Vous aimerez peut-être aussi
- Statistic Example ProblemDocument16 pagesStatistic Example ProblemAi manPas encore d'évaluation
- Tablas EstadísticasDocument4 pagesTablas EstadísticasAADS SASAPas encore d'évaluation
- Computer Assisted Exercises and Training: A Reference GuideD'EverandComputer Assisted Exercises and Training: A Reference GuidePas encore d'évaluation
- Performance Data: Model QAF845Document5 pagesPerformance Data: Model QAF845yr5391917Pas encore d'évaluation
- Smoothing of Multivariate Data: Density Estimation and VisualizationD'EverandSmoothing of Multivariate Data: Density Estimation and VisualizationÉvaluation : 3 sur 5 étoiles3/5 (1)
- Product Hollow Sections 1Document2 pagesProduct Hollow Sections 1smvisuPas encore d'évaluation
- Time Slow Trial 1 Slow Trial 2 Slow Trial 3 Fast Trial 1Document1 pageTime Slow Trial 1 Slow Trial 2 Slow Trial 3 Fast Trial 1Jason LiebsonPas encore d'évaluation
- Degrees of Freedom Probability, P: T-TableDocument1 pageDegrees of Freedom Probability, P: T-TableAhmed TemamPas encore d'évaluation
- F-Table Research Methodology 2 - Design of Experiments and OptimizationDocument3 pagesF-Table Research Methodology 2 - Design of Experiments and Optimizationsandeep_2262Pas encore d'évaluation
- Tabel F: (DF) V Degrees of Freedom For NumeratorDocument1 pageTabel F: (DF) V Degrees of Freedom For NumeratorAjeng PratiwiPas encore d'évaluation
- Appendix 16. Statistical TablesDocument5 pagesAppendix 16. Statistical TablesgombossandorPas encore d'évaluation
- INTERGROWTH-21st Weight Standards Boys - Pdf.crdownloadDocument2 pagesINTERGROWTH-21st Weight Standards Boys - Pdf.crdownloadmerosas1301Pas encore d'évaluation
- STD DeviationDocument8 pagesSTD Deviationmon mocedaPas encore d'évaluation
- Hollow SectionsDocument14 pagesHollow SectionsdinPas encore d'évaluation
- ตารางเหล็กDocument41 pagesตารางเหล็กสิทธิชัย หอมจรรย์Pas encore d'évaluation
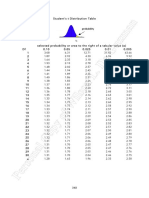
- Students Distribution TableDocument1 pageStudents Distribution TableLeonard Anthony DeladiaPas encore d'évaluation
- Dimensions Properties ... BS 4848-4:1972 (Superseded by BS EN 10056-1:1999)Document1 pageDimensions Properties ... BS 4848-4:1972 (Superseded by BS EN 10056-1:1999)rosemaryPas encore d'évaluation
- Ten Year Survey Survey Sample Customer Satisfaction Employee Satisfaction Job SatisfactionDocument4 pagesTen Year Survey Survey Sample Customer Satisfaction Employee Satisfaction Job SatisfactionImran AziziPas encore d'évaluation
- Apéndice B: B.4 Valores Críticos de La Distribución F en Un Nivel de Significancia de 5%Document2 pagesApéndice B: B.4 Valores Críticos de La Distribución F en Un Nivel de Significancia de 5%anthonyMPas encore d'évaluation
- Critical Values of The F-Distribution: Table A.6Document4 pagesCritical Values of The F-Distribution: Table A.6Faris Izzatur RahmanPas encore d'évaluation
- Bracing Calculations (3.3m Walls)Document34 pagesBracing Calculations (3.3m Walls)Rajeshwari NarayanamoorthyPas encore d'évaluation
- INTERGROWTH-21st Weight Standards GirlsDocument2 pagesINTERGROWTH-21st Weight Standards GirlsNeeraj VermaPas encore d'évaluation
- Hiap Chuan Spore - Hollow - SectionsDocument14 pagesHiap Chuan Spore - Hollow - Sectionstpop1707Pas encore d'évaluation
- OMS17-3328 Pocket Blast Guide CS6 2021 WebDocument66 pagesOMS17-3328 Pocket Blast Guide CS6 2021 Webyanromulo@gmail.com100% (1)
- Tables T StudentDocument2 pagesTables T Studentmariapappalardo02Pas encore d'évaluation
- INTERGROWTH-21st Weight Z Scores BoysDocument2 pagesINTERGROWTH-21st Weight Z Scores BoysGoentor P JoeangPas encore d'évaluation
- DSM Data SetDocument267 pagesDSM Data SetSaif KhanPas encore d'évaluation
- Site WorkDocument9 pagesSite WorkAbera MamoPas encore d'évaluation
- 4 - 5947019371120429006econo F-TableDocument2 pages4 - 5947019371120429006econo F-TableBizu AtnafuPas encore d'évaluation
