Vous aimerez peut-être aussi
- Excitation SystemDocument38 pagesExcitation SystemRaja Ramachandran100% (1)
- Excitation System of Synchronous GeneratorDocument7 pagesExcitation System of Synchronous GeneratorMOHSIN_IIUIPas encore d'évaluation
- Reactive Power ControlDocument25 pagesReactive Power ControlDeepti GuptaPas encore d'évaluation
- Generation of High Direct Current VoltagesDocument68 pagesGeneration of High Direct Current VoltagesMaria JoseePas encore d'évaluation
- TripDocument6 pagesTripbobyPas encore d'évaluation
- Load Frequency ControlDocument4 pagesLoad Frequency Controlkumarchaturvedula100% (1)
- Chapter 11 Control of Active Power and Reactive PowerDocument116 pagesChapter 11 Control of Active Power and Reactive PowerNguyễn Anh Tú100% (1)
- Power OscillationsDocument54 pagesPower OscillationsVijay RohillaPas encore d'évaluation
- Modelling and Load Frequency Control L12Document27 pagesModelling and Load Frequency Control L12Rajat RaiPas encore d'évaluation
- Synchronous Motor Drives - LCIDocument15 pagesSynchronous Motor Drives - LCIJoyson PereiraPas encore d'évaluation
- SojitsDocument12 pagesSojitskavish malakaPas encore d'évaluation
- 12 - 0274 - 1875kVA - 6.6kV - Data Sheet-Enquiry PDFDocument2 pages12 - 0274 - 1875kVA - 6.6kV - Data Sheet-Enquiry PDFpurushyanPas encore d'évaluation
- Frequency Stabilization in TransmissionDocument9 pagesFrequency Stabilization in Transmissionsf111Pas encore d'évaluation
- Tutorial On Load Frequency ControlDocument2 pagesTutorial On Load Frequency ControlNitishPaudel100% (2)
- TechRef StationControllerDocument28 pagesTechRef StationControllerАлишер ГалиевPas encore d'évaluation
- Mvar Cap CurveDocument17 pagesMvar Cap Curvemshireeshareddy100% (1)
- Fast Bus Transfer Systems: A System Solution Approach: Aartech Solonics LTD., Bhopal, IndiaDocument38 pagesFast Bus Transfer Systems: A System Solution Approach: Aartech Solonics LTD., Bhopal, IndiaDurga PrasadPas encore d'évaluation
- Development of Grid Code For Wind Power Generation in India PowerpointDocument37 pagesDevelopment of Grid Code For Wind Power Generation in India PowerpointgopiPas encore d'évaluation
- POWER SYSTEMS - 1 - QuestionsDocument7 pagesPOWER SYSTEMS - 1 - QuestionsB.Neelakanteshwar RaoPas encore d'évaluation
- Protection of GeneratorDocument60 pagesProtection of GeneratorIsradani MjPas encore d'évaluation
- Generator Excitation SystemDocument16 pagesGenerator Excitation SystemRuban Kumar100% (1)
- Salient Features of Generators Stage-1Document12 pagesSalient Features of Generators Stage-1raghavendran raghu100% (1)
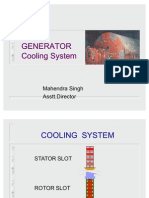
- Awantha Power - Generator Cooling SystemDocument54 pagesAwantha Power - Generator Cooling SystemParvin KumarPas encore d'évaluation
- 415 V System Stage-1Document18 pages415 V System Stage-1raghavendran raghuPas encore d'évaluation
- Excitation System and PSSDocument27 pagesExcitation System and PSSNitin Singh50% (2)
- Synchronous Generator Capability Limitt: 1.MVA or Armature Current Limit of GeneratorDocument2 pagesSynchronous Generator Capability Limitt: 1.MVA or Armature Current Limit of GeneratorPraveen KumarPas encore d'évaluation
- Training Module BHELDocument97 pagesTraining Module BHELMouryaChakradharNageshPas encore d'évaluation
- Mva, Mvar & MW ??Document48 pagesMva, Mvar & MW ??Punit MandeliaPas encore d'évaluation
- Generator Excitation SystemDocument35 pagesGenerator Excitation SystemNitin Sakpal100% (1)
- Restoration of System After BlackoutDocument12 pagesRestoration of System After BlackoutPradip Goswami100% (3)
- Generator Capability Curve Constraint For PSO Based Optimal Power FlowDocument6 pagesGenerator Capability Curve Constraint For PSO Based Optimal Power FlowAvinash PathakPas encore d'évaluation
- Economic Operation of Power SystemDocument45 pagesEconomic Operation of Power SystemDogbey BrightPas encore d'évaluation
