Vous aimerez peut-être aussi
- Practica 9 Control IndustrialDocument1 pagePractica 9 Control IndustrialSebastian TrujilloPas encore d'évaluation
- CUESTIONARIO 2mDocument11 pagesCUESTIONARIO 2mCesar TV100% (1)
- Tarea Con PLC S7 1200 - Arranque Directo 1Document12 pagesTarea Con PLC S7 1200 - Arranque Directo 1Ken SVPas encore d'évaluation
- PLC Logo InformeDocument7 pagesPLC Logo InformeraulPas encore d'évaluation
- Informe N°5 Arranque Y-DeltaDocument4 pagesInforme N°5 Arranque Y-DeltaMauricio Alexander NiñoPas encore d'évaluation
- DISEÑO DE MANDOS ELÉCTRICOS CON CADE SIMUDocument7 pagesDISEÑO DE MANDOS ELÉCTRICOS CON CADE SIMUFrancisco Zuñiga100% (1)
- Arranque motor inducciónDocument12 pagesArranque motor inducciónCharles HillPas encore d'évaluation
- Circuito básico marcha-paroDocument3 pagesCircuito básico marcha-paroJON GARMENDIAPas encore d'évaluation
- Arranque Directo Motro 1fDocument16 pagesArranque Directo Motro 1fVictor Manuel CanahuiriPas encore d'évaluation
- Practica 4 PLC-Arranque en Cascada de 3 MotoresDocument7 pagesPractica 4 PLC-Arranque en Cascada de 3 MotoresKevin Alejandro0% (1)
- Informe Reles de TiempoDocument3 pagesInforme Reles de TiempoDanilo PuninaPas encore d'évaluation
- Triac Informe N°3Document9 pagesTriac Informe N°3Alberto HinojosaPas encore d'évaluation
- Practica #6 Arranque Estrella-TrianguloDocument4 pagesPractica #6 Arranque Estrella-TrianguloEddy100% (1)
- Dinamica de Las Maquinas ElectricasDocument7 pagesDinamica de Las Maquinas Electricasjuanelo1988Pas encore d'évaluation
- Fundamentos de controles eléctricos: contactores, relevadores, temporizadoresDocument15 pagesFundamentos de controles eléctricos: contactores, relevadores, temporizadoresDaniel CamarilloPas encore d'évaluation
- Simbología, características y funcionamiento de SCS, DIAC y TRIACDocument2 pagesSimbología, características y funcionamiento de SCS, DIAC y TRIACStand JonsonPas encore d'évaluation
- Practicas de Automatismo de Logica CableadaDocument20 pagesPracticas de Automatismo de Logica CableadaVictorS100% (1)
- Informe Nº6 Laboratorio de Máquinas Eléctricas - Arranque Estrella Triángulo de Un Motor de Inducción TrifásicoDocument14 pagesInforme Nº6 Laboratorio de Máquinas Eléctricas - Arranque Estrella Triángulo de Un Motor de Inducción TrifásicoDylan MarquinaPas encore d'évaluation
- s14 - Logica TTL y CmosDocument26 pagess14 - Logica TTL y CmosJHORDAM MAXWELL GOMEZ TORRES100% (1)
- TemperaturaDocument36 pagesTemperaturaEnderson IbarraPas encore d'évaluation
- PLC y Logica CableadaDocument3 pagesPLC y Logica CableadaDanilo Alfonso Rojas MendezPas encore d'évaluation
- Historia de La Electrónica de PotenciaDocument3 pagesHistoria de La Electrónica de PotenciaLudwig Beethoven100% (2)
- Eeid - Eeid-510 - Formatoalumnotrabajofinal de ElectronicaDocument9 pagesEeid - Eeid-510 - Formatoalumnotrabajofinal de ElectronicaJean carlos OregonPas encore d'évaluation
- Control Todo o NadaDocument3 pagesControl Todo o NadaDaniel ZapateiroPas encore d'évaluation
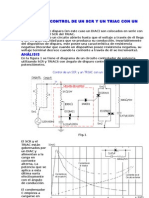
- Circuito de Control de Un SCR y Un Triac Con Un DiaccDocument3 pagesCircuito de Control de Un SCR y Un Triac Con Un DiaccJ̶ S̶t̶i̶c̶k̶ ̶h̶e̶r̶r̶e̶r̶a̶ ̶m̶a̶n̶r̶i̶q̶u̶e̶Pas encore d'évaluation
- Mandos Básicos de Un ContactorDocument4 pagesMandos Básicos de Un Contactornegritillomar67% (3)
