Vous aimerez peut-être aussi
- Capitul2 PLCDocument9 pagesCapitul2 PLCCarlos QuirogaPas encore d'évaluation
- 5-Practica PLC y Perifericos.Document11 pages5-Practica PLC y Perifericos.walter choque copariPas encore d'évaluation
- Introduccion PLCDocument41 pagesIntroduccion PLClibronuevoPas encore d'évaluation
- Autómata ProgramableDocument16 pagesAutómata Programabletoa87Pas encore d'évaluation
- PLC y SensoresDocument26 pagesPLC y SensoresAlvaroPas encore d'évaluation
- Introducción Al Curso RsLogix 5000 y Conceptos Básicos.Document11 pagesIntroducción Al Curso RsLogix 5000 y Conceptos Básicos.TNastecaPas encore d'évaluation
- Arquitectura de Un PLCDocument9 pagesArquitectura de Un PLCCritian Rosas Basurco100% (3)
- Despcricion de La Estructura Interna de Un PLCDocument4 pagesDespcricion de La Estructura Interna de Un PLCOscar EugenioPas encore d'évaluation
- Cap1 BDocument14 pagesCap1 BLuis MamaniPas encore d'évaluation
- PLC'sDocument36 pagesPLC'sJefferson Enríquez100% (1)
- Modulo 4 - Lectura 3Document8 pagesModulo 4 - Lectura 3mariela mmascelloniPas encore d'évaluation
- Unidad 2 PLC Investigacion FLDocument12 pagesUnidad 2 PLC Investigacion FLRaul Alexis GarciaPas encore d'évaluation
- MMQDocument24 pagesMMQRodrigo CastilloPas encore d'évaluation
- CONTROLDocument75 pagesCONTROLLuis Jhonathan Lazo AbrilPas encore d'évaluation
- Mezclador de Liquidos Empleando PLCDocument24 pagesMezclador de Liquidos Empleando PLCNelo Franno Beltran Guevara0% (1)
- Capitulo II 1Document9 pagesCapitulo II 1Martínez Sánchez Francisco EmilianoPas encore d'évaluation
- PLCS AutomatizacionDocument25 pagesPLCS AutomatizacionEdson Franco Condori UscamaytaPas encore d'évaluation
- Grafcet AutomatizacionDocument9 pagesGrafcet AutomatizacionJose Augusto ManobandaPas encore d'évaluation
- Grafcet AutomatizacionDocument9 pagesGrafcet AutomatizacionJose Augusto ManobandaPas encore d'évaluation
- Ciclo de Scan Del ProcesadorDocument4 pagesCiclo de Scan Del ProcesadorTorrez JeanPas encore d'évaluation
- Objetivos GeneralesDocument59 pagesObjetivos GeneralesFernando CelorrioPas encore d'évaluation
- Exposicion Unidad 2 PLCsDocument21 pagesExposicion Unidad 2 PLCsMartin GomezPas encore d'évaluation
- Trabajo de PCL Carlos CastellanosDocument13 pagesTrabajo de PCL Carlos CastellanosCarlos Roberto Castellanos PaterninaPas encore d'évaluation
- PLC Avanzado PDFDocument2 pagesPLC Avanzado PDFguillemedinaq25Pas encore d'évaluation
- Escuela Profesional: Ingeniería Mecánica DOCENTE: Ing - Luis Orlando Perez PerezDocument15 pagesEscuela Profesional: Ingeniería Mecánica DOCENTE: Ing - Luis Orlando Perez PerezWilder FloresPas encore d'évaluation
- Departamento de Ingeniería Eléctrica Y ElectrónicaDocument37 pagesDepartamento de Ingeniería Eléctrica Y ElectrónicaRamon TorresPas encore d'évaluation
- UII Tarea 2 - 17490597Document9 pagesUII Tarea 2 - 17490597José G. Hernandez VegaPas encore d'évaluation
- Informe Programación de PLCDocument15 pagesInforme Programación de PLCSebastián Andrés Segovia TapiaPas encore d'évaluation
- Autómatas ProgramablesDocument8 pagesAutómatas ProgramablesKarlaMedinaPas encore d'évaluation
- Tarea 2-PLC-17221274Document12 pagesTarea 2-PLC-17221274Luis Angel Romero CarrascoPas encore d'évaluation
- Controlador Lógico Programable.Document27 pagesControlador Lógico Programable.elvisjuniorquispechoque1108Pas encore d'évaluation
