Vous aimerez peut-être aussi
- Troubleshooting AlarmsDocument78 pagesTroubleshooting Alarmsphanlinh198767% (9)
- SPI Interface - HC595 UygulamasoDocument30 pagesSPI Interface - HC595 UygulamasoseyfiPas encore d'évaluation
- Oracle Database 19c: Backup and Recovery: Activity Guide D106548GC10Document272 pagesOracle Database 19c: Backup and Recovery: Activity Guide D106548GC10tonygmnPas encore d'évaluation
- Advanced Computer Architecture: Presented By, Farhan MukhtiarDocument9 pagesAdvanced Computer Architecture: Presented By, Farhan MukhtiarFarhan Mukhtiar YousafzaiPas encore d'évaluation
- Advanced Computer Architecture: The Architecture of Parallel ComputersDocument44 pagesAdvanced Computer Architecture: The Architecture of Parallel ComputerssanthoshiharikaPas encore d'évaluation
- Advanced Computer Architecture: The Architecture of Parallel ComputersDocument44 pagesAdvanced Computer Architecture: The Architecture of Parallel ComputersKutty ShivaPas encore d'évaluation
- Implementation of DSP AlgorithmsDocument20 pagesImplementation of DSP Algorithmss tharunPas encore d'évaluation
- Distributed and Parallel Computing - Unit2Document92 pagesDistributed and Parallel Computing - Unit2Apoorva RajouraPas encore d'évaluation
- Advanced Computer Architecture ECE 6373: Pauline Markenscoff N320 Engineering Building 1 E-Mail: Markenscoff@uh - EduDocument151 pagesAdvanced Computer Architecture ECE 6373: Pauline Markenscoff N320 Engineering Building 1 E-Mail: Markenscoff@uh - Edurahilshah100Pas encore d'évaluation
- Module IIDocument60 pagesModule IIsheenaneesPas encore d'évaluation
- 26-27 SIMD ArchitectureDocument33 pages26-27 SIMD Architecturefanna786Pas encore d'évaluation
- L13 - Modern ProcessorsDocument19 pagesL13 - Modern Processorsدانه النوفليPas encore d'évaluation
- Module1 3-Ias Risc CiscDocument19 pagesModule1 3-Ias Risc CiscCharan ChowdaryPas encore d'évaluation
- BCSE412L - Parallel Computing 04Document9 pagesBCSE412L - Parallel Computing 04aavsgptPas encore d'évaluation
- BIL406 Chapter 2 Classifications of Parallel SystemsDocument67 pagesBIL406 Chapter 2 Classifications of Parallel SystemsMustafa SalihiPas encore d'évaluation
- The Zen Architecture Group 6 2Document14 pagesThe Zen Architecture Group 6 2Rheyster Vince Tan PulmanoPas encore d'évaluation
- Lecture 9-10 Computer Organization and ArchitectureDocument25 pagesLecture 9-10 Computer Organization and Architectureshashank kumarPas encore d'évaluation
- ES - Lecture 4 - Aug 4Document25 pagesES - Lecture 4 - Aug 4Abhishek KumarPas encore d'évaluation
- Unit 01 (2nd Part)Document50 pagesUnit 01 (2nd Part)Udbhav PachisiaPas encore d'évaluation
- Database Models and System ArchitectureDocument60 pagesDatabase Models and System Architectureujjwal subediPas encore d'évaluation
- CS0051 - Module 01 - Subtopic 1Document27 pagesCS0051 - Module 01 - Subtopic 1ronbayani2000Pas encore d'évaluation
- Computer Hardware: Ref: Chapter 3 - MIS by O'Brien, Marakas, & Behl, 9 EdDocument38 pagesComputer Hardware: Ref: Chapter 3 - MIS by O'Brien, Marakas, & Behl, 9 EdAratrika ChoudhuryPas encore d'évaluation
- 5 - Embedded SystemsDocument53 pages5 - Embedded Systemsحساب ويندوزPas encore d'évaluation
- Cloud Computing - Lecture 3Document22 pagesCloud Computing - Lecture 3Muhammad FahadPas encore d'évaluation
- Parallel Computing Unit 4 - PthreadsDocument51 pagesParallel Computing Unit 4 - PthreadsHarveen VelanPas encore d'évaluation
- TaxonomiesDocument15 pagesTaxonomiesBoris DJIONGOPas encore d'évaluation
- Parallel Processing Parallel ProcessingDocument64 pagesParallel Processing Parallel Processingpari638877Pas encore d'évaluation
