Vous aimerez peut-être aussi
- Planeacion de La Semana DiagnosticaDocument5 pagesPlaneacion de La Semana DiagnosticaItzell TorresPas encore d'évaluation
- Estandarización de Procesos Como Herramienta de Gestión en La Industria AvícolaDocument8 pagesEstandarización de Procesos Como Herramienta de Gestión en La Industria AvícolaHermenegildo Taboada HermesPas encore d'évaluation
- Ficha Tecnica TronzadoraDocument2 pagesFicha Tecnica TronzadoraHéctor Campos75% (4)
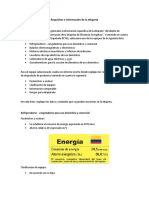
- Requisitos e Información de La Etiqueta Informe Actividad 2Document5 pagesRequisitos e Información de La Etiqueta Informe Actividad 2jorge100% (2)
- Requisitos e Información de La Etiqueta Informe Actividad 2Document5 pagesRequisitos e Información de La Etiqueta Informe Actividad 2jorge100% (2)
- Proteccion Contra Contactos IndirectosDocument42 pagesProteccion Contra Contactos IndirectosJose Espinoza Quispe100% (1)
- Protocolos de Comunicaciones IndustrialesDocument9 pagesProtocolos de Comunicaciones IndustrialesErick Fernando RivasPas encore d'évaluation
- Controlador Logico ProgramableDocument55 pagesControlador Logico ProgramableAle Key100% (1)
- Tema 8.3 Control de Cambiadores de CalorDocument26 pagesTema 8.3 Control de Cambiadores de Calorearcem9264100% (1)
- PowerFlex 755 HiHP - Alarma 10130, 10131 y 10132Document1 pagePowerFlex 755 HiHP - Alarma 10130, 10131 y 10132Veronica HansonPas encore d'évaluation
- Guía 01Document10 pagesGuía 01Diego MontesPas encore d'évaluation
- Kaq 1ro Basico 20Document4 pagesKaq 1ro Basico 20Marleny Boj100% (1)
- El Experimento FiladelfiaDocument11 pagesEl Experimento FiladelfiaJorge Ivan Velazquez VicentePas encore d'évaluation
- Informe IntegradorDocument27 pagesInforme IntegradorCecilia María YurquinaPas encore d'évaluation
- Grupo 4 Trasmisor 8732e PDFDocument38 pagesGrupo 4 Trasmisor 8732e PDFAlex AguirrePas encore d'évaluation
- ScadaDocument18 pagesScadaguaxo salvajePas encore d'évaluation
- DcsDocument7 pagesDcsIgnacio Antonio Arevalo Budaleo100% (1)
- Pets-Inc-45 Procedimiento Uso Del Densimetro NuclearDocument9 pagesPets-Inc-45 Procedimiento Uso Del Densimetro NuclearMavila Rojas SilvaPas encore d'évaluation
- Demanda de TenenciaDocument4 pagesDemanda de TenenciaWalter ChumpitazPas encore d'évaluation
- Clase 1 InstrumentacionDocument35 pagesClase 1 InstrumentacionMARS BELL DANCEPas encore d'évaluation
- Comunicación OPCDocument16 pagesComunicación OPCChristian Supe100% (1)
- Control Lógico Programable ProyectoDocument24 pagesControl Lógico Programable ProyectorosaliaPas encore d'évaluation
- Maquinas Electricas UmbDocument24 pagesMaquinas Electricas UmbStephy A. DíazPas encore d'évaluation
- Tarea 2. Toma de Medición de Variables Según El Procedimiento de La Técnica de Análisis de Causa RaízDocument11 pagesTarea 2. Toma de Medición de Variables Según El Procedimiento de La Técnica de Análisis de Causa RaízFelipe RestrepoPas encore d'évaluation
- Actividad Semana 2 PLC 1Document6 pagesActividad Semana 2 PLC 1jorge dazaPas encore d'évaluation
