation
- Chapter 19 (Heavy Duty Truck Axle) PDFDocument29 pagesChapter 19 (Heavy Duty Truck Axle) PDFZIBA KHADIBIPas encore d'évaluation
- Design UprightDocument5 pagesDesign UprightJohn HopkinsPas encore d'évaluation
- Automobile Front Suspension: Prsented byDocument21 pagesAutomobile Front Suspension: Prsented byPiyush PareekPas encore d'évaluation
- Suspension SystemDocument36 pagesSuspension SystemRahul VermaPas encore d'évaluation
- Independent Front Suspension SystemDocument6 pagesIndependent Front Suspension SystemChetan SomashekarPas encore d'évaluation
- SELECTION AND MODIFICATION OF INDEPENDENT SUSPENSION MECHANISM FOR A TERRAIN VEHICLE WITH FOUR WHEELS DRIVE Ijariie1405 1 Volume 1 15 Page 61 66Document6 pagesSELECTION AND MODIFICATION OF INDEPENDENT SUSPENSION MECHANISM FOR A TERRAIN VEHICLE WITH FOUR WHEELS DRIVE Ijariie1405 1 Volume 1 15 Page 61 66Sami Onur VuralPas encore d'évaluation
- Suspension SonDocument61 pagesSuspension SonNecmi AtiPas encore d'évaluation
- Modal and Stress Analysis of Lower Wishbone Arm Along With TopologyDocument7 pagesModal and Stress Analysis of Lower Wishbone Arm Along With TopologyInternational Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Suspension SystemsDocument35 pagesSuspension SystemsMErdemDemirPas encore d'évaluation
- Unit-Iv Steering SystemDocument20 pagesUnit-Iv Steering SystemMark MubiruPas encore d'évaluation
- Car SuspensionDocument14 pagesCar SuspensionIbrahim HasanPas encore d'évaluation
- Manuali Officina Yj/Xj 1993Document48 pagesManuali Officina Yj/Xj 1993stormchidPas encore d'évaluation
- Notes Unit 4 AEN 22656 AY 2023-24Document18 pagesNotes Unit 4 AEN 22656 AY 2023-24yashwaghmare674Pas encore d'évaluation
- SUMSEM2022-23 MEE3006 ETH VL2022230700301 2023-06-12 Reference-Material-IDocument58 pagesSUMSEM2022-23 MEE3006 ETH VL2022230700301 2023-06-12 Reference-Material-ISiddhant TemgharePas encore d'évaluation
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsD'EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsPas encore d'évaluation
- CBC Heo (Wheel Loader) NC IIDocument58 pagesCBC Heo (Wheel Loader) NC IIJohn JamesPas encore d'évaluation
- Yale Revision WorksheetDocument3 pagesYale Revision WorksheetYASHI AGRAWALPas encore d'évaluation
- XII CS Material Chap7 2012 13Document21 pagesXII CS Material Chap7 2012 13Ashis PradhanPas encore d'évaluation
- Lacey Robertson Resume 3-6-20Document1 pageLacey Robertson Resume 3-6-20api-410771996Pas encore d'évaluation
- The Linguistic Colonialism of EnglishDocument4 pagesThe Linguistic Colonialism of EnglishAdriana MirandaPas encore d'évaluation
- Contemporary Strategic ManagementDocument2 pagesContemporary Strategic ManagementZee Dee100% (1)
- Job Satisfaction VariableDocument2 pagesJob Satisfaction VariableAnagha Pawar - 34Pas encore d'évaluation
- Worst of Autocall Certificate With Memory EffectDocument1 pageWorst of Autocall Certificate With Memory Effectapi-25889552Pas encore d'évaluation
- Federalist Papers 10 51 ExcerptsDocument2 pagesFederalist Papers 10 51 Excerptsapi-292351355Pas encore d'évaluation
- PETAL Sentence StartersDocument1 pagePETAL Sentence StartersSnip x Hunt manPas encore d'évaluation
- Smartfind E5 g5 User ManualDocument49 pagesSmartfind E5 g5 User ManualdrewlioPas encore d'évaluation
- 2500 Valve BrochureDocument12 pages2500 Valve BrochureJurie_sk3608Pas encore d'évaluation
- Galgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesDocument2 pagesGalgotias University Uttar Pradesh School of Computing Science & Engineering B.Tech. (CSE) 2018-19 Semester Wise Breakup of CoursesRohit Singh BhatiPas encore d'évaluation
- UNIT 5-8 PrintingDocument17 pagesUNIT 5-8 PrintingNOODPas encore d'évaluation
- Volvo BL 71 ManualDocument280 pagesVolvo BL 71 ManualAlberto G.D.100% (2)
- Iguard® LM SeriesDocument82 pagesIguard® LM SeriesImran ShahidPas encore d'évaluation
- Reference Paper Literature ReviewDocument5 pagesReference Paper Literature ReviewAani RashPas encore d'évaluation
- Chapter 5 Constructing An Agile Implementation PlanDocument4 pagesChapter 5 Constructing An Agile Implementation PlanAHMADPas encore d'évaluation
- Day6 7Document11 pagesDay6 7Abu Al-FarouqPas encore d'évaluation
- СV Nestor RodriguezDocument28 pagesСV Nestor RodriguezKate BrownPas encore d'évaluation
- Sale Counter List JuneDocument9 pagesSale Counter List Junep6a4nduPas encore d'évaluation
- Central University of Karnataka: Entrance Examinations Results 2016Document4 pagesCentral University of Karnataka: Entrance Examinations Results 2016Saurabh ShubhamPas encore d'évaluation
- MFE Module 1 .Document15 pagesMFE Module 1 .Adarsh KPas encore d'évaluation
- Pathophysiology of Myocardial Infarction and Acute Management StrategiesDocument11 pagesPathophysiology of Myocardial Infarction and Acute Management StrategiesnwabukingzPas encore d'évaluation
- Mueller Hinton Agar (M-H Agar) : CompositionDocument2 pagesMueller Hinton Agar (M-H Agar) : CompositionRizkaaulyaaPas encore d'évaluation
- 3D Printing & Embedded ElectronicsDocument7 pages3D Printing & Embedded ElectronicsSantiago PatitucciPas encore d'évaluation
- Enlightened ExperimentationDocument8 pagesEnlightened ExperimentationRaeed HassanPas encore d'évaluation
- 25 Middlegame Concepts Every Chess Player Must KnowDocument2 pages25 Middlegame Concepts Every Chess Player Must KnowKasparicoPas encore d'évaluation
- Data MiningDocument28 pagesData MiningGURUPADA PATIPas encore d'évaluation