- DiscoDocument22 pagesDiscosushmsnPas encore d'évaluation
- 04 HardwareDocument109 pages04 Hardwaresmitaasalunkhe1999Pas encore d'évaluation
- TRIPS - An EDGE Instruction Set Architecture: Chirag Shah April 24, 2008Document35 pagesTRIPS - An EDGE Instruction Set Architecture: Chirag Shah April 24, 2008Engr Ayaz KhanPas encore d'évaluation
- Core of Emb-SysDocument52 pagesCore of Emb-SysSushrut ZemsePas encore d'évaluation
- Chapter 8Document59 pagesChapter 8K S Sanath KashyapPas encore d'évaluation
- DSP ProcessorsDocument24 pagesDSP ProcessorsHerald Rufus100% (1)
- Socunit 1Document65 pagesSocunit 1Sooraj SattirajuPas encore d'évaluation
- 5.1. Unit V - DSP ProcessorDocument83 pages5.1. Unit V - DSP ProcessorJayaram ThamizhmaniPas encore d'évaluation
- 5.dsp UNIT 5 With 8XDocument69 pages5.dsp UNIT 5 With 8XpraveenPas encore d'évaluation
- Lecture5 - Memory - Management - PPTX Filename - UTF-8''Lecture5 - Memory ManagementDocument90 pagesLecture5 - Memory - Management - PPTX Filename - UTF-8''Lecture5 - Memory ManagementMariyam AshrafPas encore d'évaluation
- CS 213: Parallel Processing Architectures: Laxmi Narayan BhuyanDocument26 pagesCS 213: Parallel Processing Architectures: Laxmi Narayan BhuyanRammurtiRawatPas encore d'évaluation
- 1 - Microcontroller Vs MicroprocessorDocument19 pages1 - Microcontroller Vs MicroprocessorLong NguyenPas encore d'évaluation
- 2.1 Advanced Processor TechnologyDocument40 pages2.1 Advanced Processor Technologydhivya aPas encore d'évaluation
- Advanced Microcontroller: Department of Electronics and Telecommunication EngineeringDocument56 pagesAdvanced Microcontroller: Department of Electronics and Telecommunication EngineeringShreesh PartePas encore d'évaluation
- Multicore ProcessorDocument15 pagesMulticore ProcessorPhani KumarPas encore d'évaluation
- EE6304 Lecture13 ProcessorsDocument69 pagesEE6304 Lecture13 ProcessorsAshish SoniPas encore d'évaluation
- Digital Signal ProcessingDocument12 pagesDigital Signal ProcessingPrasannaKumar KaraNamPas encore d'évaluation
- Cs8083 Notes McapDocument187 pagesCs8083 Notes Mcapvkiruthiga390Pas encore d'évaluation
- Parallel Computing Platforms and Memory System Performance: John Mellor-CrummeyDocument43 pagesParallel Computing Platforms and Memory System Performance: John Mellor-CrummeyaskbilladdmicrosoftPas encore d'évaluation
- Week 10 2021Document42 pagesWeek 10 2021ngokfong yuPas encore d'évaluation
- Module 1Document67 pagesModule 1Mengie DanielPas encore d'évaluation
- GPU ArchitectureDocument28 pagesGPU Architecturesalution technologyPas encore d'évaluation
- Principles of Information Systems, Ninth Edition: Hardware: Input, Processing, and Output DevicesDocument34 pagesPrinciples of Information Systems, Ninth Edition: Hardware: Input, Processing, and Output DevicesですモッケPas encore d'évaluation
- CISC V RISCDocument10 pagesCISC V RISCLeena VsPas encore d'évaluation
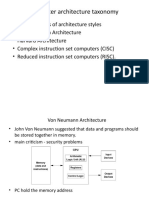
- Computer Architecture TaxonomyDocument13 pagesComputer Architecture TaxonomySuresh VaruvelPas encore d'évaluation
- Embedded Systems Programming: Prof. Dr. Hassan AlansaryDocument20 pagesEmbedded Systems Programming: Prof. Dr. Hassan AlansaryAbdallah AdelPas encore d'évaluation
- Ct5054ni WK05 L 93481Document41 pagesCt5054ni WK05 L 93481gautamdipendra968Pas encore d'évaluation
- Unit-1 (Module-1) : Introduction To MicrocontrollerDocument20 pagesUnit-1 (Module-1) : Introduction To MicrocontrollerRajendra PatelPas encore d'évaluation
- Parallal Architecture SDocument17 pagesParallal Architecture Selsa annaPas encore d'évaluation