- Manual de Instalacion y Uso de Kit FUNDAMENTOS DE TRANSDUCTORES LAB-VOLTDocument7 pagesManual de Instalacion y Uso de Kit FUNDAMENTOS DE TRANSDUCTORES LAB-VOLTDaniel Rocha UgaldePas encore d'évaluation
- 5 3 Guia 671878Document11 pages5 3 Guia 671878Ivăn ÔspiinoPas encore d'évaluation
- Guía de Aprendizaje Unidad 1Document4 pagesGuía de Aprendizaje Unidad 1JukiiPas encore d'évaluation
- Silabo Elect - de Potencia AplicadaDocument5 pagesSilabo Elect - de Potencia AplicadaGilmer Bejarano EulogioPas encore d'évaluation
- RS MK - II Español..Document20 pagesRS MK - II Español..Fernando Javier LeivaPas encore d'évaluation
- Semana 06 NGN GetDocument60 pagesSemana 06 NGN Getdixiprica25Pas encore d'évaluation
- Equipo Básico Del Laboratorio de ElectrónicaDocument5 pagesEquipo Básico Del Laboratorio de ElectrónicashirlyPas encore d'évaluation
- Capacitacion Fatek y WeintekDocument16 pagesCapacitacion Fatek y WeintekAlexsander Vasquez100% (1)
- CONEXIONEXTERNAT100MDDocument9 pagesCONEXIONEXTERNAT100MDFelico AguirrePas encore d'évaluation
- Teoria de ValvulasDocument51 pagesTeoria de ValvulasanyeloPas encore d'évaluation
- Laboratorio 2Document11 pagesLaboratorio 2Cesar Cordova FuentesPas encore d'évaluation
- Migrat Pp004 Es eDocument2 pagesMigrat Pp004 Es eAlvaro Domínguez VillegasPas encore d'évaluation
- Syllabus AutomatismosDocument7 pagesSyllabus AutomatismosJhon Fredy MartinPas encore d'évaluation
- Cisco Packet Tracer PDFDocument8 pagesCisco Packet Tracer PDFNestor RamirezPas encore d'évaluation
- Expo PLCDocument35 pagesExpo PLCKrish PowerPas encore d'évaluation
- Variador de FrecuenciaDocument7 pagesVariador de FrecuenciaOscar David PérezPas encore d'évaluation
- Samba PLCDocument8 pagesSamba PLCSosa RosasPas encore d'évaluation
- Tableros ElectricosDocument16 pagesTableros ElectricosAV IkkiPas encore d'évaluation
- Cuadro ComparativoDocument4 pagesCuadro Comparativofabian sanchez vasquezPas encore d'évaluation
- Megado 6Document321 pagesMegado 6rickiaqpPas encore d'évaluation
- Usb - Configuración e Implementación de Medidor para Automatización de Unidad de GeneraciónDocument92 pagesUsb - Configuración e Implementación de Medidor para Automatización de Unidad de GeneraciónrjrcorreoPas encore d'évaluation
- Catalogo Sica IndustrialDocument24 pagesCatalogo Sica IndustrialmiguelarcienegaPas encore d'évaluation
- Informe 3.finalDocument11 pagesInforme 3.finalDaniel OrtizPas encore d'évaluation
- MFA404 - U1 - DR1 (1) (4) Documento Recurso N°1Document55 pagesMFA404 - U1 - DR1 (1) (4) Documento Recurso N°1Jorge ZamoraPas encore d'évaluation
- Electricidad Industrial BasicaDocument2 pagesElectricidad Industrial BasicaMaximiliano DreyerPas encore d'évaluation
- Guía de Actividades y Rúbrica de Evaluación - Fase 1 - Presentar Solución Al Problema Del Interruptor CrepuscularDocument13 pagesGuía de Actividades y Rúbrica de Evaluación - Fase 1 - Presentar Solución Al Problema Del Interruptor CrepuscularomarPas encore d'évaluation