- M I and X X X yDocument6 pagesM I and X X X ymaneeshmogallpuPas encore d'évaluation
- ProjectDocument8 pagesProjectsamrawit aysheshimPas encore d'évaluation
- Quality Assurance (MSN 4213) Assignment 2: Submitted byDocument6 pagesQuality Assurance (MSN 4213) Assignment 2: Submitted bybilal buttPas encore d'évaluation
- Calcul de Lot ICTDocument3 pagesCalcul de Lot ICTBison FutéPas encore d'évaluation
- FIsica 3 LabDocument3 pagesFIsica 3 LabMICHAELL KLUIVERTH SALAZAR RODRIGUEZPas encore d'évaluation
- Pumps Head Calculation SheetDocument3 pagesPumps Head Calculation SheetDesigner Forever100% (2)
- Job Satisfaction StatisticsDocument4 pagesJob Satisfaction StatisticsJoy GinesPas encore d'évaluation
- Ftable DistribusiDocument1 pageFtable Distribusi12starswith1lightPas encore d'évaluation
- F DistributionDocument4 pagesF DistributionaltarescessPas encore d'évaluation
- Angle Bar Dimension & WeightDocument1 pageAngle Bar Dimension & Weightanjangandak2932Pas encore d'évaluation
- Example 1Document5 pagesExample 1Louise GermainePas encore d'évaluation
- Lampiran StatistikDocument6 pagesLampiran Statistikmarselius igangPas encore d'évaluation
- Carbon Steel PipeDocument3 pagesCarbon Steel Pipesaravoot_jPas encore d'évaluation
- Optical Splitter RatioDocument11 pagesOptical Splitter RatioAlbert AloepchaPas encore d'évaluation
- Tabla D3 Duncan Statistics ControlDocument3 pagesTabla D3 Duncan Statistics ControlOscar SotomayorPas encore d'évaluation
- 042 Anova2way1Document5 pages042 Anova2way1anuragbose0429Pas encore d'évaluation
- Multiple Linear RegressionsDocument9 pagesMultiple Linear RegressionsDevendra ChowdaryPas encore d'évaluation
- L Angle Data SheetDocument2 pagesL Angle Data SheetSaleem BashaPas encore d'évaluation
- Tide Data Analysis and Chart DatumDocument6 pagesTide Data Analysis and Chart DatumEko DarmaPas encore d'évaluation
- Fisica 04Document2 pagesFisica 04Daniela Alessandra Suárez RamírezPas encore d'évaluation
- Consteel Hot Finished Hollow SectionsDocument13 pagesConsteel Hot Finished Hollow SectionsAnonymous dWa1xtpKmfPas encore d'évaluation
- Tablas CDocument20 pagesTablas CCamilo Josė AlarcónPas encore d'évaluation
- Book - Steel TableDocument120 pagesBook - Steel Tablevisarut100% (1)
- Astm A500 SHS 1Document4 pagesAstm A500 SHS 1Wong JowoPas encore d'évaluation
- Laboratorio Virtual Mecanica - Velocidades A y B 19 y 20 de MayoDocument31 pagesLaboratorio Virtual Mecanica - Velocidades A y B 19 y 20 de MayoLAURA NEITA PICOPas encore d'évaluation
- Astm Pipe Standard TableDocument1 pageAstm Pipe Standard Tabletien_298Pas encore d'évaluation
- Hamid Assignment - 1 ss1 19 2Document13 pagesHamid Assignment - 1 ss1 19 2PohuyistPas encore d'évaluation
- Precast Concrete Block Egg-Shaped Drain (Pcbesd) : SY PerundingDocument4 pagesPrecast Concrete Block Egg-Shaped Drain (Pcbesd) : SY PerundingGan Chin PhangPas encore d'évaluation
- Pipe SCDocument1 pagePipe SCJaganmatha BharanidharanPas encore d'évaluation
- Circuit CalcsDocument1 pageCircuit Calcsapi-297584767Pas encore d'évaluation
- Rotary Axis 2: Figure 25: Arm 2Document5 pagesRotary Axis 2: Figure 25: Arm 2api-297584767Pas encore d'évaluation
- GrippercalcsDocument3 pagesGrippercalcsapi-297584767Pas encore d'évaluation
- Rotary Axis OneDocument8 pagesRotary Axis Oneapi-297584767Pas encore d'évaluation
- Step 1: Cut Edges To Length Using Vertical Band SawDocument13 pagesStep 1: Cut Edges To Length Using Vertical Band Sawapi-297584767Pas encore d'évaluation
- Sean KolesarDocument1 pageSean Kolesarapi-297584767Pas encore d'évaluation
- LibraryresearchguidedocDocument1 pageLibraryresearchguidedocapi-297584767Pas encore d'évaluation
- Full Depth Deck Panel ManualDocument25 pagesFull Depth Deck Panel ManualHinawan Teguh SantosoPas encore d'évaluation