- Controladores Lógicos Programables (PLC)Document12 pagesControladores Lógicos Programables (PLC)Jose Antonio Gonzalez VelasquezPas encore d'évaluation
- Unidad 6 Autc3b3matas ProgramablesDocument12 pagesUnidad 6 Autc3b3matas ProgramablesGenaro ortega aguirrePas encore d'évaluation
- Tema 2 Caracteristicas Generales Del PLCDocument8 pagesTema 2 Caracteristicas Generales Del PLCSilva Vázquez Kimberly MontserratPas encore d'évaluation
- PLC'sDocument5 pagesPLC'sSandra GarciaPas encore d'évaluation
- Manual SLC 500 para El CursoDocument74 pagesManual SLC 500 para El Cursocarlos urbinaPas encore d'évaluation
- TEMARIODocument11 pagesTEMARIOHéctor SalcidoPas encore d'évaluation
- Evaluacion Parcial 2 Eduardo Larenas, Matias Toloza, Victor CarrascoDocument12 pagesEvaluacion Parcial 2 Eduardo Larenas, Matias Toloza, Victor Carrascovictor.carrasco.meraPas encore d'évaluation
- 4 El PLCDocument0 page4 El PLCToretta AdrianPas encore d'évaluation
- Clase IIDocument45 pagesClase IIhober monjePas encore d'évaluation
- Laboratorio de Control ¿Qué Es Un PLCDocument7 pagesLaboratorio de Control ¿Qué Es Un PLCKapi096Pas encore d'évaluation
- Programación de Controladores e Interfaces de Comunicación (2) - 1Document9 pagesProgramación de Controladores e Interfaces de Comunicación (2) - 1victor.carrasco.meraPas encore d'évaluation
- PLCDocument5 pagesPLCErandi RiveraPas encore d'évaluation
- Arquitectura de Los Controladores Logísticos ProgramablesDocument8 pagesArquitectura de Los Controladores Logísticos ProgramablesjvdvddfnfbdsfsPas encore d'évaluation
- HernandezS Introduccion Programacion Step 7 SIMATIC 300Document26 pagesHernandezS Introduccion Programacion Step 7 SIMATIC 300Stalin HernandezPas encore d'évaluation
- Introducción A Los PLCDocument26 pagesIntroducción A Los PLCmmorales44Pas encore d'évaluation
- Controladores Logicos ProgramablesDocument6 pagesControladores Logicos ProgramablesJoseGamboaPas encore d'évaluation
- Arquitectura y Fundamentos Del PLCDocument11 pagesArquitectura y Fundamentos Del PLCAzu GVPas encore d'évaluation
- Manual de Asignatura PLCDocument14 pagesManual de Asignatura PLCJorge L. Aguilar MartínezPas encore d'évaluation
- Estructura y Programacion Del PLCDocument19 pagesEstructura y Programacion Del PLCvalenciaram50% (2)
- Cuestionario Tema IiDocument4 pagesCuestionario Tema IiEdwin 11Pas encore d'évaluation
- Introducción A La Programación de MicrocontroladoresDocument96 pagesIntroducción A La Programación de MicrocontroladoresVicentin LucianoPas encore d'évaluation
- Autómata ProgramableDocument12 pagesAutómata ProgramableOliver PSPas encore d'évaluation
- Laboratorio de PLCDocument4 pagesLaboratorio de PLCAdrian Ruiz TorresPas encore d'évaluation
- Introducción A Los Mandos ProgramadosDocument121 pagesIntroducción A Los Mandos Programadossteven holguinPas encore d'évaluation
- UF0852 - Instalación y actualización de sistemas operativosD'EverandUF0852 - Instalación y actualización de sistemas operativosÉvaluation : 5 sur 5 étoiles5/5 (1)
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeD'EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubePas encore d'évaluation
- Puesta en marcha de sistemas de automatización industrial. ELEM0311D'EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Évaluation : 3 sur 5 étoiles3/5 (1)
- Desarrollo y optimización de componentes software para tareas administrativas de sistemas. IFCT0609D'EverandDesarrollo y optimización de componentes software para tareas administrativas de sistemas. IFCT0609Pas encore d'évaluation