- Trabajo Preparatorio N°7Document3 pagesTrabajo Preparatorio N°7Danilo Punina0% (1)
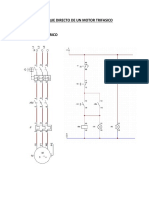
- Práctica N°9 ESQUEMA ARRANQUE DIRECTO MOTOR TRIFASICODocument2 pagesPráctica N°9 ESQUEMA ARRANQUE DIRECTO MOTOR TRIFASICOJulio Pino MirandaPas encore d'évaluation
- Dimmer InformeDocument9 pagesDimmer InformeMary Alarcon Palomino100% (1)
- Informe Sobre Relay y ContactoresDocument9 pagesInforme Sobre Relay y ContactoresJosue OrdoñezPas encore d'évaluation
- Tarea 11 - Programacion Basica de Microcontroladores PLC-2Document26 pagesTarea 11 - Programacion Basica de Microcontroladores PLC-2Samuel D Los Rios100% (1)
- Informe Conversor Ac Dc-SemicontroladoDocument18 pagesInforme Conversor Ac Dc-SemicontroladoOscar Mayorga50% (2)
- Reporte de Practica No. 7 - Arranque Por Autotransformador de Un Motor de Inducción 3Document14 pagesReporte de Practica No. 7 - Arranque Por Autotransformador de Un Motor de Inducción 3Ernesto Sotelo GarciaPas encore d'évaluation
- Problemas Propuestos de Control IndustrialDocument21 pagesProblemas Propuestos de Control IndustrialStalin Tonato0% (2)
- Arrancador monofásico SCRDocument5 pagesArrancador monofásico SCRRafael Ramirez100% (1)
- Funcionamiento del relevo como interruptor controladorDocument2 pagesFuncionamiento del relevo como interruptor controladorAndrés NogueraPas encore d'évaluation
- Conclusiones IskraDocument5 pagesConclusiones IskraEdyCruzPas encore d'évaluation
- Variador de frecuencia ABB ACS300 - Informe de prácticasDocument6 pagesVariador de frecuencia ABB ACS300 - Informe de prácticasGiovanna Sandoval IriartePas encore d'évaluation
- Práctica 9 - Variadores de VelocidadDocument8 pagesPráctica 9 - Variadores de VelocidadAnonymous fdPbxTWIPas encore d'évaluation
- Control IndustrialDocument1 pageControl IndustrialFranklin DaniloPas encore d'évaluation
- Informde Temporizadores y Contadores Spteo 7Document5 pagesInformde Temporizadores y Contadores Spteo 7Christian CarriónPas encore d'évaluation
- Cartilla de ejercicios-AUTOMATION - STUDIO PDFDocument5 pagesCartilla de ejercicios-AUTOMATION - STUDIO PDFNathanielChoqueLizarazu100% (1)
- Uub Estaciones en Cade SimuDocument134 pagesUub Estaciones en Cade SimuLuis AlcantaraPas encore d'évaluation
- Salida Colector o Drenador AbiertoDocument5 pagesSalida Colector o Drenador AbiertoCarlos Ortega100% (1)
- Secuencia ForzadaDocument19 pagesSecuencia ForzadaJesus Joel Gaspar Vasquez100% (1)
- Proyecto Final Electrónica de PotenciaDocument3 pagesProyecto Final Electrónica de PotenciaJose Miguel Chacón100% (1)
- Práctica 12 Control IndustrialDocument1 pagePráctica 12 Control IndustrialVictor ColderPas encore d'évaluation
- Simbología IEC-NEMA de Dispositivos para PLCDocument8 pagesSimbología IEC-NEMA de Dispositivos para PLCjorhrod100% (1)
- Tiristores y transistores: Reconocimiento y pruebasDocument17 pagesTiristores y transistores: Reconocimiento y pruebasGherson D. Toro MelendrezPas encore d'évaluation
- Aplicaciones de Los Variadores de Velocidad.Document12 pagesAplicaciones de Los Variadores de Velocidad.Jordy Obregon100% (2)
- Informe Oscilador Con SCR y Optoacoplador PrunaDocument8 pagesInforme Oscilador Con SCR y Optoacoplador PrunaJazz PrunaPas encore d'évaluation
