Vous aimerez peut-être aussi
- Cummins QSB6.7 Engine Spare Parts Catalog: Part Number DescriptionDocument12 pagesCummins QSB6.7 Engine Spare Parts Catalog: Part Number DescriptionsanouPas encore d'évaluation
- 02 ClutchDocument14 pages02 ClutchBeary McBeary100% (1)
- Static Relays: Prepared byDocument56 pagesStatic Relays: Prepared byLavanyaPas encore d'évaluation
- WMF PRESTO-1400-Service-Manual2 PDFDocument40 pagesWMF PRESTO-1400-Service-Manual2 PDFOlimpiu EnachePas encore d'évaluation
- Grounding requirements for concrete foundations and portable magazinesDocument2 pagesGrounding requirements for concrete foundations and portable magazinesTorvik14Pas encore d'évaluation
- SI210 SystemDocument17 pagesSI210 SystemAgus YohanesPas encore d'évaluation
- Daihatsu Type K3 Engine Service Manual No.9737 No.9332 No. 9237 Emission Control System PDFDocument11 pagesDaihatsu Type K3 Engine Service Manual No.9737 No.9332 No. 9237 Emission Control System PDFMozes SimataaPas encore d'évaluation
- Automated Waste Segregator Using Arduino-Ijaerdv05i0542857Document7 pagesAutomated Waste Segregator Using Arduino-Ijaerdv05i0542857Daniel BabuPas encore d'évaluation
- Water Trash CollectorDocument3 pagesWater Trash CollectorInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Design and Development of Automatic Whiteboard Cleaner For Effective Cleaning Mechanism Using ArduinoDocument5 pagesDesign and Development of Automatic Whiteboard Cleaner For Effective Cleaning Mechanism Using ArduinoHumnesa LegesePas encore d'évaluation
- 2STM - JoMA E DUSTBINDocument8 pages2STM - JoMA E DUSTBINBhairavi MorePas encore d'évaluation
- 6 - Design and Development of Automatic Whiteboard Cleaner For Effective CleaningDocument4 pages6 - Design and Development of Automatic Whiteboard Cleaner For Effective CleaningAnonymous xaeuoo4Pas encore d'évaluation
- Remote-Controlled 360° Rotating Robotic Arm for Sewage CleaningDocument3 pagesRemote-Controlled 360° Rotating Robotic Arm for Sewage CleaningBala SubramanianPas encore d'évaluation
- Design of River Waste Collector Machine Using Arduino: AbstractDocument9 pagesDesign of River Waste Collector Machine Using Arduino: AbstractLyza Jane Angon ContranoPas encore d'évaluation
- Industrial Pipe Cleaning and Inspection RobotDocument11 pagesIndustrial Pipe Cleaning and Inspection Robotn pallaviPas encore d'évaluation
- Automatic Waste Segregation System Using Image RecognitionDocument4 pagesAutomatic Waste Segregation System Using Image RecognitionMahanshu ChaudhariPas encore d'évaluation
- Design and Manufacturing of Drainage Cleaning System: Akash Bhosale, Saurabh Khodal, Ajinkya Khude, Swapnil KolpukeDocument4 pagesDesign and Manufacturing of Drainage Cleaning System: Akash Bhosale, Saurabh Khodal, Ajinkya Khude, Swapnil KolpukeMesfin Mamo HailePas encore d'évaluation
- Pedal Operated Grinding and Drilling MachineDocument4 pagesPedal Operated Grinding and Drilling MachineNeha SinghPas encore d'évaluation
- Automatic Speed Control Based On IotDocument5 pagesAutomatic Speed Control Based On IotDhruva CasPas encore d'évaluation