- Compilador C CCS y Simulador Proteus para Microcontroladores PICD'EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICÉvaluation : 2.5 sur 5 étoiles2.5/5 (5)
- Formas de Pago - Conarem - 2023Document9 pagesFormas de Pago - Conarem - 2023mokasinPas encore d'évaluation
- 7 MetabuscadoresDocument4 pages7 Metabuscadorestatianalopez3101Pas encore d'évaluation
- Clase 07Document12 pagesClase 07Soporte TIPas encore d'évaluation
- Registro 8 BitsDocument9 pagesRegistro 8 BitsArturo MartinezPas encore d'évaluation
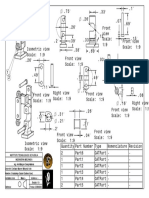
- Ensamble 2Document1 pageEnsamble 2Sarahi GallosoPas encore d'évaluation
- Casos de UsoDocument6 pagesCasos de UsoJimmyJoelMillaMartinezPas encore d'évaluation
- Taller 1 2 v1Document13 pagesTaller 1 2 v1Claudia Patricia MuneraPas encore d'évaluation
- PruebaEvaluacion3 AlejandroAldanaDocument38 pagesPruebaEvaluacion3 AlejandroAldanaaldanasrisadPas encore d'évaluation
- Topología de Redes ModificadaDocument18 pagesTopología de Redes ModificadaWendy Sanchez de PolancoPas encore d'évaluation
- Act.8 CibercafeDocument13 pagesAct.8 CibercafeAngel Gabriel Olan JuarezPas encore d'évaluation
- Manual Gescolar 2016-2017Document13 pagesManual Gescolar 2016-2017KeycerkrisbelPas encore d'évaluation
- Illiac IvDocument3 pagesIlliac IvJacqueline GarcíaPas encore d'évaluation
- 20 Palabras de Lenguaje ColoquialDocument3 pages20 Palabras de Lenguaje ColoquialLu Pastor86% (7)
- Informe Sobre Demo KasperskyDocument3 pagesInforme Sobre Demo KasperskyFabiánHurtadoPas encore d'évaluation
- Alfredo Castillo Aguilar PDFDocument1 pageAlfredo Castillo Aguilar PDFAlfredo CastilloPas encore d'évaluation
- Ensayo de Las TicDocument12 pagesEnsayo de Las TicAda Yris ValenzuelaPas encore d'évaluation
- Especificaciones Tecnicas de Los Elementos para El ConvenioDocument28 pagesEspecificaciones Tecnicas de Los Elementos para El ConveniowilsonPas encore d'évaluation
- UnefaDocument49 pagesUnefajoinerjs2021Pas encore d'évaluation
- TRABAJO FINAL Quinto BachilleratoDocument19 pagesTRABAJO FINAL Quinto BachilleratoDayanna RodriguezPas encore d'évaluation
- Curriculum 2017-Darlin RDocument19 pagesCurriculum 2017-Darlin RrommmelPas encore d'évaluation
- Práctica Filtros FIR IIR Parte 1Document2 pagesPráctica Filtros FIR IIR Parte 1Francisco Carlos CalderonPas encore d'évaluation
- Practica 4 PDIDocument8 pagesPractica 4 PDIJuan Carlos Mendoza LimaPas encore d'évaluation
- TALLERnGA2n220501096nAA2nEV01 77635c06abc0988Document11 pagesTALLERnGA2n220501096nAA2nEV01 77635c06abc0988Fernando GranadosPas encore d'évaluation
- Taller STPDocument2 pagesTaller STPFabian OrtegaPas encore d'évaluation
- Organización de Datos EstadísticosDocument21 pagesOrganización de Datos EstadísticosJimmy ChoquePas encore d'évaluation
- Cómo Escanear Archivos PDF en Un HP Scanjet 5590Document2 pagesCómo Escanear Archivos PDF en Un HP Scanjet 5590rbaoshPas encore d'évaluation
- UninetDocument53 pagesUninetGNAVIAAPas encore d'évaluation
- Fraude en Telecomunicaciones1Document72 pagesFraude en Telecomunicaciones1Luis CanchiñaPas encore d'évaluation
- Hardware Interno de Una ComputadoraDocument5 pagesHardware Interno de Una ComputadoraChrystal CastlePas encore d'évaluation
- Modelo Canvas PDFDocument1 pageModelo Canvas PDFLord KingShadow69Pas encore d'évaluation