Vous aimerez peut-être aussi
- Manual Canbus 2Document170 pagesManual Canbus 2Martin100% (2)
- 186 CAN-Bus de DatosDocument30 pages186 CAN-Bus de Datosoxot100% (1)
- Sistemas de Seguridad - ABS - TCS - ESP PDFDocument194 pagesSistemas de Seguridad - ABS - TCS - ESP PDFantoniPas encore d'évaluation
- EEC03 Diagnóstico de Las Redes de Comunicación AutomotricesDocument94 pagesEEC03 Diagnóstico de Las Redes de Comunicación AutomotricesEsteban MunaresPas encore d'évaluation
- Sistemas de Inyección DieselDocument7 pagesSistemas de Inyección Dieselj luis VillegasPas encore d'évaluation
- Sistema de Control Del Motor: ÍndiceDocument396 pagesSistema de Control Del Motor: ÍndiceHéctor mendozaPas encore d'évaluation
- VW LOCALIIZACION DE AVERIAS CAN BUS CONFORT RDMF PDFDocument27 pagesVW LOCALIIZACION DE AVERIAS CAN BUS CONFORT RDMF PDFDanny Cruz MendozaPas encore d'évaluation
- Manual AmarokDocument67 pagesManual AmarokBorisPas encore d'évaluation
- Tecnica de Gases de EscapeDocument36 pagesTecnica de Gases de EscapeFranTSB100% (1)
- Present (CD) PDFDocument52 pagesPresent (CD) PDFPamela Ramos SánchezPas encore d'évaluation
- Inyección Directa Gasolina, MercedesDocument72 pagesInyección Directa Gasolina, MercedesMiguel Angel Gambin100% (1)
- Thinkcar KeyProgrammer Int PanDocument14 pagesThinkcar KeyProgrammer Int PanRMG motorsPas encore d'évaluation
- JGHFFHDocument58 pagesJGHFFHESGUAR INSTRUCTORESPas encore d'évaluation
- Gestión Electrónica Diesel PDFDocument15 pagesGestión Electrónica Diesel PDFRuddy DúxPas encore d'évaluation
- Sistemas Multiplexados.Document9 pagesSistemas Multiplexados.Emilio Cortes0% (1)
- Diagnostico Con Los Gases de EscapeDocument41 pagesDiagnostico Con Los Gases de EscapeElias Jesus NievesPas encore d'évaluation
- Capacitacion Inyeccion DieselDocument190 pagesCapacitacion Inyeccion Dieselpitufo_75Pas encore d'évaluation
- 020.curso Esi-KtsDocument76 pages020.curso Esi-KtsANTONIO RUGAMAPas encore d'évaluation
- Memoria EEPROMDocument18 pagesMemoria EEPROMDenis Arturo Zarate VictoriaPas encore d'évaluation
- Diag OsciDocument147 pagesDiag OsciGerman Gustavo100% (2)
- Manual CruzeDocument178 pagesManual CruzeMaximo IzquierdoPas encore d'évaluation
- ¿Qué Es El CAN BUS y Cómo Funciona - INGENIERÍA Y MECÁNICA AUTOMOTRIZDocument4 pages¿Qué Es El CAN BUS y Cómo Funciona - INGENIERÍA Y MECÁNICA AUTOMOTRIZVictor A Ortega DPas encore d'évaluation
- Sensores y Actuadores SeatDocument48 pagesSensores y Actuadores SeatMarco Zepeda100% (4)
- Protocolos de Comunicación y Sistema Multiplexado AutomotrizDocument18 pagesProtocolos de Comunicación y Sistema Multiplexado AutomotrizKinito Méndez100% (4)
- Tablero 4Document15 pagesTablero 4Oscar PeñaPas encore d'évaluation
- 569 - El Cambio Manual 0AX de 6 MarchasDocument28 pages569 - El Cambio Manual 0AX de 6 Marchasol100% (1)
- Sistemas InmovilizadoresDocument4 pagesSistemas Inmovilizadoresjalvarez_385073Pas encore d'évaluation
- Scanner X 431 Pro 3Document5 pagesScanner X 431 Pro 3Giovanni MoralesPas encore d'évaluation
- Ssp235es - El Volante MultifuncionDocument0 pageSsp235es - El Volante MultifuncionCorvett PineaplePas encore d'évaluation
- VW Lupo 1.4 TDIDocument85 pagesVW Lupo 1.4 TDIPaulo Marcelo100% (1)
- CURSO MEMORIAS y MCUS PDFDocument93 pagesCURSO MEMORIAS y MCUS PDFMarcelo SosaPas encore d'évaluation
- 073-Sistema LPG en Vehiculos SkodaDocument48 pages073-Sistema LPG en Vehiculos SkodaFranTSBPas encore d'évaluation