- Robotic Pool Cleaning Machine Using ArduinoDocument9 pagesRobotic Pool Cleaning Machine Using ArduinoIJRASETPublicationsPas encore d'évaluation
- I - MESCON 18Document3 pagesI - MESCON 18rock starPas encore d'évaluation
- Terms and DefinitionsDocument2 pagesTerms and DefinitionsVoulen Joy SarenoPas encore d'évaluation
- Design and Development of Automatic Center Stand For Two WheelerDocument9 pagesDesign and Development of Automatic Center Stand For Two WheelerInternational Journal of Innovations in Engineering and SciencePas encore d'évaluation
- A Project Report On Automatic DrainDocument14 pagesA Project Report On Automatic DrainZubair NotezaiPas encore d'évaluation
- IoT Controlled Grass Cutter With Solar PDocument7 pagesIoT Controlled Grass Cutter With Solar PNikko Dumaliang13Pas encore d'évaluation
- Solar Powerd Water Surface Garbage Collecting BoatDocument3 pagesSolar Powerd Water Surface Garbage Collecting BoatAhsan KhanPas encore d'évaluation
- IJCRT2004001Document3 pagesIJCRT2004001Rehana TahasildarPas encore d'évaluation
- IJRTI2304047Document4 pagesIJRTI2304047Himanshu KumarPas encore d'évaluation
- Robotics FullDocument8 pagesRobotics FullDineshPas encore d'évaluation
- Vaishali Paper (Finalized)Document4 pagesVaishali Paper (Finalized)soumiyaPas encore d'évaluation
- 17 201805105-H PDFDocument4 pages17 201805105-H PDFrock starPas encore d'évaluation
- Semi Automated Wireless Beach Cleaning RobotDocument3 pagesSemi Automated Wireless Beach Cleaning RobotSanchit KapoorPas encore d'évaluation
- Automatic Open Drain Cleaning SystemDocument5 pagesAutomatic Open Drain Cleaning SystemIJRASETPublicationsPas encore d'évaluation
- Design and Assembly of Prototype of Automatic Rail Track Cleaning MachineDocument3 pagesDesign and Assembly of Prototype of Automatic Rail Track Cleaning MachineGirishZopePas encore d'évaluation
- Prototyping of Mini CNC Milling Machine Using MicrocontrollerDocument12 pagesPrototyping of Mini CNC Milling Machine Using MicrocontrollerAye Chan AungPas encore d'évaluation
- Design, Fabrication and Testing of Human Powered Water PurifierDocument8 pagesDesign, Fabrication and Testing of Human Powered Water PurifierIJRASETPublicationsPas encore d'évaluation
- Semi-Automatic Solar Powered Grass CutterDocument9 pagesSemi-Automatic Solar Powered Grass CutterIJRASETPublicationsPas encore d'évaluation
- De 5th Sem FinalDocument30 pagesDe 5th Sem FinalAnkit SinghPas encore d'évaluation
- Portable Self-Sustaining Electric Generator: March 2014Document8 pagesPortable Self-Sustaining Electric Generator: March 2014Shivam ThakurPas encore d'évaluation
- Android App Controlled Automobile Screw Jack For Light and Heavy TransportDocument9 pagesAndroid App Controlled Automobile Screw Jack For Light and Heavy TransportIJRASETPublicationsPas encore d'évaluation
- Portable PDFDocument8 pagesPortable PDFAhmedPas encore d'évaluation
- Automatic Garbage Collector Machine Cleans Drainage SystemsDocument3 pagesAutomatic Garbage Collector Machine Cleans Drainage Systemspramo_dassPas encore d'évaluation
- Automatic Domestic Vaccum CleanerDocument5 pagesAutomatic Domestic Vaccum CleanerIJRASETPublicationsPas encore d'évaluation
