Vous aimerez peut-être aussi
- Lab 3 Protcol232Document9 pagesLab 3 Protcol232RonaldoPas encore d'évaluation
- Lab 12 ProtocolosDocument4 pagesLab 12 ProtocolosRonaldoPas encore d'évaluation
- BaronDocument9 pagesBaronRonaldoPas encore d'évaluation
- Hoy SuborDocument4 pagesHoy SuborRonaldoPas encore d'évaluation
- Nashee 777Document8 pagesNashee 777RonaldoPas encore d'évaluation
- OsmsomdDocument12 pagesOsmsomdRonaldoPas encore d'évaluation
- Subir HoyDocument13 pagesSubir HoyRonaldoPas encore d'évaluation
- Modelo CanvasDocument38 pagesModelo CanvasTania TellezPas encore d'évaluation
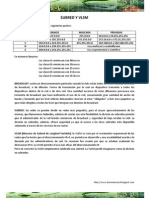
- Practica Subred y VLSMDocument8 pagesPractica Subred y VLSMjhormancely100% (2)
- Estándares de Calidad en El Ervicio de A&bDocument4 pagesEstándares de Calidad en El Ervicio de A&bNadieska GutierrezPas encore d'évaluation
- Contencioso Cuadro ComparativoDocument2 pagesContencioso Cuadro ComparativoAstrid Bethania Flores100% (1)
- Contrato de Presentación Robinsón Oswaldo Yánez ParedesDocument2 pagesContrato de Presentación Robinsón Oswaldo Yánez ParedesLisbet MeroPas encore d'évaluation
- Asignacion Beneficios 25 Años Martin Mamani ChoquehuancaDocument4 pagesAsignacion Beneficios 25 Años Martin Mamani ChoquehuancaOskar ChavitoPas encore d'évaluation
- Informe 2-Grupo 2Document5 pagesInforme 2-Grupo 2PERCYPas encore d'évaluation
- Brunner (2007) - Prometeo de Visita ALDocument7 pagesBrunner (2007) - Prometeo de Visita ALsoydementelibrePas encore d'évaluation
- Ejercicios Gradiente AritméticoDocument1 pageEjercicios Gradiente AritméticoRicardo PerazaPas encore d'évaluation
- Proyecto Cria de Cerdo (1) Eph2021Document28 pagesProyecto Cria de Cerdo (1) Eph2021lau tico100% (2)
- Encuesta ReciclajeDocument2 pagesEncuesta ReciclajeSandra Severino100% (3)
- Silabo 01201701IAAA91ADocument4 pagesSilabo 01201701IAAA91AFredy ParionaPas encore d'évaluation
- MSDS Cherteston 274Document8 pagesMSDS Cherteston 274Italo JaureguiPas encore d'évaluation
- Ensayo Unidad 5 Tecnologias de La InforacionDocument6 pagesEnsayo Unidad 5 Tecnologias de La InforacionCesar Daniel Campos Gonzalez100% (1)
- D04 Muñoz NDocument2 pagesD04 Muñoz NJavivi Vivi MuñozPas encore d'évaluation
- RUBIO - Diseño de Un Reproductor de Música Utilizando Un Enfoque Centrado en El UsuarioDocument244 pagesRUBIO - Diseño de Un Reproductor de Música Utilizando Un Enfoque Centrado en El UsuariomusicloverPas encore d'évaluation
- Mi Primera PáginaDocument47 pagesMi Primera Páginajulio neyraPas encore d'évaluation
- Revista Emprendedores - No 219 - Diciembre de 2015 PDFDocument124 pagesRevista Emprendedores - No 219 - Diciembre de 2015 PDFAndrea AlvarezPas encore d'évaluation
- 1818 - Cuestionario Electronica de Potencia PDFDocument8 pages1818 - Cuestionario Electronica de Potencia PDFElvis TubonPas encore d'évaluation
- Informe 5Document12 pagesInforme 5alejandro badilloPas encore d'évaluation
- TDR Flete TerrestreDocument2 pagesTDR Flete TerrestreWilson Cornejo100% (1)
- Caso Practico 3 Electiva Plan de MarketingDocument7 pagesCaso Practico 3 Electiva Plan de MarketingSTEVEN AMORTEGUIPas encore d'évaluation
- 20 Libros de Mineria para Descargar o Leer Gratis en Su Computadora PDFDocument4 pages20 Libros de Mineria para Descargar o Leer Gratis en Su Computadora PDFNiikoo MoralesPas encore d'évaluation
- UD 6 PPT Entorno Virtual de AprendiajeDocument28 pagesUD 6 PPT Entorno Virtual de AprendiajeManuel FerrandoPas encore d'évaluation
- Admin,+198 756 1 CEDocument9 pagesAdmin,+198 756 1 CEBarrera Peñafiel Brigette YajairaPas encore d'évaluation
- Sub PartidaDocument17 pagesSub PartidamarcosPas encore d'évaluation
- Plan de Trabajo Sva 2018Document22 pagesPlan de Trabajo Sva 2018leydi vanessaPas encore d'évaluation
- Maldonado Mayda 2 C TEORIABUROCRACIADocument4 pagesMaldonado Mayda 2 C TEORIABUROCRACIAAdyam Maldonado MoralesPas encore d'évaluation
- Herramientas Eléctricas PortátilesDocument3 pagesHerramientas Eléctricas Portátilesvictor GomezPas encore d'évaluation
- Lipovetsky - G - La - Pantalla Publicitaria en La Pantalla - Global-CompressedDocument35 pagesLipovetsky - G - La - Pantalla Publicitaria en La Pantalla - Global-CompressedJuan Soto RamirezPas encore d'évaluation
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroD'EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroÉvaluation : 4 sur 5 étoiles4/5 (1)
- Influencia. La psicología de la persuasiónD'EverandInfluencia. La psicología de la persuasiónÉvaluation : 4.5 sur 5 étoiles4.5/5 (14)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressD'EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressÉvaluation : 5 sur 5 étoiles5/5 (1)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosD'EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosÉvaluation : 4 sur 5 étoiles4/5 (16)
- 7 tendencias digitales que cambiarán el mundoD'Everand7 tendencias digitales que cambiarán el mundoÉvaluation : 4.5 sur 5 étoiles4.5/5 (87)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteD'EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteÉvaluation : 1 sur 5 étoiles1/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.D'EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Évaluation : 5 sur 5 étoiles5/5 (1)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenD'EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenÉvaluation : 5 sur 5 étoiles5/5 (8)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARED'EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREÉvaluation : 4 sur 5 étoiles4/5 (13)
- Guía para la aplicación de ISO 9001 2015D'EverandGuía para la aplicación de ISO 9001 2015Évaluation : 4 sur 5 étoiles4/5 (1)
- Radiocomunicaciones: Teoría y principiosD'EverandRadiocomunicaciones: Teoría y principiosÉvaluation : 5 sur 5 étoiles5/5 (3)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesD'EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesÉvaluation : 4.5 sur 5 étoiles4.5/5 (2)
- Electrónica básica: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESD'EverandElectrónica básica: INGENIERÍA ELECTRÓNICA Y DE LAS COMUNICACIONESÉvaluation : 5 sur 5 étoiles5/5 (16)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.D'EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Évaluation : 4 sur 5 étoiles4/5 (51)