Vous aimerez peut-être aussi
- MATLAB Introduction25 116Document114 pagesMATLAB Introduction25 116Kadiyam VijayPas encore d'évaluation
- MATLAB for Beginners: A Gentle Approach - Revised EditionD'EverandMATLAB for Beginners: A Gentle Approach - Revised EditionÉvaluation : 3.5 sur 5 étoiles3.5/5 (11)
- MATLAB and Simulink In-Depth: Model-based Design with Simulink and Stateflow, User Interface, Scripting, Simulation, Visualization and Debugging (English Edition)D'EverandMATLAB and Simulink In-Depth: Model-based Design with Simulink and Stateflow, User Interface, Scripting, Simulation, Visualization and Debugging (English Edition)Pas encore d'évaluation
- Programming with MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"D'EverandProgramming with MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Évaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Essential Mathcad for Engineering, Science, and Math w/ CD: Essential Mathcad for Engineering, Science, and Math w/ CDD'EverandEssential Mathcad for Engineering, Science, and Math w/ CD: Essential Mathcad for Engineering, Science, and Math w/ CDPas encore d'évaluation
- Rarefied Gas DynamicsD'EverandRarefied Gas DynamicsK KaramchetiÉvaluation : 5 sur 5 étoiles5/5 (1)
- ANSYS Workbench 2023 R2: A Tutorial Approach, 6th EditionD'EverandANSYS Workbench 2023 R2: A Tutorial Approach, 6th EditionPas encore d'évaluation
- Solenoid Actuators: Theory and Computational MethodsD'EverandSolenoid Actuators: Theory and Computational MethodsÉvaluation : 3 sur 5 étoiles3/5 (1)
- Advanced Seat Suspension Control System Design for Heavy Duty VehiclesD'EverandAdvanced Seat Suspension Control System Design for Heavy Duty VehiclesPas encore d'évaluation
- ANSYS Mechanical APDL for Finite Element AnalysisD'EverandANSYS Mechanical APDL for Finite Element AnalysisÉvaluation : 4.5 sur 5 étoiles4.5/5 (8)
- Essential PTC® Mathcad Prime® 3.0: A Guide for New and Current UsersD'EverandEssential PTC® Mathcad Prime® 3.0: A Guide for New and Current UsersÉvaluation : 4 sur 5 étoiles4/5 (12)
- Worked Examples in Engineering Field Theory: Applied Electricity and Electronics DivisionD'EverandWorked Examples in Engineering Field Theory: Applied Electricity and Electronics DivisionÉvaluation : 3 sur 5 étoiles3/5 (2)
- Additive Manufacturing A Complete Guide - 2020 EditionD'EverandAdditive Manufacturing A Complete Guide - 2020 EditionPas encore d'évaluation
- Engineering and Scientific Computations Using MATLABD'EverandEngineering and Scientific Computations Using MATLABPas encore d'évaluation
- Introduction to Mathematical Fluid DynamicsD'EverandIntroduction to Mathematical Fluid DynamicsÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Control of DC Motor Using Different Control StrategiesD'EverandControl of DC Motor Using Different Control StrategiesPas encore d'évaluation
- Matlab in Mechanical Engineering, Simulink Overview and ExamplesDocument20 pagesMatlab in Mechanical Engineering, Simulink Overview and ExamplesEren Tutar100% (1)
- Demystifying Numerical Models: Step-by Step Modeling of Engineering SystemsD'EverandDemystifying Numerical Models: Step-by Step Modeling of Engineering SystemsÉvaluation : 2 sur 5 étoiles2/5 (1)
- Introduction To Matlab SimulinkDocument45 pagesIntroduction To Matlab SimulinkSami KasawatPas encore d'évaluation
- Design Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationD'EverandDesign Optimization of Fluid Machinery: Applying Computational Fluid Dynamics and Numerical OptimizationPas encore d'évaluation
- The Theory of Matrices in Numerical AnalysisD'EverandThe Theory of Matrices in Numerical AnalysisÉvaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Battery management system Complete Self-Assessment GuideD'EverandBattery management system Complete Self-Assessment GuidePas encore d'évaluation