- SSP 990163 2017 Audi Q7 Introduction - Pdf.en - EsDocument74 pagesSSP 990163 2017 Audi Q7 Introduction - Pdf.en - EsJonattan Javier Ramirez Bolaños100% (1)
- 03-Transmision Sinergica Hibrida Nhw20Document73 pages03-Transmision Sinergica Hibrida Nhw20Maria Lunes100% (2)
- Correcta Eliminacion de DPFDocument2 pagesCorrecta Eliminacion de DPFRafael OlavePas encore d'évaluation
- Análisis Del Can-Bus IIIDocument2 pagesAnálisis Del Can-Bus IIIHEYPas encore d'évaluation
- Regulacion Inteligente Del Alternador - Igr - SPDocument20 pagesRegulacion Inteligente Del Alternador - Igr - SPjimmy_burgos_11Pas encore d'évaluation
- Evolucion ABS ESPDocument41 pagesEvolucion ABS ESPAnonymous a3tl7UW48gPas encore d'évaluation
- ssp368 - El Filtro de Particulas DieselDocument22 pagesssp368 - El Filtro de Particulas DieselSergio GabrielPas encore d'évaluation
- Mantenimiento de redes multiplexadas. TMVG0209D'EverandMantenimiento de redes multiplexadas. TMVG0209Évaluation : 5 sur 5 étoiles5/5 (1)
- Modelado unidimensional de los motores de dos tiempos de pequeña cilindradaD'EverandModelado unidimensional de los motores de dos tiempos de pequeña cilindradaÉvaluation : 5 sur 5 étoiles5/5 (1)
- 1-Autodidáctico 238 CAN BusDocument32 pages1-Autodidáctico 238 CAN Busdieselcast86% (7)
- Transferencia de Datos en El Bus de Datos CAN IIDocument60 pagesTransferencia de Datos en El Bus de Datos CAN IIpablo david lozano buenoPas encore d'évaluation
- 269 Intercambio de Datos Con El CAN-Bus IIDocument60 pages269 Intercambio de Datos Con El CAN-Bus IITxnix PeñxPas encore d'évaluation
- CAN Bus BoschDocument29 pagesCAN Bus Boschapi-3850582100% (9)
- CD 286 Nuevos Sistemas Can-Bus Lin Most 1Document26 pagesCD 286 Nuevos Sistemas Can-Bus Lin Most 1Carlos ServinPas encore d'évaluation
- MultiplexadoDocument15 pagesMultiplexadoEdison Fabricio Lema ParraPas encore d'évaluation
- Sistema Can 2Document32 pagesSistema Can 2Fernando LedezmaPas encore d'évaluation
- Manual CANBUS - FULL MOTORES CHECKDocument30 pagesManual CANBUS - FULL MOTORES CHECKAriel MercochaPas encore d'évaluation
- CAN BusDocument30 pagesCAN Busapi-380678189% (18)
- 1911 ssp186 eDocument30 pages1911 ssp186 eJose Reiriz Garcia100% (1)
- Can Bus de DatosDocument170 pagesCan Bus de Datosjimmy_huamancayo100% (1)
- 24 SSP Can-Bus SkodaDocument25 pages24 SSP Can-Bus SkodaHector Enrique Alcayaga MirandaPas encore d'évaluation
- Sistema Can BusDocument29 pagesSistema Can BusDavid ParariPas encore d'évaluation
- Informe MultiplexadoDocument12 pagesInforme MultiplexadoJJ Ochoa AlvarezPas encore d'évaluation
- Can Bus Lin Most YbluetoothDocument26 pagesCan Bus Lin Most Ybluetoothcaimcaife2023Pas encore d'évaluation
- Can Bus SkodaDocument25 pagesCan Bus SkodaKaren Donoso JaraPas encore d'évaluation
- CAN Bus de DatosDocument39 pagesCAN Bus de DatosAndrés G. Prats FernándezPas encore d'évaluation
- CAN BUS VW SPDocument29 pagesCAN BUS VW SPIsmael Lenin Barahona LazoPas encore d'évaluation
- Bosch, Can BusDocument29 pagesBosch, Can BusRui MendesPas encore d'évaluation
- Bomba Rotativas FinalDocument26 pagesBomba Rotativas FinalHEYPas encore d'évaluation
- Cap - 29 Equipo de Prueba y Afinacion Del MotorDocument14 pagesCap - 29 Equipo de Prueba y Afinacion Del MotorHEYPas encore d'évaluation
- Sistema Antibloqueo de Ruedas: C.F.P.V./2003Document33 pagesSistema Antibloqueo de Ruedas: C.F.P.V./2003HEYPas encore d'évaluation