- Steel and Timber Structures Part Two:: Design of Structural Steel MembersDocument28 pagesSteel and Timber Structures Part Two:: Design of Structural Steel MembersDhinesh KalaimaranPas encore d'évaluation
- 2009 06 02 Library-Cache-LockDocument9 pages2009 06 02 Library-Cache-LockAbdul WahabPas encore d'évaluation
- 支持允許多個 Vlan 的 Trunk 接口。: Techtalk/Td-P/58419Document6 pages支持允許多個 Vlan 的 Trunk 接口。: Techtalk/Td-P/58419000-924680Pas encore d'évaluation
- Sequential Reliability TestsDocument2 pagesSequential Reliability Teststanpreet_makkadPas encore d'évaluation
- Fatique Lecture NotesDocument41 pagesFatique Lecture NotesMarcel SilvaPas encore d'évaluation
- QT 5 Inferential Chi SquareDocument23 pagesQT 5 Inferential Chi SquareSaad MasoodPas encore d'évaluation
- Linear Programming: Simplex Method: Dr. R. K Singh Professor, Operations Management MDI, GurgaonDocument58 pagesLinear Programming: Simplex Method: Dr. R. K Singh Professor, Operations Management MDI, GurgaonvsyoiPas encore d'évaluation
- PDS Example Collection 24-01-11 - Open PDFDocument52 pagesPDS Example Collection 24-01-11 - Open PDFMichael GarrisonPas encore d'évaluation
- Escape Velocity PDFDocument5 pagesEscape Velocity PDFRatriPas encore d'évaluation
- Certification of eVTOL AircraftDocument19 pagesCertification of eVTOL AircraftrlwersalPas encore d'évaluation
- Experiment 6Document11 pagesExperiment 6CarlosLorenzoSaninPas encore d'évaluation
- Using Synonyms As Context CluesDocument11 pagesUsing Synonyms As Context Cluesapi-405390959Pas encore d'évaluation
- Operation & Maintenance: A160-Om-C-May15Document66 pagesOperation & Maintenance: A160-Om-C-May15Thomas AliPas encore d'évaluation
- Quarter 1 Week 1Document6 pagesQuarter 1 Week 1GhghaaaPas encore d'évaluation
- Siggberg WartsilaDocument27 pagesSiggberg WartsilaSenthil KumarPas encore d'évaluation
- BLM 343 Course BookDocument966 pagesBLM 343 Course Bookarda1940Pas encore d'évaluation
- Commissioning Example 797Document15 pagesCommissioning Example 797linkangjun0621Pas encore d'évaluation
- Hot-Forged 6082 Suspension PartsDocument13 pagesHot-Forged 6082 Suspension Partsfkaram1965Pas encore d'évaluation
- On Predicting Roller Milling Performance Part II. The Breakage FunctionDocument13 pagesOn Predicting Roller Milling Performance Part II. The Breakage FunctionKenneth AdamsPas encore d'évaluation
- 10K Ductile Cast Iron Gate Valve (Flange Type) TOYO VALVE Gate ValvesDocument4 pages10K Ductile Cast Iron Gate Valve (Flange Type) TOYO VALVE Gate ValvesFredie LabradorPas encore d'évaluation
- Kalman FilterDocument14 pagesKalman FilterNeetaa MunjalPas encore d'évaluation
- Fastener NoteDocument8 pagesFastener NoteAmit PrajapatiPas encore d'évaluation
- 2003 831 01 - Fiber Optic AttenuatorDocument51 pages2003 831 01 - Fiber Optic AttenuatorchopanalvarezPas encore d'évaluation
- Binocular Vision Development, Depth Perception and DisordersDocument275 pagesBinocular Vision Development, Depth Perception and DisordersJuliana ToméPas encore d'évaluation
- For More ACCA Study Materials, Tutor Support, Exam Tips VisitDocument2 pagesFor More ACCA Study Materials, Tutor Support, Exam Tips VisitNeel KostoPas encore d'évaluation
- Cbse - Department of Skill Education Curriculum For Session 2021-2022Document13 pagesCbse - Department of Skill Education Curriculum For Session 2021-2022Dushyant SinghPas encore d'évaluation
- The Role of Cutoffs in Integrated Reservoir StudiesDocument15 pagesThe Role of Cutoffs in Integrated Reservoir StudiesAhmed M. Saad100% (1)
- ECODRIVE - ошибки и предупрежденияDocument6 pagesECODRIVE - ошибки и предупрежденияАндрей ПетряхинPas encore d'évaluation
- Lebanese International University: CSCI 250 - Introduction To Programming - TEST-2: Student Name: Student IDDocument5 pagesLebanese International University: CSCI 250 - Introduction To Programming - TEST-2: Student Name: Student IDralf tamerPas encore d'évaluation