- Modern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989D'EverandModern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989J. E. MottersheadPas encore d'évaluation
- The Mathematics of Finite Elements and Applications: Proceedings of the Brunel University Conference of the Institute of Mathematics and Its Applications Held in April 1972D'EverandThe Mathematics of Finite Elements and Applications: Proceedings of the Brunel University Conference of the Institute of Mathematics and Its Applications Held in April 1972J.R. WhitemanPas encore d'évaluation
- Matlab ExamDocument25 pagesMatlab ExamAliceAlormenuPas encore d'évaluation
- Engineering mathematics The Ultimate Step-By-Step GuideD'EverandEngineering mathematics The Ultimate Step-By-Step GuidePas encore d'évaluation
- MATLAB Guide for EngineersDocument120 pagesMATLAB Guide for Engineerssohail66794154100% (6)
- Design and Development of A Pendulum Type Dynamic Vibration Absorber For A Sdof Vibrating System Subjected To Base ExcitationDocument15 pagesDesign and Development of A Pendulum Type Dynamic Vibration Absorber For A Sdof Vibrating System Subjected To Base ExcitationIAEME PublicationPas encore d'évaluation
- NASA's James Webb Space Telescope Support Structure Analysis Using MSC NastranDocument2 pagesNASA's James Webb Space Telescope Support Structure Analysis Using MSC NastranMSC SoftwarePas encore d'évaluation
- Electric DrivesDocument91 pagesElectric DrivesS.m. FerdousPas encore d'évaluation
- Throughout This Document X and y Will Be Either Row or Column Vectors and A Will Always Be A MatrixDocument2 pagesThroughout This Document X and y Will Be Either Row or Column Vectors and A Will Always Be A MatrixAlexis marcialPas encore d'évaluation
- Computer-Aided Kinematics and Dynamics of MechanicDocument14 pagesComputer-Aided Kinematics and Dynamics of MechanicvishnavjPas encore d'évaluation
- Modeling of Mechanical SystemsDocument99 pagesModeling of Mechanical SystemsDontKnowwPas encore d'évaluation
- WK 14 - Intro To FEA and ANSYS WorkbenchDocument7 pagesWK 14 - Intro To FEA and ANSYS WorkbenchMian AsimPas encore d'évaluation
- CFD Analysis of Electronics Chip Cooling PDFDocument129 pagesCFD Analysis of Electronics Chip Cooling PDFPritam GolePas encore d'évaluation
- Ansys 14 TheoryDocument826 pagesAnsys 14 TheorySubhasish MitraPas encore d'évaluation
- CFD Analysis of ManifoldDocument27 pagesCFD Analysis of ManifoldsravitejaPas encore d'évaluation
- Shock Analysis of On-Board Equipment Submitted To Underwater Explosion PDFDocument16 pagesShock Analysis of On-Board Equipment Submitted To Underwater Explosion PDFFernando Raúl LADINOPas encore d'évaluation
- Solving Vibration Problems with MATLAB and MAPLEDocument170 pagesSolving Vibration Problems with MATLAB and MAPLESam67% (3)
- Chapter - 4: Matrix OperationsDocument56 pagesChapter - 4: Matrix OperationsBurak IşıkPas encore d'évaluation
- Matlab Based Finite Element Analysis in A Vibrations ClassDocument26 pagesMatlab Based Finite Element Analysis in A Vibrations ClassChangbum YuPas encore d'évaluation
- Intro To MathcadDocument13 pagesIntro To Mathcadrmelo2010Pas encore d'évaluation
- Fluid Mechanics Turbomachinery - GATE 2020 PDFDocument34 pagesFluid Mechanics Turbomachinery - GATE 2020 PDFRavi khakhkharPas encore d'évaluation
- The Finite Element MethodDocument13 pagesThe Finite Element Methodnkuriza jean damascenePas encore d'évaluation
- Control Example Using MatlabDocument37 pagesControl Example Using MatlabRizkie Denny PratamaPas encore d'évaluation
- Kevin Russell - Qiong Shen - Raj S. Sodhi - Kinematics and Dynamics of Mechanical Systems - Implementation in MATLAB® and SimMechanics®-CRC Press (2018) PDFDocument535 pagesKevin Russell - Qiong Shen - Raj S. Sodhi - Kinematics and Dynamics of Mechanical Systems - Implementation in MATLAB® and SimMechanics®-CRC Press (2018) PDFMARCUS.VARANIS874850% (2)