- Automatic Voltage Regulator For Synchronous GeneratorDocument7 pagesAutomatic Voltage Regulator For Synchronous GeneratorGnanaseharan ArunachalamPas encore d'évaluation
- 5 Excitation ModelDocument18 pages5 Excitation Modelwoldemariam workuPas encore d'évaluation
- Mvar PDFDocument48 pagesMvar PDFishwer kushwahPas encore d'évaluation
- Tans11 15Document5 pagesTans11 15Sudhir SainiPas encore d'évaluation
- Motor Starting AnalysisDocument5 pagesMotor Starting Analysisjeevan kachare100% (2)
- Types of Substations, Main Components, and Its Major Functions-R0Document0 pageTypes of Substations, Main Components, and Its Major Functions-R0williamb285Pas encore d'évaluation
- Synchronous GeneratorDocument2 pagesSynchronous GeneratorBrandon LowePas encore d'évaluation
- Kestrel Chapter 6 - Power System StabilizersDocument10 pagesKestrel Chapter 6 - Power System StabilizerssulemankhalidPas encore d'évaluation
- Understanding Off Nominal Tap RatioDocument9 pagesUnderstanding Off Nominal Tap RatioShyamkant VasekarPas encore d'évaluation
- Generator Protection Unit#3 KMPCLDocument15 pagesGenerator Protection Unit#3 KMPCLAmaresh NayakPas encore d'évaluation
- Siemens - Applications For SIPROTEC Protection RelaysDocument228 pagesSiemens - Applications For SIPROTEC Protection RelaysFabien Massenet100% (2)
- Applying Power System Stabilizers Part III - Practical Considerations PDFDocument13 pagesApplying Power System Stabilizers Part III - Practical Considerations PDFAshwani GargPas encore d'évaluation
- SFC OperationDocument10 pagesSFC OperationKelvin LiewPas encore d'évaluation
- Unit Commitment Part I: by M Usman AsadDocument46 pagesUnit Commitment Part I: by M Usman Asadali virkPas encore d'évaluation
- Power System AnalysisDocument32 pagesPower System Analysissandeep bojjaPas encore d'évaluation
- TransformersDocument75 pagesTransformerssamiularefin2000Pas encore d'évaluation
- PPT Static Shunt Compensation (Benny Yeung)Document39 pagesPPT Static Shunt Compensation (Benny Yeung)Chetan Kotwal100% (1)
- Perf 21-22 SH Class5 SecBDocument18 pagesPerf 21-22 SH Class5 SecBdark gamerPas encore d'évaluation
- PE351 Lect2 2020Document19 pagesPE351 Lect2 2020Abdul RazzaqPas encore d'évaluation
- Voltage StabilityDocument64 pagesVoltage StabilityPradip KhatriPas encore d'évaluation
- EE 315 Power Distribution and Utilization: Lecture2: Electricity BasicsDocument19 pagesEE 315 Power Distribution and Utilization: Lecture2: Electricity Basicsusama khalidPas encore d'évaluation
- Alternating CurrentDocument51 pagesAlternating CurrentBalaji PeddakamPas encore d'évaluation
- ELE8331 Power System Control Dr. Nuraddeen MagajiDocument25 pagesELE8331 Power System Control Dr. Nuraddeen MagajiumarsaboPas encore d'évaluation
- FACTSDocument27 pagesFACTSvenugopal dugyalaPas encore d'évaluation
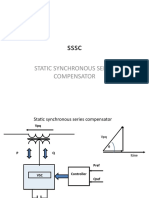
- Static Synchronous Series CompensatorDocument19 pagesStatic Synchronous Series CompensatorPravin NagralePas encore d'évaluation
- Formula SheetDocument5 pagesFormula SheetnoorPas encore d'évaluation
- Chapter 3 - Simple Resistive CircuitsDocument32 pagesChapter 3 - Simple Resistive CircuitsDaniaPas encore d'évaluation
- Curva A-C Pumps 8100 A-8771Document1 pageCurva A-C Pumps 8100 A-8771Christian FernandezPas encore d'évaluation
- FP1.0 Engineering Data A-C Pumps 8100Document12 pagesFP1.0 Engineering Data A-C Pumps 8100Christian FernandezPas encore d'évaluation
- Cheves 1 Hydropower Plant: Regulation StabilityDocument7 pagesCheves 1 Hydropower Plant: Regulation StabilityChristian FernandezPas encore d'évaluation
- WW All Spare-Parts English 2013-V7Document60 pagesWW All Spare-Parts English 2013-V7Christian FernandezPas encore d'évaluation
- 02 Vesda Tech Tip VLS Firmware Upgrade Lores PDFDocument2 pages02 Vesda Tech Tip VLS Firmware Upgrade Lores PDFChristian FernandezPas encore d'évaluation