- Automatic Drain CleanerDocument19 pagesAutomatic Drain Cleanerkshitu gargPas encore d'évaluation
- PlasticDocument26 pagesPlasticAnonymous qh5UUGTPas encore d'évaluation
- 3 DOF ManipulatorDocument6 pages3 DOF ManipulatorKhaled SaadPas encore d'évaluation
- Design and Fabrication of AutomatedDocument7 pagesDesign and Fabrication of AutomatedMesfin Mamo HailePas encore d'évaluation
- Reverse Gear Mechanism For Handicapped PersonDocument4 pagesReverse Gear Mechanism For Handicapped PersonKoushik VimalanPas encore d'évaluation
- Ijaer Cmss CNCDocument11 pagesIjaer Cmss CNCDuy TrầnPas encore d'évaluation
- Electrochemical MachiningDocument9 pagesElectrochemical MachiningMahaManthraPas encore d'évaluation
- Ijcrt1704337 PDFDocument6 pagesIjcrt1704337 PDFS.A.Y JAGA JEEVA KUMARPas encore d'évaluation
- Design and Analysis of Remote Operated Water Bodies Cleaning MachineDocument4 pagesDesign and Analysis of Remote Operated Water Bodies Cleaning MachineInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- 360 Degree Conveyor Belt PDFDocument4 pages360 Degree Conveyor Belt PDFUpendra BingundiPas encore d'évaluation
- Fin Irjmets1654971148Document5 pagesFin Irjmets1654971148kumarvivek73793Pas encore d'évaluation
- Literature Review On Solar Grass CutterDocument4 pagesLiterature Review On Solar Grass Cutterc5e83cmhPas encore d'évaluation
- Rehana ShoudhDocument13 pagesRehana ShoudhRehana TahasildarPas encore d'évaluation
- Ambient Assistive Navigator GreenDocument25 pagesAmbient Assistive Navigator Greens021Pas encore d'évaluation
- Design Implementation of Light Following RobotDocument25 pagesDesign Implementation of Light Following RobotABHAY KUMARPas encore d'évaluation
- Arduino at Work: The Hylozoic Soil Control SytemDocument3 pagesArduino at Work: The Hylozoic Soil Control Sytemsmeneses741Pas encore d'évaluation
- Fabrication of Automated Drain Gutter Cleaner SystemDocument29 pagesFabrication of Automated Drain Gutter Cleaner SystemDinesh Kumar100% (2)
- Remote Controlled Unmanned River Cleaning Bot IJERTV10IS030314Document4 pagesRemote Controlled Unmanned River Cleaning Bot IJERTV10IS030314Rao RaoPas encore d'évaluation
- Voice Control Wheelchair AppDocument7 pagesVoice Control Wheelchair Appgar gorPas encore d'évaluation
- Fin Irjmets1681151844Document4 pagesFin Irjmets1681151844WAGLE AMOLPas encore d'évaluation
- Solar Based Wireless Grass CutterDocument5 pagesSolar Based Wireless Grass CutterIJSTE100% (2)
- Fundamentals of Electromigration-Aware Integrated Circuit DesignD'EverandFundamentals of Electromigration-Aware Integrated Circuit DesignPas encore d'évaluation
- Ws World BrotherhoodDocument6 pagesWs World BrotherhoodRenan DelamidePas encore d'évaluation
- An Error Occurred, Your PDF Could Not Be CreatedDocument1 pageAn Error Occurred, Your PDF Could Not Be CreatedRenan DelamidePas encore d'évaluation
- DO - s2019 - 007 DepEd School Calendar SY 2019-2020Document11 pagesDO - s2019 - 007 DepEd School Calendar SY 2019-2020TheSummitExpress98% (121)
- "Teacher'S Diary": Submitted By: Renan DelamideDocument2 pages"Teacher'S Diary": Submitted By: Renan DelamideRenan DelamidePas encore d'évaluation