- Silabo Telematica 2 (2019 B)Document4 pagesSilabo Telematica 2 (2019 B)Manuel Garay GutierrezPas encore d'évaluation
- ModbusDocument1 pageModbusBryam CabreraPas encore d'évaluation
- LAB 1 Mantenimiento Electromecanico D2Document10 pagesLAB 1 Mantenimiento Electromecanico D2Dimas CaceresPas encore d'évaluation
- PLC TecsupDocument3 pagesPLC TecsupElvis Ortega LandeoPas encore d'évaluation
- Trabajos de Instrumentacion para La Parada de PlantaDocument1 pageTrabajos de Instrumentacion para La Parada de PlantaElmer HuashuayoPas encore d'évaluation
- Unidades de Medicion ElectricaDocument3 pagesUnidades de Medicion ElectricaSantiago BuriticaPas encore d'évaluation
- Instrumentación INTELIGENTEDocument30 pagesInstrumentación INTELIGENTEpablosky33Pas encore d'évaluation
- Control InteligenteDocument63 pagesControl InteligenteKarlos RamirezPas encore d'évaluation
- Tesis Completa PLC ScadaDocument117 pagesTesis Completa PLC ScadaCristian Mellado Cid75% (4)
- DiagramaChancado InstrumentalDocument14 pagesDiagramaChancado InstrumentalEymi Gianella Layza EscobarPas encore d'évaluation
- Sistemas de Procesos IndustrialesDocument23 pagesSistemas de Procesos IndustrialesFernandoPas encore d'évaluation
- Curso de Programación PLC 2020 - v2Document45 pagesCurso de Programación PLC 2020 - v2AugustoPas encore d'évaluation
- Lenguajes de Programación para PLCDocument4 pagesLenguajes de Programación para PLCLibardo CabreraPas encore d'évaluation
- Manual PLCDocument49 pagesManual PLCDamian100% (2)
- 1.silabo Electrónica de Potencia PDFDocument6 pages1.silabo Electrónica de Potencia PDFFranckehimer Johannes Quesada FasanandoPas encore d'évaluation
- Actividad 2 - Sergio Andrés Bonilla CalderónDocument5 pagesActividad 2 - Sergio Andrés Bonilla CalderónSergio AndresPas encore d'évaluation
- Actividad Semana 2Document6 pagesActividad Semana 2Luis Fernando Duran GutierrezPas encore d'évaluation
- Estudio de Caso Comparación de ElectrodomésticosDocument2 pagesEstudio de Caso Comparación de Electrodomésticosjorge100% (1)
- Taller de Radiocomunicaciones II SeguimientoDocument2 pagesTaller de Radiocomunicaciones II SeguimientojorgePas encore d'évaluation
- Estudio de Caso Comparación de ElectrodomésticosDocument2 pagesEstudio de Caso Comparación de Electrodomésticosjorge100% (1)
- Informe Leer La FacturaDocument4 pagesInforme Leer La FacturajorgePas encore d'évaluation
- Taller de Radiocomunicaciones II SeguimientoDocument2 pagesTaller de Radiocomunicaciones II SeguimientojorgePas encore d'évaluation
- Curso SenaDocument1 pageCurso SenajorgePas encore d'évaluation
- Ejercicios LOGO v8Document4 pagesEjercicios LOGO v8jorgePas encore d'évaluation
- Empresa y Tipos de SociedadDocument4 pagesEmpresa y Tipos de Sociedadjorge100% (1)
- Actividad 1 Funcionamiento Maquinas RotativasDocument4 pagesActividad 1 Funcionamiento Maquinas RotativasjorgePas encore d'évaluation
- Curso Maquinas RotativasDocument2 pagesCurso Maquinas RotativasjorgePas encore d'évaluation
- Curso SenaDocument1 pageCurso SenajorgePas encore d'évaluation
