Vous aimerez peut-être aussi
- Borang KPI Permohonan TAPA MSH Lampiran Permohonan TAPADocument1 pageBorang KPI Permohonan TAPA MSH Lampiran Permohonan TAPAHarith HnryusanPas encore d'évaluation
- GLS614 - CHAPTER 1C - Acoustic PositioningDocument59 pagesGLS614 - CHAPTER 1C - Acoustic PositioningHarith HnryusanPas encore d'évaluation
- GLS614 - CHAPTER 2 - Underwater Acoustic and SonarDocument11 pagesGLS614 - CHAPTER 2 - Underwater Acoustic and SonarHarith HnryusanPas encore d'évaluation
- GLS614 - CHAPTER 4 - Side Scan SonarDocument9 pagesGLS614 - CHAPTER 4 - Side Scan SonarHarith HnryusanPas encore d'évaluation
- GLS614 - CHAPTER 3 - SoundingDocument44 pagesGLS614 - CHAPTER 3 - SoundingHarith HnryusanPas encore d'évaluation
- Geocentric Datum For Malaysia: Implementation and ImplicationsDocument15 pagesGeocentric Datum For Malaysia: Implementation and Implicationsahmad bahiyuddin21Pas encore d'évaluation
- The National Academies Press: The Global Positioning System: A Shared National Asset (1995)Document285 pagesThe National Academies Press: The Global Positioning System: A Shared National Asset (1995)Harith HnryusanPas encore d'évaluation
- Fundamentals of GPS: P.L.N. RajuDocument30 pagesFundamentals of GPS: P.L.N. RajuPranab PrajapatiPas encore d'évaluation
- Using Wide Area Differential Gps To Improve Total System Error For Precision Flight OperationsDocument144 pagesUsing Wide Area Differential Gps To Improve Total System Error For Precision Flight OperationsHarith HnryusanPas encore d'évaluation
- Triangulation and Trilateration: J. Uren Et Al., Surveying For Engineers © J. Uren and W. F. Price 1985Document2 pagesTriangulation and Trilateration: J. Uren Et Al., Surveying For Engineers © J. Uren and W. F. Price 1985Harith HnryusanPas encore d'évaluation
- Post Processing of Multiple GPS Receivers To Enhance Baseline AccDocument95 pagesPost Processing of Multiple GPS Receivers To Enhance Baseline AccHarith HnryusanPas encore d'évaluation
- Blewitt Basics of GPSDocument46 pagesBlewitt Basics of GPSSachitra Nirman MalwattePas encore d'évaluation
- Using Wide Area Differential Gps To Improve Total System Error For Precision Flight OperationsDocument144 pagesUsing Wide Area Differential Gps To Improve Total System Error For Precision Flight OperationsHarith HnryusanPas encore d'évaluation
- 3D Cadastre in MalaysiaDocument26 pages3D Cadastre in MalaysiaHarith HnryusanPas encore d'évaluation
- E-Fact 14 - Hazards and Risks Associated With Manual Handling in The WorkplaceDocument30 pagesE-Fact 14 - Hazards and Risks Associated With Manual Handling in The WorkplaceFar-East MessiPas encore d'évaluation
- Water 09 00777Document16 pagesWater 09 00777Harith HnryusanPas encore d'évaluation
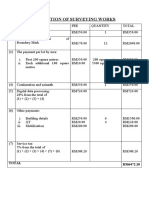
- Quotation of Surveying WorksDocument1 pageQuotation of Surveying WorksHarith HnryusanPas encore d'évaluation
- TUTORIAL 3 - Circular Curve Calculation PDFDocument1 pageTUTORIAL 3 - Circular Curve Calculation PDFHarith HnryusanPas encore d'évaluation
- GEO270-Chapter 4 (GPS Bias and Error)Document38 pagesGEO270-Chapter 4 (GPS Bias and Error)Harith HnryusanPas encore d'évaluation
- 1 Amalgamation FlowchartDocument2 pages1 Amalgamation FlowchartHarith HnryusanPas encore d'évaluation
- Blewitt Basics of GPSDocument46 pagesBlewitt Basics of GPSSachitra Nirman MalwattePas encore d'évaluation
- 1955 Jun 331-339Document9 pages1955 Jun 331-339Harith HnryusanPas encore d'évaluation
- Chapter 1 - Introduction To CartographyDocument23 pagesChapter 1 - Introduction To CartographyHarith Hnryusan100% (2)
- Aasav4n1spl 12Document6 pagesAasav4n1spl 12Harith HnryusanPas encore d'évaluation
- MK Depan Assignment Gls280Document1 pageMK Depan Assignment Gls280Harith HnryusanPas encore d'évaluation
- Universiti Teknologi Mara, Perlis Assignment GLS310Document1 pageUniversiti Teknologi Mara, Perlis Assignment GLS310Harith HnryusanPas encore d'évaluation
- What Is A Topographic MapDocument9 pagesWhat Is A Topographic MapmussaverPas encore d'évaluation
- What Is A Topographic MapDocument12 pagesWhat Is A Topographic MapHarith HnryusanPas encore d'évaluation