- A Phase-Field Model For Fracture in Biological Tissues: Arun Raina Christian MieheDocument18 pagesA Phase-Field Model For Fracture in Biological Tissues: Arun Raina Christian MieheAditya TiwariPas encore d'évaluation
- O. Gültekin - Numerical Aspects of AnisotropicDocument30 pagesO. Gültekin - Numerical Aspects of AnisotropicAditya TiwariPas encore d'évaluation
- Preparing For Product InterviewsDocument137 pagesPreparing For Product InterviewsHari Krishna ThummalapellyPas encore d'évaluation
- The Improvement of Generation Z Financial Well-Being in PekanbaruDocument10 pagesThe Improvement of Generation Z Financial Well-Being in PekanbaruAditya TiwariPas encore d'évaluation
- O. Gültekin, H. Dal, G.A. Holzapfel, A Phase-Field Ap2016Document26 pagesO. Gültekin, H. Dal, G.A. Holzapfel, A Phase-Field Ap2016Aditya TiwariPas encore d'évaluation
- The Analysis of Financial Literacy and Its ImpactDocument8 pagesThe Analysis of Financial Literacy and Its ImpactAditya TiwariPas encore d'évaluation
- Fluids: Stenosis Indicators Applied To Patient-Specific Renal Arteries Without and With StenosisDocument19 pagesFluids: Stenosis Indicators Applied To Patient-Specific Renal Arteries Without and With StenosisAditya TiwariPas encore d'évaluation
- Computational Materials ScienceDocument13 pagesComputational Materials ScienceAditya TiwariPas encore d'évaluation
- Dissection Properties of The Human Aortic Media: An Experimental StudyDocument12 pagesDissection Properties of The Human Aortic Media: An Experimental StudyAditya TiwariPas encore d'évaluation
- Hemodynamics in Transplant Renal Artery Stenosis.5Document9 pagesHemodynamics in Transplant Renal Artery Stenosis.5Aditya TiwariPas encore d'évaluation
- Constitutive Modelling of Arteries Considering FibDocument11 pagesConstitutive Modelling of Arteries Considering FibAditya TiwariPas encore d'évaluation
- Numerical Simulation of Blood Flow in A Flexible Stenosed Abdominal Real AortaDocument9 pagesNumerical Simulation of Blood Flow in A Flexible Stenosed Abdominal Real AortaAditya TiwariPas encore d'évaluation
- 08 Dark AgesDocument20 pages08 Dark AgesAditya TiwariPas encore d'évaluation
- Product Requirements DocumentDocument3 pagesProduct Requirements DocumentAditya TiwariPas encore d'évaluation
- 181910076Document4 pages181910076Aditya TiwariPas encore d'évaluation
- ∞ 0 x=e YN μ, σ θ>0 β >0: Question # MS - 01 (10 + 15 (=25 marks) )Document3 pages∞ 0 x=e YN μ, σ θ>0 β >0: Question # MS - 01 (10 + 15 (=25 marks) )Aditya TiwariPas encore d'évaluation
- Lecture 1Document11 pagesLecture 1Aditya TiwariPas encore d'évaluation
- MBA663 TQM Assignment #01 CodeDocument2 pagesMBA663 TQM Assignment #01 CodeAditya TiwariPas encore d'évaluation
- Soln MidSemTest 2018 19 IIDocument3 pagesSoln MidSemTest 2018 19 IIAditya TiwariPas encore d'évaluation
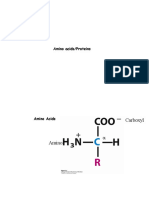
- Lif 101 Biomolecule 2-2Document36 pagesLif 101 Biomolecule 2-2Aditya TiwariPas encore d'évaluation
- Lecture 25Document7 pagesLecture 25Aditya TiwariPas encore d'évaluation
- Nye Davide2006technologymatters Questionstolivewith - 23763Document19 pagesNye Davide2006technologymatters Questionstolivewith - 23763Aditya TiwariPas encore d'évaluation
- Controls: Nalinaksh S. Vyas Indian Ins9tute of Technology Kanpur Technology Mission For Indian RailwaysDocument15 pagesControls: Nalinaksh S. Vyas Indian Ins9tute of Technology Kanpur Technology Mission For Indian RailwaysArvind SamriyaPas encore d'évaluation
- Thermal Physics by CHARLES KITTEL and HE PDFDocument495 pagesThermal Physics by CHARLES KITTEL and HE PDFmuca11100% (2)
- Lecture 25Document7 pagesLecture 25Aditya TiwariPas encore d'évaluation
- CAD NPTEL L3.ppsxDocument67 pagesCAD NPTEL L3.ppsxAditya TiwariPas encore d'évaluation
- ME351 Lab 01 2020Document1 pageME351 Lab 01 2020Aditya TiwariPas encore d'évaluation
- Lecture 27Document6 pagesLecture 27Aditya TiwariPas encore d'évaluation