- Cap - 25 Diagnostico y Servicio de La Inyeccion Electronica Del ColbustibleDocument16 pagesCap - 25 Diagnostico y Servicio de La Inyeccion Electronica Del ColbustibleHEYPas encore d'évaluation
- TORNILLOnnTUERCAnYnESPARRAGOnn1n 77619bb33878689Document41 pagesTORNILLOnnTUERCAnYnESPARRAGOnn1n 77619bb33878689HEYPas encore d'évaluation
- Cap - 23 Sistema de Combustible Carburado Diagnostico y ServicioDocument11 pagesCap - 23 Sistema de Combustible Carburado Diagnostico y ServicioHEYPas encore d'évaluation
- Cap - 24 Sistemas Electronicos de Inyeccion de CombustibleDocument17 pagesCap - 24 Sistemas Electronicos de Inyeccion de CombustibleHEYPas encore d'évaluation
- Cap - 19 Fundamentos de Los Sistemas de EncendidoDocument11 pagesCap - 19 Fundamentos de Los Sistemas de EncendidoHEYPas encore d'évaluation
- Cap - 20 Sistemas de Encendido ElectronicoDocument13 pagesCap - 20 Sistemas de Encendido ElectronicoHEYPas encore d'évaluation
- Cap - 26 Supercargadores y Turbo CargadoresDocument13 pagesCap - 26 Supercargadores y Turbo CargadoresHEYPas encore d'évaluation
- Cap - 21diagnostico y Servicio Del Sistema de EncendidoDocument17 pagesCap - 21diagnostico y Servicio Del Sistema de EncendidoHEYPas encore d'évaluation
- Cap - 17 Operacion Yservicio Del Sistema de CargaDocument17 pagesCap - 17 Operacion Yservicio Del Sistema de CargaHEY100% (1)
- Geometria de La AlineacionDocument29 pagesGeometria de La AlineacionHEYPas encore d'évaluation
- Cap - 7 Mediciones y Rendimiento Del MotorDocument10 pagesCap - 7 Mediciones y Rendimiento Del MotorHEYPas encore d'évaluation
- Cap - 15 Construccion y Servicios de La BateriasDocument11 pagesCap - 15 Construccion y Servicios de La BateriasHEYPas encore d'évaluation
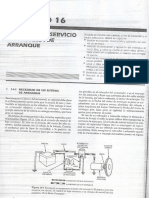
- CAP - 16 Operacion Del Sistema de ArranqueDocument16 pagesCAP - 16 Operacion Del Sistema de ArranqueHEYPas encore d'évaluation
- Cap - 14 Sistemas Electricos y Electronicos Del AutomovilDocument14 pagesCap - 14 Sistemas Electricos y Electronicos Del AutomovilHEYPas encore d'évaluation
- Cap - 10 Servicio Al Sistema de Combustible y de EscapeDocument16 pagesCap - 10 Servicio Al Sistema de Combustible y de EscapeHEYPas encore d'évaluation
- Cap - 12 Sistemas de Enfriamiento Del MotorDocument14 pagesCap - 12 Sistemas de Enfriamiento Del MotorHEY100% (1)
- Cap - 6 Introduccion A La Electricidad y A Los Controles Electronicos Del MotorDocument14 pagesCap - 6 Introduccion A La Electricidad y A Los Controles Electronicos Del MotorHEYPas encore d'évaluation
- Cap - 5 Tipos y Clasificasiones de Los MotoresDocument16 pagesCap - 5 Tipos y Clasificasiones de Los MotoresHEYPas encore d'évaluation
- Cap - 3informacion Del Trabajo y Servicio Del TallerDocument9 pagesCap - 3informacion Del Trabajo y Servicio Del TallerHEYPas encore d'évaluation
- Trasmisión de Potencia y FrenosDocument172 pagesTrasmisión de Potencia y FrenosHEYPas encore d'évaluation
- Carroceria y Lunas AutosDocument22 pagesCarroceria y Lunas AutosHEY100% (1)
- ANEXO 1. Ejercicios Circuito Serie, Paralelo y MixtoDocument3 pagesANEXO 1. Ejercicios Circuito Serie, Paralelo y MixtoHEYPas encore d'évaluation
- ANEXO 1. Ejercicios Circuito Serie, Paralelo y MixtoDocument3 pagesANEXO 1. Ejercicios Circuito Serie, Paralelo y MixtoHEYPas encore d'évaluation
- Segurudad y Confort AutomotrizDocument4 pagesSegurudad y Confort AutomotrizHEY0% (1)
- Lab 1 SensoresDocument7 pagesLab 1 SensoresGonzalo PimentelPas encore d'évaluation
- Propuesta Planificación 4° Básico MatemáticaDocument10 pagesPropuesta Planificación 4° Básico MatemáticaDiegoGaleaPas encore d'évaluation