- Giant Rubik's CubeDocument27 pagesGiant Rubik's CubeRenan DelamidePas encore d'évaluation
- Which Picture Shows ? Which Picture Shows ? 4 1 3 4 3 1Document5 pagesWhich Picture Shows ? Which Picture Shows ? 4 1 3 4 3 1Renan DelamidePas encore d'évaluation
- Special ProductDocument6 pagesSpecial ProductClaudio Doydoy CartinPas encore d'évaluation
- Unit Overview: Electricity and MagnetismDocument10 pagesUnit Overview: Electricity and MagnetismVaneza SantiagoPas encore d'évaluation
- SCM 012-130 SaeDocument12 pagesSCM 012-130 SaekazdanoPas encore d'évaluation
- View Parker Pneumatic Valvair II Series Valves BookmarksDocument10 pagesView Parker Pneumatic Valvair II Series Valves Bookmarksalvaro cardenasPas encore d'évaluation
- Pe 001Document216 pagesPe 001erivan bernardoPas encore d'évaluation
- Kyocera KM 1650 PhotocopierDocument280 pagesKyocera KM 1650 PhotocopierOm Mostafa Yasser100% (1)
- Ba Bfk458 enDocument52 pagesBa Bfk458 enWalterLlenqueTrellesPas encore d'évaluation
- A Project Report On Avr Micro Controller Development SystemDocument8 pagesA Project Report On Avr Micro Controller Development SystemGold KnowinPas encore d'évaluation
- 1.load Test On DC Shut MotorDocument5 pages1.load Test On DC Shut Motorg3v5Pas encore d'évaluation
- Titan9000 HighlightsDocument14 pagesTitan9000 HighlightsArif KurniawanPas encore d'évaluation
- NH Evaporator: Form 610.10-SED2 (FEB 2010)Document28 pagesNH Evaporator: Form 610.10-SED2 (FEB 2010)Juan LezamaPas encore d'évaluation
- Chapter 7 Notes Computer OrganizationDocument20 pagesChapter 7 Notes Computer OrganizationsriPas encore d'évaluation
- MS v00 MPC2030 MPC2050 MPC2530 MPC2550 PDFDocument1 169 pagesMS v00 MPC2030 MPC2050 MPC2530 MPC2550 PDFEdmundo SanchezPas encore d'évaluation
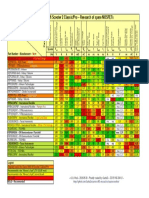
- Xiaomi M365 Mi Scooter 2 Classic-Pro - Research of Spare MOSFETs - v1.0.4 Final - 2019-09-30Document1 pageXiaomi M365 Mi Scooter 2 Classic-Pro - Research of Spare MOSFETs - v1.0.4 Final - 2019-09-30JGSoftPas encore d'évaluation
- SPRINGER GMBH EPOCAST Grouting Chock Resin - BoltingDocument4 pagesSPRINGER GMBH EPOCAST Grouting Chock Resin - BoltingMachineryeng100% (1)
- Siemslvbh3610 SpecDocument66 pagesSiemslvbh3610 SpecLD Jr FrancisPas encore d'évaluation
- Bersemuka LDocument7 pagesBersemuka LPK K0% (1)
- Helioscope Simulation 13233814 SummaryDocument3 pagesHelioscope Simulation 13233814 SummaryandisaputrawuPas encore d'évaluation
- Diesel - TDI - Axius - Gen - 2 - Option - Overview - Rev 5A - GeneralDocument8 pagesDiesel - TDI - Axius - Gen - 2 - Option - Overview - Rev 5A - GeneralJairPedroniPas encore d'évaluation
- Sop Normally Opened Ball Valve Functionality TestDocument13 pagesSop Normally Opened Ball Valve Functionality Testapi-538504186Pas encore d'évaluation
- Avionics Full NotesDocument126 pagesAvionics Full Notesnandhakumar sPas encore d'évaluation
- LFXX OD1 1C LCLCDocument8 pagesLFXX OD1 1C LCLCKanasai 89Pas encore d'évaluation
- Tech Spec of Gas Cutting Set PDFDocument3 pagesTech Spec of Gas Cutting Set PDFVipin SomasekharanPas encore d'évaluation
- NV Setup Manual en 201003Document150 pagesNV Setup Manual en 201003Paola NoMás DicenPas encore d'évaluation