- System Programming - II ThreadsDocument46 pagesSystem Programming - II ThreadsAbdul Samad KhanPas encore d'évaluation
- Cse 216 - L14Document37 pagesCse 216 - L14Gojo SatoruPas encore d'évaluation
- DSP ProcessorsDocument114 pagesDSP ProcessorsArunPas encore d'évaluation
- Parallel Arch 2Document9 pagesParallel Arch 2manishbhardwaj8131Pas encore d'évaluation
- CH 2 Vector ProcessingDocument16 pagesCH 2 Vector Processingdigvijay dholePas encore d'évaluation
- Core of The Embedded SystemDocument107 pagesCore of The Embedded SystemSanskrithi TigerPas encore d'évaluation
- 4.2 Fuzzy - SetsDocument39 pages4.2 Fuzzy - SetsLekshmiPas encore d'évaluation
- Machine Learning Using Neural Networks: Presentation By: C. Vinoth Kumar SSN College of EngineeringDocument24 pagesMachine Learning Using Neural Networks: Presentation By: C. Vinoth Kumar SSN College of EngineeringLekshmiPas encore d'évaluation
- Supervised Learning Neural NetworksDocument34 pagesSupervised Learning Neural NetworksLekshmiPas encore d'évaluation
- L 9 Unsupervised Learning Network PDFDocument13 pagesL 9 Unsupervised Learning Network PDFLekshmiPas encore d'évaluation
- Artificial Neural Network: Presentation By: C. Vinoth Kumar SSN College of EngineeringDocument9 pagesArtificial Neural Network: Presentation By: C. Vinoth Kumar SSN College of EngineeringLekshmiPas encore d'évaluation
- Genetic Algorithms - Knapsack Problem - Knapsack ProblemDocument28 pagesGenetic Algorithms - Knapsack Problem - Knapsack ProblemLekshmiPas encore d'évaluation
- Derivative Free Optimization Simulated Annealing: Presentation By: C. Vinoth Kumar SSN College of EngineeringDocument16 pagesDerivative Free Optimization Simulated Annealing: Presentation By: C. Vinoth Kumar SSN College of EngineeringLekshmiPas encore d'évaluation
- Adaptive Networks: Presentation By: C. Vinoth Kumar SSN College of EngineeringDocument19 pagesAdaptive Networks: Presentation By: C. Vinoth Kumar SSN College of EngineeringLekshmiPas encore d'évaluation
- Genetic Algorithm 2Document41 pagesGenetic Algorithm 2LekshmiPas encore d'évaluation
- Derivative Free Optimization Genetic Algorithm 1Document21 pagesDerivative Free Optimization Genetic Algorithm 1LekshmiPas encore d'évaluation
- Brochure Machine Learning in Intelligent Image ProcessingDocument2 pagesBrochure Machine Learning in Intelligent Image ProcessingLekshmiPas encore d'évaluation
- Introduction To Machine Learning: Workshop On Machine Learning For Intelligent Image ProcessingDocument44 pagesIntroduction To Machine Learning: Workshop On Machine Learning For Intelligent Image ProcessingLekshmiPas encore d'évaluation
- Soft Computing: Presentation By: C. Vinoth Kumar SSN College of EngineeringDocument17 pagesSoft Computing: Presentation By: C. Vinoth Kumar SSN College of EngineeringLekshmiPas encore d'évaluation
- Machine Learning: Presentation By: C. Vinoth Kumar SSN College of EngineeringDocument15 pagesMachine Learning: Presentation By: C. Vinoth Kumar SSN College of EngineeringLekshmi100% (1)
- DR C AravindanDocument140 pagesDR C AravindanLekshmiPas encore d'évaluation
- Introduction To Soft Computing: Presentation By: C. Vinoth Kumar SSN College of EngineeringDocument21 pagesIntroduction To Soft Computing: Presentation By: C. Vinoth Kumar SSN College of EngineeringLekshmiPas encore d'évaluation
- Retinal Blood Vessel Segmentation and Measurement of Vessel DiametersDocument6 pagesRetinal Blood Vessel Segmentation and Measurement of Vessel DiametersLekshmiPas encore d'évaluation