- Generador trifásico circuito sincronizaciónDocument7 pagesGenerador trifásico circuito sincronizaciónLAFUENTE TITO LEONELPas encore d'évaluation
- Motor TrifasicoDocument6 pagesMotor TrifasicoJOELPas encore d'évaluation
- Diseño y Construcción de Un Arrancador Suave Aplicado A Un Motor de Inducción TrifásicoDocument15 pagesDiseño y Construcción de Un Arrancador Suave Aplicado A Un Motor de Inducción Trifásicogiovanny enrique altamarPas encore d'évaluation
- Maquinas Electricas Informe 10Document15 pagesMaquinas Electricas Informe 10prohpePas encore d'évaluation
- SCELEDocument63 pagesSCELEignaciobujanvillarPas encore d'évaluation
- Motores TrifásicosDocument10 pagesMotores TrifásicosJxsé OG 420Pas encore d'évaluation
- Clasificación de Las Maquinas Rotativas de Corriente AlternaDocument7 pagesClasificación de Las Maquinas Rotativas de Corriente AlternaAlberto Ordóñez MañasPas encore d'évaluation
- Taller Cuestionario de Motores Trifasicos y Placa de Caracteristicas - J.D LeónDocument11 pagesTaller Cuestionario de Motores Trifasicos y Placa de Caracteristicas - J.D LeónMelissa Gallego NarvaezPas encore d'évaluation
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209D'EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Évaluation : 1 sur 5 étoiles1/5 (2)
- ControlabilidadDocument3 pagesControlabilidadKevin AlejandroPas encore d'évaluation
- CodificacionDocument4 pagesCodificacionKevin AlejandroPas encore d'évaluation
- Mapa TermodinamicaDocument1 pageMapa TermodinamicaKevin AlejandroPas encore d'évaluation
- ELEctricidad y MagnetismoDocument10 pagesELEctricidad y MagnetismoKevin AlejandroPas encore d'évaluation
- Microcontroladores Primer ProgramaDocument2 pagesMicrocontroladores Primer ProgramaKevin AlejandroPas encore d'évaluation
- Resumen LibroDocument2 pagesResumen LibroKevin AlejandroPas encore d'évaluation
- Definición y criterios de observabilidadDocument3 pagesDefinición y criterios de observabilidadKevin AlejandroPas encore d'évaluation
- OTRASLEYESPRACTICAXDocument1 pageOTRASLEYESPRACTICAXKevin AlejandroPas encore d'évaluation
- Resumen LibroDocument1 pageResumen LibroKevin AlejandroPas encore d'évaluation
- Capitulo 9Document1 pageCapitulo 9Kevin AlejandroPas encore d'évaluation
- Capitulo 6Document1 pageCapitulo 6Kevin AlejandroPas encore d'évaluation
- Resumen LibroDocument1 pageResumen LibroKevin AlejandroPas encore d'évaluation
- Resumen LibroDocument1 pageResumen LibroKevin AlejandroPas encore d'évaluation
- Capitulo 9Document1 pageCapitulo 9Kevin AlejandroPas encore d'évaluation
- Resumen LibroDocument1 pageResumen LibroKevin AlejandroPas encore d'évaluation
- Codigo GrayDocument8 pagesCodigo GrayKevin AlejandroPas encore d'évaluation
- Practica 4 PLC-Arranque en Cascada de 3 MotoresDocument7 pagesPractica 4 PLC-Arranque en Cascada de 3 MotoresKevin Alejandro0% (1)
- Globalización impacto económicoDocument4 pagesGlobalización impacto económicoKevin AlejandroPas encore d'évaluation
- Practica 4 PLC-Arranque en Cascada de 3 MotoresDocument7 pagesPractica 4 PLC-Arranque en Cascada de 3 MotoresKevin Alejandro0% (1)
- Practica 3 PLC-Inversion de Giro de MotorDocument10 pagesPractica 3 PLC-Inversion de Giro de MotorKevin Alejandro0% (1)
- Practica 3 PLC-Inversion de Giro de MotorDocument10 pagesPractica 3 PLC-Inversion de Giro de MotorKevin Alejandro0% (1)