- 06 VESDA Accessories Guide A4 IE LoresDocument34 pages06 VESDA Accessories Guide A4 IE LoresChristian FernandezPas encore d'évaluation
- 03 Design Guide Rail CarsDocument23 pages03 Design Guide Rail CarsChristian FernandezPas encore d'évaluation
- 01 VESDA HLI Access Protocol VHX-0320 A4 TDS LoresDocument2 pages01 VESDA HLI Access Protocol VHX-0320 A4 TDS LoresChristian FernandezPas encore d'évaluation
- VHX 1420 Hfs PDFDocument2 pagesVHX 1420 Hfs PDFCarlos Eberhard Diaz Torres100% (1)
- Fenwal Temp.Document2 pagesFenwal Temp.Christian FernandezPas encore d'évaluation
- NEC Code For Size of Cable For MotorDocument3 pagesNEC Code For Size of Cable For MotorraoPas encore d'évaluation
- 3-Ph Converter Fed DC MotorDocument11 pages3-Ph Converter Fed DC MotorSrinivas GudePas encore d'évaluation
- 524216289Document451 pages524216289SARAMQRPas encore d'évaluation
- Lab 2 - Earth Leakage Relay Test (Lab 2) BEF 45101Document8 pagesLab 2 - Earth Leakage Relay Test (Lab 2) BEF 45101Anna Ri100% (2)
- VLSI I - V CharacteristicsDocument46 pagesVLSI I - V CharacteristicsMALATHI .LPas encore d'évaluation
- Section 2 - Substation SwitchgearDocument6 pagesSection 2 - Substation SwitchgearBabar SaleemPas encore d'évaluation
- GEK - 91689 (2) GabineteDocument64 pagesGEK - 91689 (2) Gabinetemauricio suarezPas encore d'évaluation
- Certificate of Compliance: Tai PhamDocument5 pagesCertificate of Compliance: Tai Phamesteban moncayo100% (1)
- Cybex Wiring DiagramDocument1 pageCybex Wiring DiagramkatilicousPas encore d'évaluation
- ĐINH PHÚ 0337999937: 23. Electric SystemDocument39 pagesĐINH PHÚ 0337999937: 23. Electric SystemQuốc Phú ĐinhPas encore d'évaluation
- NotesDocument176 pagesNoteskalyanPas encore d'évaluation
- U2043Document5 pagesU2043Tito David ParedesPas encore d'évaluation
- PQ1CY1032Z: TO-263 Surface Mount Type Chopper RegulatorDocument9 pagesPQ1CY1032Z: TO-263 Surface Mount Type Chopper RegulatorJm'kosongtujuh RudiPas encore d'évaluation
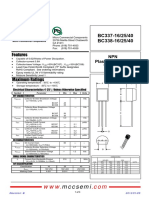
- BC337 338 (To 92)Document3 pagesBC337 338 (To 92)MedoBoudyPas encore d'évaluation
- Week 11 - Fundamentals of Distribution SystemsDocument39 pagesWeek 11 - Fundamentals of Distribution SystemsEstika Vriscilla GintingPas encore d'évaluation
- HandOut CH2Document21 pagesHandOut CH2Bullo Mohammed89% (9)
- Half Wave & Full Wave RectifiersDocument19 pagesHalf Wave & Full Wave RectifiersRNKPas encore d'évaluation
- Lighting Technical GuideDocument116 pagesLighting Technical Guidelam266Pas encore d'évaluation
- Icp Electric Tooth Clutch M Series Etcm: DesignDocument4 pagesIcp Electric Tooth Clutch M Series Etcm: DesignsandraPas encore d'évaluation
- Charge Pump Converter ICsDocument5 pagesCharge Pump Converter ICsMbatowoPas encore d'évaluation
- Utility and Substation Testing AGDocument8 pagesUtility and Substation Testing AGgusPas encore d'évaluation
- MODULE 4 Extra Low Voltage SystemsDocument19 pagesMODULE 4 Extra Low Voltage SystemsVismithaPas encore d'évaluation
- Brochure Bushing 2016 English 1 PDFDocument2 pagesBrochure Bushing 2016 English 1 PDFSSDPas encore d'évaluation
- Ed2 Assignment - 7segmentDocument7 pagesEd2 Assignment - 7segmentdinPas encore d'évaluation
- Exercises ElectromagnetDocument6 pagesExercises ElectromagnetSyahida SyasyaPas encore d'évaluation
- An Overview of Short Circuit Current (Part 3) : Sample Calculation For Small LT SystemDocument6 pagesAn Overview of Short Circuit Current (Part 3) : Sample Calculation For Small LT SystemAlemayehu Worku ZikargeaPas encore d'évaluation
- Oru Oman DataDocument1 pageOru Oman DataVishnu SudarsananPas encore d'évaluation
- Power PV ParametersDocument2 pagesPower PV ParametersMarwa EltouhamyPas encore d'évaluation
- 5000 Watt BLDC Electric Motor Heavy Duty BLDC MotorDocument3 pages5000 Watt BLDC Electric Motor Heavy Duty BLDC MotorabhayuietPas encore d'évaluation