- Stochastic Model For Cancer Cell Growth With Spontaneous Mutation and ProliferationDocument11 pagesStochastic Model For Cancer Cell Growth With Spontaneous Mutation and ProliferationLekshmiPas encore d'évaluation
- Fortigate 7000 60 PDFDocument116 pagesFortigate 7000 60 PDFSuryo AjiePas encore d'évaluation
- C Parallel Port (Compatibility Mode) PDFDocument32 pagesC Parallel Port (Compatibility Mode) PDFDanyal ZahidPas encore d'évaluation
- Full Forms List of Computer Parts AbbreviationsDocument5 pagesFull Forms List of Computer Parts AbbreviationsSumit KumarPas encore d'évaluation
- A18640 Att Mexico Bcs Rs Mop Upgrade Ncs540 v1.3 20220927Document48 pagesA18640 Att Mexico Bcs Rs Mop Upgrade Ncs540 v1.3 20220927Dan Emmanuel Casarrubias VillaPas encore d'évaluation
- AxesPlus Datasheet Architecture enDocument2 pagesAxesPlus Datasheet Architecture enFook YapPas encore d'évaluation
- Arduino Plugin For Visual Studio 2008 and 2010Document3 pagesArduino Plugin For Visual Studio 2008 and 2010A.MakerPas encore d'évaluation
- Manual - POS - Printer SDK For Android API Reference Guide - English - Rev - 1 - 07 PDFDocument172 pagesManual - POS - Printer SDK For Android API Reference Guide - English - Rev - 1 - 07 PDFTwinsnet HospotPas encore d'évaluation
- Computer System Architecture Lab Report 3Document7 pagesComputer System Architecture Lab Report 3290 874Sheikh hasanPas encore d'évaluation
- Oracle HRMS Self Service SetupDocument6 pagesOracle HRMS Self Service SetupDhinakaran DartPas encore d'évaluation
- Useful FirewallD Rules To Configure and Manage Firewall in LinuxDocument10 pagesUseful FirewallD Rules To Configure and Manage Firewall in Linuxdanxl007Pas encore d'évaluation
- KES Application ManagementDocument16 pagesKES Application ManagementSol GPas encore d'évaluation
- 2 NdmicroDocument20 pages2 Ndmicroaklilu YebuzeyePas encore d'évaluation
- I.mx Yocto Project User's Guide LinuxDocument20 pagesI.mx Yocto Project User's Guide Linuxparvathie santhoshPas encore d'évaluation
- NXD 8.0 English ManualDocument36 pagesNXD 8.0 English ManualFrancis Mark Bugayong33% (3)
- Chapter 3 ProcessDocument42 pagesChapter 3 ProcessSanjeev RPas encore d'évaluation
- CISCO CCNA VLAN TestDocument4 pagesCISCO CCNA VLAN TestMichael OyiboPas encore d'évaluation
- Systemd Cheat Sheet: List All Available ServicesDocument2 pagesSystemd Cheat Sheet: List All Available ServicesRonaldMartinezPas encore d'évaluation
- RiscDocument1 pageRiscSreekrishna DasPas encore d'évaluation
- TO Computers: Lesson 1: Understanding The Computer SystemDocument34 pagesTO Computers: Lesson 1: Understanding The Computer SystemWilfPas encore d'évaluation
- Infoblox CLI Guide: NIOS 6.1 For Infoblox Network Core Services AppliancesDocument118 pagesInfoblox CLI Guide: NIOS 6.1 For Infoblox Network Core Services AppliancesPriyanto UkiPas encore d'évaluation
- Brochure - Nomad - BrochureDocument2 pagesBrochure - Nomad - Brochurerugged_mikePas encore d'évaluation
- Change Notification: Release DateDocument11 pagesChange Notification: Release DateimmortalPas encore d'évaluation
- Digital Logic Design Lec04Document32 pagesDigital Logic Design Lec04mobeenPas encore d'évaluation
- PIR Sensor Using Patients IdentificationDocument20 pagesPIR Sensor Using Patients IdentificationsaravananPas encore d'évaluation
- What Is 802.11?: 802.11 Networks For Dummies ProfessorsDocument4 pagesWhat Is 802.11?: 802.11 Networks For Dummies ProfessorsCORAL ALONSO JIMÉNEZPas encore d'évaluation
- DB2 PS SAP TRBK External Benchmark Report-V1.3.2Document168 pagesDB2 PS SAP TRBK External Benchmark Report-V1.3.2Gerardo CastroPas encore d'évaluation
- JstackDocument62 pagesJstackabdulbasith786Pas encore d'évaluation