- Introduction To Arrays: ESC101 September 6Document29 pagesIntroduction To Arrays: ESC101 September 6Aditya TiwariPas encore d'évaluation
- Guide For ResumeDocument28 pagesGuide For ResumeAnonymous 3st76lpPas encore d'évaluation
- Lab 3Document6 pagesLab 3talal pervaizPas encore d'évaluation
- Unit 2 Day 6 HW m3 PDFDocument4 pagesUnit 2 Day 6 HW m3 PDFAnas AlghamdiPas encore d'évaluation
- PH1010 - Tutorial - 1Document2 pagesPH1010 - Tutorial - 1Kush Ganatra ch19b063Pas encore d'évaluation
- Mathematical Techniques 2 Semester 1 Lecture NotesDocument128 pagesMathematical Techniques 2 Semester 1 Lecture NotespatrickstewartswanPas encore d'évaluation
- Math 11-CORE Gen Math-Q1-Week-2Document15 pagesMath 11-CORE Gen Math-Q1-Week-2kenrick090% (1)
- Mixed-Integer Linear Programming (MILP) - MATLAB Intlinprog - MathWorks FranceDocument11 pagesMixed-Integer Linear Programming (MILP) - MATLAB Intlinprog - MathWorks FranceDavidPas encore d'évaluation
- Module1 Exercises PDFDocument3 pagesModule1 Exercises PDFSunit JainPas encore d'évaluation
- Long Quiz g10Document2 pagesLong Quiz g10DanecaPas encore d'évaluation
- Lagrangian and Hamiltonian Method ExplainedDocument56 pagesLagrangian and Hamiltonian Method ExplainedayuPas encore d'évaluation
- Week 4 - Impulse Response in LTIC Systems (Textbook: Ch. 3.2 - 3.4)Document21 pagesWeek 4 - Impulse Response in LTIC Systems (Textbook: Ch. 3.2 - 3.4)siarwafaPas encore d'évaluation
- PHD ThesisDocument204 pagesPHD ThesisZeinab MansourPas encore d'évaluation
- Finite Element Methods and Structural OptimizationDocument8 pagesFinite Element Methods and Structural OptimizationAjith MosesPas encore d'évaluation
- (2018) MA1103-Business Mathematics IDocument37 pages(2018) MA1103-Business Mathematics ISaskia Dila SagataPas encore d'évaluation
- Year 11 Advanced Mathematics Solving Trig Functions Questions and AnswersDocument23 pagesYear 11 Advanced Mathematics Solving Trig Functions Questions and Answerselmira.napolitorkamaniPas encore d'évaluation
- Continuity StageDocument28 pagesContinuity StageSherif Yehia Al MaraghyPas encore d'évaluation
- NEXT CHAPTER MYP UP 9 Linear RelationshipsDocument7 pagesNEXT CHAPTER MYP UP 9 Linear RelationshipsAmos D'Shalom Irush100% (1)
- The Mathematical and Philosophical Concept of VectorDocument11 pagesThe Mathematical and Philosophical Concept of VectorGeorge Mpantes mathematics teacher100% (2)
- Experiment 5A Triple Integrals: Name: Ananyaa Gupta Reg. No.: 20BCT0177 Slot: L3-L4Document7 pagesExperiment 5A Triple Integrals: Name: Ananyaa Gupta Reg. No.: 20BCT0177 Slot: L3-L4Sahil KalingPas encore d'évaluation
- Elements of Stochastic ProcessesDocument264 pagesElements of Stochastic ProcessesKashif Khalid100% (1)
- HW1 SolutionDocument9 pagesHW1 SolutionJuan Carlos TrujilloPas encore d'évaluation
- Diagnostic Test - AP CalculusDocument6 pagesDiagnostic Test - AP CalculusShannon BurtonPas encore d'évaluation
- Derivation of Continuity EquationDocument7 pagesDerivation of Continuity EquationArbiWidiyantoro100% (1)
- Vector SpaceDocument3 pagesVector SpacemahadgaashanlePas encore d'évaluation
- 3 2packetDocument6 pages3 2packetapi-327561261Pas encore d'évaluation
- Stock Watson 3U ExerciseSolutions Chapter2 StudentsDocument15 pagesStock Watson 3U ExerciseSolutions Chapter2 Studentsk_ij9658Pas encore d'évaluation
- The Quadratic Formula PresentationDocument20 pagesThe Quadratic Formula Presentationapi-442315493Pas encore d'évaluation
- Electric Circuits Driving Point FunctionsDocument4 pagesElectric Circuits Driving Point FunctionsAniruddha RoyPas encore d'évaluation
- Topic 03Document46 pagesTopic 03Solanum tuberosumPas encore d'évaluation
- Pil Unit Review2015 KeyDocument6 pagesPil Unit Review2015 Keyapi-296347043Pas encore d'évaluation
- Linear Algebra Session 2Document12 pagesLinear Algebra Session 2Vinod SawantPas encore d'évaluation