- Problema Ley de CoulombDocument5 pagesProblema Ley de CoulombKevin Alejandro100% (1)
- Motor Diésel DoosanDocument74 pagesMotor Diésel DoosanJose Luis Lavin100% (1)
- PresentaciónDocument31 pagesPresentaciónLuna UrrutiaPas encore d'évaluation
- Manual de compresores QT y QTSDocument45 pagesManual de compresores QT y QTSGUADALUPE GARRIDO LUCASPas encore d'évaluation
- EPLAN Print Job PDFDocument1 pageEPLAN Print Job PDFEdwin RamirezPas encore d'évaluation
- Manual Caldera Caldaia Maxx 40 CondensacionDocument28 pagesManual Caldera Caldaia Maxx 40 CondensacionHernán OrozcoPas encore d'évaluation
- Programa DieselDocument24 pagesPrograma DieselSergio PerlazaPas encore d'évaluation
- Catálogo motor Perkins 6PA305Document48 pagesCatálogo motor Perkins 6PA305Cristian Meinl100% (3)
- Catalogo Lar Espanhol WebDocument33 pagesCatalogo Lar Espanhol Webpedro.molinaPas encore d'évaluation
- Tractores Agricola-Manual Tecnico de ManejoDocument94 pagesTractores Agricola-Manual Tecnico de ManejoRussel Santos ArcayoPas encore d'évaluation
- RoboshotDocument4 pagesRoboshotAndresPoncePas encore d'évaluation
- Ajuste de Motor DieselDocument84 pagesAjuste de Motor DieselOscar Estrada67% (3)
- Cuadro Comparativo PreciosDocument11 pagesCuadro Comparativo PreciosCarolina DucuaraPas encore d'évaluation
- Ejercicios PoleasDocument8 pagesEjercicios PoleasGabriel Pachas AlvaradoPas encore d'évaluation
- Cajas de Cambio AutomáticasDocument34 pagesCajas de Cambio AutomáticasLIBRAIRON2Pas encore d'évaluation
- BMW E46 m3 SSG MF ManualDocument64 pagesBMW E46 m3 SSG MF ManualFlorian Leordeanu67% (6)
- 8444b810a DPCDocument2 pages8444b810a DPCrafael pariona astoPas encore d'évaluation
- Prensas mecánicas e hidráulicasDocument8 pagesPrensas mecánicas e hidráulicasMadrigal GarcíaPas encore d'évaluation
- Presupuesto IISS - LP6Document191 pagesPresupuesto IISS - LP6luisPas encore d'évaluation
- Hidraulica 985Document3 pagesHidraulica 985Hernán KeglerPas encore d'évaluation
- El Torno Paralelo HorizontalDocument66 pagesEl Torno Paralelo Horizontaljuan david lucumiPas encore d'évaluation
- Manual de Mantenimiento Preventivo para Elevador de Cangilones-1Document10 pagesManual de Mantenimiento Preventivo para Elevador de Cangilones-1Facundo RéPas encore d'évaluation
- Historia de Los Motores de C.I.Document36 pagesHistoria de Los Motores de C.I.Elkin Andrw NoriegaPas encore d'évaluation
- Actuadores MecanicosDocument4 pagesActuadores MecanicosDennis Flores Vargas50% (4)
- Manual Reparacion Polaco Parte IIIDocument5 pagesManual Reparacion Polaco Parte IIIJoel MoralesPas encore d'évaluation
- 02 Convertidor de Esfuerzo de Torsión - DesmontarDocument8 pages02 Convertidor de Esfuerzo de Torsión - DesmontarWilder OportoPas encore d'évaluation
- Hoja de Procesos CaballoDocument2 pagesHoja de Procesos CaballogfdsacxzPas encore d'évaluation
- 10 - Equipo de Bombeo de Fluidos LiquidosDocument5 pages10 - Equipo de Bombeo de Fluidos LiquidosJoseph García100% (1)
- Tundra 24Document18 pagesTundra 24Berenice EscangaPas encore d'évaluation
- Sistema Hidráulico Del Tren de FuerzaDocument6 pagesSistema Hidráulico Del Tren de FuerzagianiPas encore d'évaluation
- Avo 72-172 B BG Bli 72-152 Bci 72-172 Bvi 102-152Document50 pagesAvo 72-172 B BG Bli 72-152 Bci 72-172 Bvi 102-152mike100% (2)