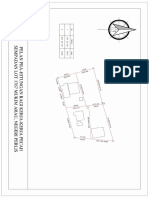
- SubdivideDocument1 pageSubdivideHarith HnryusanPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Mini Project 2B 6th SemesterDocument28 pagesMini Project 2B 6th SemesterRohit Singh RajputPas encore d'évaluation
- AQUATOOL A Generalized Decision Support System For Water Resources Planning and Operational Management 1996 Journal of HydrologyDocument23 pagesAQUATOOL A Generalized Decision Support System For Water Resources Planning and Operational Management 1996 Journal of Hydrologyhoc_kinowPas encore d'évaluation
- TRM Reb670Document490 pagesTRM Reb670jayapalPas encore d'évaluation
- Mechanics of Solids by Crandall, Dahl, Lardner, 2nd ChapterDocument118 pagesMechanics of Solids by Crandall, Dahl, Lardner, 2nd Chapterpurijatin100% (2)
- Digital Image ProcessingDocument71 pagesDigital Image ProcessingPratibha SharmaPas encore d'évaluation
- DI CaseletesDocument9 pagesDI Caseletessprem4353Pas encore d'évaluation
- Welding Symbols & Weld PreparationsDocument54 pagesWelding Symbols & Weld PreparationsAmirtha Thiyagaraajan AlagesanPas encore d'évaluation
- Solar and Lunar Eclipses1-1Document17 pagesSolar and Lunar Eclipses1-1THERESA JPas encore d'évaluation
- Fatty Acid SynthesisDocument28 pagesFatty Acid Synthesishassanainshahi13Pas encore d'évaluation
- Answer Key - CK-12 Chapter 01 Basic Geometry Concepts PDFDocument16 pagesAnswer Key - CK-12 Chapter 01 Basic Geometry Concepts PDFValery Liz0% (1)
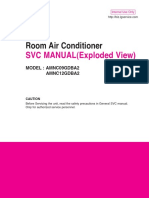
- Service Manual - Amnc09gdba2, Amnc12gdba2Document6 pagesService Manual - Amnc09gdba2, Amnc12gdba2U Kyaw San OoPas encore d'évaluation
- Development of A Continuous Microchannel CrystallizerDocument4 pagesDevelopment of A Continuous Microchannel CrystallizerchenabeelPas encore d'évaluation
- Why Might Some People Regard Science As The Supreme Form of All KnowledgeDocument4 pagesWhy Might Some People Regard Science As The Supreme Form of All KnowledgexxxsyedxxPas encore d'évaluation
- Lerdge-Gcode List V3.0.5Document108 pagesLerdge-Gcode List V3.0.5osman perez vidalPas encore d'évaluation
- MATHSDocument221 pagesMATHSAbdulai FornahPas encore d'évaluation
- Course Syllabus SHS General Physics 1 (Stem, MELC) SY 2021-2022Document14 pagesCourse Syllabus SHS General Physics 1 (Stem, MELC) SY 2021-2022Eushane Chiya SyPas encore d'évaluation
- Asmi-52: 2/4-Wire SHDSL ModemDocument4 pagesAsmi-52: 2/4-Wire SHDSL ModemManuel FreirePas encore d'évaluation
- Jain 2018Document10 pagesJain 2018Pablo Ignacio Contreras EstradaPas encore d'évaluation
- Horizontal Vessel Support: Vertical Saddle ReactionsDocument12 pagesHorizontal Vessel Support: Vertical Saddle ReactionsSanket BhaleraoPas encore d'évaluation
- Heat Exchanger-Design and ConstructionDocument46 pagesHeat Exchanger-Design and ConstructionMohd Jamal Mohd Moktar100% (2)
- Introduction To Software TestingDocument42 pagesIntroduction To Software TestingRoxanaPas encore d'évaluation
- 5000 KW Gearbox High Pinion Bearing Temperatures 1644227029Document7 pages5000 KW Gearbox High Pinion Bearing Temperatures 1644227029MC APas encore d'évaluation
- ThinkSmart Hub SpecDocument5 pagesThinkSmart Hub SpecJose LopezPas encore d'évaluation
- Error MsgsDocument162 pagesError Msgsapi-19417993Pas encore d'évaluation
- RLC-circuits With Cobra4 Xpert-Link: (Item No.: P2440664)Document14 pagesRLC-circuits With Cobra4 Xpert-Link: (Item No.: P2440664)fatjonmusli2016100% (1)
- Department of Mechanical Engineering Question Bank Subject Name: Heat & Mass Transfer Unit - I Conduction Part - ADocument3 pagesDepartment of Mechanical Engineering Question Bank Subject Name: Heat & Mass Transfer Unit - I Conduction Part - AkarthikPas encore d'évaluation
- Thermal Engineering For The Construction of Large Concrete Arch DamsDocument10 pagesThermal Engineering For The Construction of Large Concrete Arch DamsOscar LopezPas encore d'évaluation
- Chapter 5 - Electric FieldDocument5 pagesChapter 5 - Electric FieldTHIÊN LÊ TRẦN THUẬNPas encore d'évaluation
- Important QuestionsDocument8 pagesImportant QuestionsdineshbabuPas encore d'évaluation