- ACTIVIDAD 4 PLC en Sistemas ScadaDocument5 pagesACTIVIDAD 4 PLC en Sistemas ScadajorgePas encore d'évaluation
- ACTIVIDAD 2 PLC en Sistemas ScadaDocument5 pagesACTIVIDAD 2 PLC en Sistemas Scadajorge100% (1)
- Actividad 1 Funcionamiento Maquinas RotativasDocument4 pagesActividad 1 Funcionamiento Maquinas RotativasjorgePas encore d'évaluation
- Transferencia Del CalorDocument8 pagesTransferencia Del CalorLucas WalkerPas encore d'évaluation
- Fomento Al Perfeccionamiento Pedagógico de Los Docentes1Document43 pagesFomento Al Perfeccionamiento Pedagógico de Los Docentes1Anonymous iIHNAlPas encore d'évaluation
- Introducción Al Control Numérico ComputarizadoDocument22 pagesIntroducción Al Control Numérico ComputarizadoJohan Emmanuel Rogel BanderasPas encore d'évaluation
- Informe Practicas Abs AtomDocument44 pagesInforme Practicas Abs AtomPercy Jave AzabachePas encore d'évaluation
- Catalogo Frasat Junio 2020Document4 pagesCatalogo Frasat Junio 2020Richard HuamaniPas encore d'évaluation
- Un Negocio ImpecableDocument1 pageUn Negocio ImpecableDaniela ChPas encore d'évaluation
- Guia FisicaDocument6 pagesGuia FisicaAngie AzuajePas encore d'évaluation
- Fcab PDFDocument3 pagesFcab PDFJ Aníbal HenríquezPas encore d'évaluation
- Obtención de Etanol Anhidro Desnaturalizado A Partir Del Ácido AcéticoDocument28 pagesObtención de Etanol Anhidro Desnaturalizado A Partir Del Ácido AcéticoCristian Condori JaraPas encore d'évaluation
- Estanque Con Agitación PDFDocument105 pagesEstanque Con Agitación PDFIgnacio Alvarez MendozaPas encore d'évaluation
- VDLRR Ev1.3 QFDocument11 pagesVDLRR Ev1.3 QFVanessa De la RosaPas encore d'évaluation
- Carlos HellerDocument21 pagesCarlos HellerLuis Gustavo MartinezPas encore d'évaluation
- Tarea 3 de Orientacion VocacionalDocument4 pagesTarea 3 de Orientacion VocacionalHeidy BuenoPas encore d'évaluation
- Caso ClínicoDocument21 pagesCaso ClínicoPedro Armando López BarreraPas encore d'évaluation
- Ejercicio EvaDocument12 pagesEjercicio EvaVH YorbelPas encore d'évaluation
- Gerencia Estrategica y Prospectiva - CmiDocument9 pagesGerencia Estrategica y Prospectiva - CmilucyPas encore d'évaluation
- Informe Analisis ProblematicaDocument9 pagesInforme Analisis ProblematicaDayana CubidesPas encore d'évaluation
- Contactos CofeprisDocument243 pagesContactos CofeprisCésar PorrasPas encore d'évaluation
- ISO TC251 WG4 MACAM May 2017 ES2Document4 pagesISO TC251 WG4 MACAM May 2017 ES2Leonardo PinillaPas encore d'évaluation
- 16 Proc - Hse - 016 Procedimiento de Autorización de VisitasDocument11 pages16 Proc - Hse - 016 Procedimiento de Autorización de VisitasAzumy Lorena Lopez N. AzumyPas encore d'évaluation
- Actividades de Transferencia Del ConocimientoDocument3 pagesActividades de Transferencia Del ConocimientoJhonatan Gutierrez MonsalvoPas encore d'évaluation
- Colector Ciclónico de PolvoDocument17 pagesColector Ciclónico de PolvoPierre799es100% (1)
- El AdverbioDocument13 pagesEl AdverbioEsdrasRiosPas encore d'évaluation
- InformesDocument96 pagesInformesJose Carlos MartinezPas encore d'évaluation