- Encuesta PDFDocument3 pagesEncuesta PDFTony CardenasPas encore d'évaluation
- Giovanny DelgadoDocument3 pagesGiovanny DelgadoKEVIN DELGADOPas encore d'évaluation
- Elementos No Estructurales-NSR-10Document13 pagesElementos No Estructurales-NSR-10CARLOS JULIO RODRIGUEZ BELLOPas encore d'évaluation
- SENATI VIRTUAL - Atención Al ClienteDocument4 pagesSENATI VIRTUAL - Atención Al ClienteJerson Quispe100% (1)
- Ipc LjeDocument85 pagesIpc LjeEdiriosPas encore d'évaluation
- Amazon - Tics PDFDocument5 pagesAmazon - Tics PDFJuan TovarPas encore d'évaluation
- Guia Rapida Pathfinder OfficeDocument3 pagesGuia Rapida Pathfinder OfficeJoséDavid Baena SerranoPas encore d'évaluation
- Guía Partes Del ComputadorDocument6 pagesGuía Partes Del ComputadorCatalyna CreelPas encore d'évaluation
- EducomunicaciónDocument20 pagesEducomunicaciónXdaianeX100% (1)
- Diseno-De-Una-Arquitectura-Orientada-A Servicios-Para-La-Integracion-Y-Evolucion-De-Los PDFDocument88 pagesDiseno-De-Una-Arquitectura-Orientada-A Servicios-Para-La-Integracion-Y-Evolucion-De-Los PDFsoledadyanirePas encore d'évaluation
- Grupo9 - Avance Del Proyecto Final 1Document29 pagesGrupo9 - Avance Del Proyecto Final 1Gianfranco AyastaPas encore d'évaluation
- Actividad 1 Informatica 8.01 Cesar Augusto PuentesDocument2 pagesActividad 1 Informatica 8.01 Cesar Augusto PuentesCristian Alberto Lievano LizcanoPas encore d'évaluation
- Bitsdeciencia21 22Document102 pagesBitsdeciencia21 22elfonoPas encore d'évaluation
- Introducción A AhplDocument23 pagesIntroducción A AhplArturo72100% (1)
- Teatro de Usos Múltiples para La Zona Industrial de Paramillo Como Nueva Centralidad Urbana, San Cristobal Estado TáchiraDocument29 pagesTeatro de Usos Múltiples para La Zona Industrial de Paramillo Como Nueva Centralidad Urbana, San Cristobal Estado TáchiraMary PachecoPas encore d'évaluation
- Complementarios EsDocument286 pagesComplementarios EsadhPas encore d'évaluation
- Adicional La1 Julio16 Cc1013607772Document1 pageAdicional La1 Julio16 Cc1013607772jp emprendedor lionPas encore d'évaluation
- 01 - Guía de Punto Equilibrio - Ev. ProyectosDocument2 pages01 - Guía de Punto Equilibrio - Ev. ProyectosVictor Arias Arrue0% (2)
- Introducción Al HTMLDocument12 pagesIntroducción Al HTMLCriistianGM0114Pas encore d'évaluation
- Proyecto X1Document17 pagesProyecto X1Hadid Cruz cenaPas encore d'évaluation
- Sistema de Ecuaciones LinealesDocument1 pageSistema de Ecuaciones LinealesAndrea ValenciaPas encore d'évaluation
- Manual Deprácticas Admón Del Mantenimiento 02agosto 04 Abril 2022Document143 pagesManual Deprácticas Admón Del Mantenimiento 02agosto 04 Abril 2022Aldo JavierPas encore d'évaluation
- Siemens (2008) Una Breve Historia Del Aprendizaje en RedDocument9 pagesSiemens (2008) Una Breve Historia Del Aprendizaje en RedDiego Leal100% (1)
- Evaluacion Sumativa N°2 Diseño de Tronadura PDFDocument4 pagesEvaluacion Sumativa N°2 Diseño de Tronadura PDFClaudio AndrésPas encore d'évaluation
- TAREA - Ensayo Empresas Que SobresalenDocument6 pagesTAREA - Ensayo Empresas Que SobresalenIsaac Ramirez100% (2)
- Folleto Curso FM SapDocument7 pagesFolleto Curso FM SapOmar PuinPas encore d'évaluation
- Guia de Resinas Casteable y Estandar Marca InkyDocument14 pagesGuia de Resinas Casteable y Estandar Marca InkyAbraham Diaz GarciaPas encore d'évaluation
- Legajo Embol S.ADocument44 pagesLegajo Embol S.ALitzi PinedoPas encore d'évaluation