Vous aimerez peut-être aussi
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Analog Circuit Design 1996Document408 pagesAnalog Circuit Design 1996sureshiitmPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- 11 - Small-Signal Transistor Amplifiers PDFDocument14 pages11 - Small-Signal Transistor Amplifiers PDFsgw67100% (1)
- Transmission Line Circuits and RF Circuits Networksd AnalysisDocument70 pagesTransmission Line Circuits and RF Circuits Networksd AnalysisechakhaouiPas encore d'évaluation
- ECS LAB Manual - For Students PDFDocument40 pagesECS LAB Manual - For Students PDFmirehoPas encore d'évaluation
- Jawaharlal Nehru Technological University Anantapur: Implementation of G ParametersDocument19 pagesJawaharlal Nehru Technological University Anantapur: Implementation of G ParametersKollimarala Srinivasa raoPas encore d'évaluation
- 101 2018 0 BDocument32 pages101 2018 0 BRixizoNgobeniPas encore d'évaluation
- Eddu Current Testing Reference From LP ProjectDocument34 pagesEddu Current Testing Reference From LP ProjectTahir AbbasPas encore d'évaluation
- 9 Cuadro de Flujo de La Funcion de Control RCS - PV351Document24 pages9 Cuadro de Flujo de La Funcion de Control RCS - PV351MarcoPas encore d'évaluation
- Example Scattering ParametersDocument4 pagesExample Scattering ParametersYohannes NakachewPas encore d'évaluation
- Mathematics-Ii: B. Tech II Semester Regular/Supplementary Examinations, June - 2018Document23 pagesMathematics-Ii: B. Tech II Semester Regular/Supplementary Examinations, June - 2018ManjukaviPas encore d'évaluation
- Network Theory PDFDocument51 pagesNetwork Theory PDFLokeshPas encore d'évaluation
- Lowe BS T 2015Document90 pagesLowe BS T 2015irfanWPKPas encore d'évaluation
- Evaluation of H ParametersDocument5 pagesEvaluation of H Parameterssarath1993Pas encore d'évaluation
- Tutorial 2 Transmission Line PDFDocument5 pagesTutorial 2 Transmission Line PDFMonique DianePas encore d'évaluation
- Power System - Ii Lab Manual (EE-328) Vi Semester Electrical EngineeringDocument22 pagesPower System - Ii Lab Manual (EE-328) Vi Semester Electrical EngineeringRahul DuttaPas encore d'évaluation
- Lecture Notes 3-5Document12 pagesLecture Notes 3-5Yohannes NakachewPas encore d'évaluation
- Circuit Analysis A Nagoor Kani Full ChapterDocument67 pagesCircuit Analysis A Nagoor Kani Full Chapterdavid.spencer880100% (8)
- Branch ModelingDocument19 pagesBranch ModelingkeerthanavijayaPas encore d'évaluation
- Spice-Simulation For NoiseDocument10 pagesSpice-Simulation For NoiseTabletaUnicaPas encore d'évaluation
- L14 15 ABCD and S ParametersDocument15 pagesL14 15 ABCD and S ParametersAmeya KadamPas encore d'évaluation
- Circuit Design of The Loaded-Line Phase ShifterDocument9 pagesCircuit Design of The Loaded-Line Phase Shifterriccardo tarelliPas encore d'évaluation
- FEE322 Lecture 3 - Two Port Network Parameters (2) - 2hrsDocument53 pagesFEE322 Lecture 3 - Two Port Network Parameters (2) - 2hrsali aziadPas encore d'évaluation
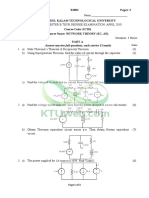
- Answer Answer Any Two Full Questions, Each Carries 15 Marks MarksDocument3 pagesAnswer Answer Any Two Full Questions, Each Carries 15 Marks MarksanuPas encore d'évaluation
- NAS Lab ManualDocument25 pagesNAS Lab ManualPurvansh Jain100% (1)
- Ps-Ii Lecture Notes PDFDocument47 pagesPs-Ii Lecture Notes PDFa.keerthiPas encore d'évaluation
- R07 SYLLABUS For DipDocument83 pagesR07 SYLLABUS For Dipikram1984Pas encore d'évaluation
- EET285-Dynamic Circuits and SystemsDocument9 pagesEET285-Dynamic Circuits and SystemsDeepa M SPas encore d'évaluation
- St. Thomas College of Engineering & Technology KozhuvalloorDocument3 pagesSt. Thomas College of Engineering & Technology KozhuvalloorsyulmnmdPas encore d'évaluation
- Electronic Circuits Chapter 3: Multistage Amplifier and Differential AmplifierDocument22 pagesElectronic Circuits Chapter 3: Multistage Amplifier and Differential AmplifierBùi Quốc AnPas encore d'évaluation
- Instructional Module: Republic of The Philippines Nueva Vizcaya State University Bambang, Nueva VizcayaDocument14 pagesInstructional Module: Republic of The Philippines Nueva Vizcaya State University Bambang, Nueva VizcayaMae MakelbaPas encore d'évaluation