Vous aimerez peut-être aussi
- Manual de Operador L150E, L180E, L220EDocument254 pagesManual de Operador L150E, L180E, L220EJuanCarl0s1083% (18)
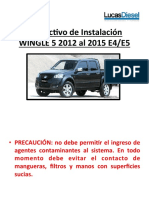
- Instructivo Great Wall WingleDocument16 pagesInstructivo Great Wall WingleLeonardo Corato100% (2)
- Curso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaD'EverandCurso moderno de máquinas eléctricas rotativas. Tomo II: Máquinas de corriente continuaPas encore d'évaluation
- Medidas Autorizadas Camiones de CargaDocument4 pagesMedidas Autorizadas Camiones de CargaArq Lucero ApZep57% (7)
- Robot Laberinto Con Control PIDDocument9 pagesRobot Laberinto Con Control PIDJonathan Medardo BautistaPas encore d'évaluation
- Informe Von NeumannDocument11 pagesInforme Von NeumannLuis Montenegro RodriguezPas encore d'évaluation
- Manual Bronco Sport 2021 02Document437 pagesManual Bronco Sport 2021 02Maria LauraPas encore d'évaluation
- Mini SumoDocument7 pagesMini SumoAldo Alexis Perez DiazPas encore d'évaluation
- Documento LaberintoDocument6 pagesDocumento LaberintoFrancisco ali Amet barajasPas encore d'évaluation
- Proyecto de Aula Tercera Entrega CircuitosDocument5 pagesProyecto de Aula Tercera Entrega CircuitosANDRES DAVID TIRADO GALLARDOPas encore d'évaluation
- Informe Seguidor de Linea4Document29 pagesInforme Seguidor de Linea4Fernando NancoPas encore d'évaluation
- Robot Seguidor de Lineas: "Robolin"Document3 pagesRobot Seguidor de Lineas: "Robolin"javierPas encore d'évaluation
- Proyecto Final de Cafi 2Document7 pagesProyecto Final de Cafi 2Anghelo David Palomino ArevaloPas encore d'évaluation
- Seguidor de LineaDocument18 pagesSeguidor de LineaFlow87Pas encore d'évaluation
- Taller de Tecnologia e Informatica La RoboticaDocument2 pagesTaller de Tecnologia e Informatica La RoboticaJonatan Castillo100% (2)
- Robot Seguidor de LineaDocument16 pagesRobot Seguidor de LineaAnaLupeP̶a̶x̶i̶Pas encore d'évaluation
- Informe Robótica 2Document15 pagesInforme Robótica 2Joshep LuisPas encore d'évaluation
- Diseño Con Sensores y ActuadoresDocument7 pagesDiseño Con Sensores y ActuadoresGadiel Armijos VPas encore d'évaluation
- Robotica BasicaDocument37 pagesRobotica BasicaAna Gabriela Rojas ReasPas encore d'évaluation
- Balancing RobotDocument5 pagesBalancing RobotPaulcrzPas encore d'évaluation
- Montajes ElectrónicosDocument4 pagesMontajes ElectrónicosHoracio Daniel VallejoPas encore d'évaluation
- Informe de Laboratorio N4 ADCDocument4 pagesInforme de Laboratorio N4 ADCJose Miguel LariosPas encore d'évaluation
- RobóticaDocument4 pagesRobóticahaeders saldarriagaPas encore d'évaluation
- Ensayo Construccion de Un Robot MovilDocument9 pagesEnsayo Construccion de Un Robot MovilAndre LoeraPas encore d'évaluation
- Reporte Exoesqueleto-RobotDocument25 pagesReporte Exoesqueleto-RobotAlfredo RsznPas encore d'évaluation
- Cuestionario MecatronicaDocument6 pagesCuestionario MecatronicaEduardo Cruz SanchezPas encore d'évaluation
- Proyecto CaladoraDocument4 pagesProyecto Caladoranicolas carreñoPas encore d'évaluation
- Diseño de Un Robot Empleando LEGO MINDSTORMS NXT 2.0Document6 pagesDiseño de Un Robot Empleando LEGO MINDSTORMS NXT 2.0Jaime De PazPas encore d'évaluation
- 18a Plantilla Articulo de DibulgaciónDocument5 pages18a Plantilla Articulo de DibulgaciónMaria Reyna Segura FloresPas encore d'évaluation
- Khepera III FinalDocument19 pagesKhepera III FinalOscar Gómez HernándezPas encore d'évaluation
- ROBOT Seguidor de Linea ProporcionalDocument6 pagesROBOT Seguidor de Linea Proporcionaljag9402Pas encore d'évaluation
- Proyecto Seguidor de LíneaDocument5 pagesProyecto Seguidor de LíneaElias LadinoPas encore d'évaluation
- 03 - Moran Urcia Yoexer EliasDocument4 pages03 - Moran Urcia Yoexer EliasElias TorresPas encore d'évaluation
- Laboratorio: Profesor: Ing. Hugo Zaracho Carrera: Ingeniería en SistemasDocument7 pagesLaboratorio: Profesor: Ing. Hugo Zaracho Carrera: Ingeniería en SistemasGiovana MarachiPas encore d'évaluation
- Práctica 1 Unidad 2Document7 pagesPráctica 1 Unidad 2Ola OlaPas encore d'évaluation
- Construcción de Una Araña RobóticaDocument8 pagesConstrucción de Una Araña RobóticaLuis Valky Metin PlenilunioPas encore d'évaluation
- Oso Hormiguero PDFDocument19 pagesOso Hormiguero PDFjrm123Pas encore d'évaluation
- Reporte Proyecto Seguidor de LineasDocument5 pagesReporte Proyecto Seguidor de LineasMARCO ANTONIO HERNANDEZ HERNANDEZPas encore d'évaluation
- Título Del Proyecto de RoboticaDocument15 pagesTítulo Del Proyecto de RoboticaYilmer Locutor DjyilmerPas encore d'évaluation
- Proyecto Final UtrillaDocument4 pagesProyecto Final UtrillaAngel David CruzPas encore d'évaluation
- Lab 2.2 Grupo 5Document10 pagesLab 2.2 Grupo 5Eddy Cadena GrandaPas encore d'évaluation
- Robot Seguidor de LineaDocument4 pagesRobot Seguidor de Lineacheco66666Pas encore d'évaluation
- Proyecto Manual de Usuario Carro Seguidor de LineaDocument41 pagesProyecto Manual de Usuario Carro Seguidor de Lineajose medina100% (1)
- Robot Seguidor de Línea AnalógicoDocument4 pagesRobot Seguidor de Línea Analógiconocturno rilez100% (1)
- Robot Seguidor de LuzDocument11 pagesRobot Seguidor de LuzAnaLupeP̶a̶x̶i̶100% (1)
- Informe Sobre Robot Seguidor de Línea Con Sensor Óptico InfrarrojoDocument6 pagesInforme Sobre Robot Seguidor de Línea Con Sensor Óptico InfrarrojoestebanPas encore d'évaluation
- Seguidor de LineaDocument15 pagesSeguidor de LineaNicole AlemánPas encore d'évaluation
- SeguidorfinalDocument11 pagesSeguidorfinalDavid Rincón SánchezPas encore d'évaluation
- Informe LaboratorioDocument4 pagesInforme LaboratorioAlexis BarcoPas encore d'évaluation
- Informe Mini Sumo Digitales 1Document4 pagesInforme Mini Sumo Digitales 1Yair Sebastian Herrera VegaPas encore d'évaluation
- Taller de Tecnologia e Informatica La RoboticaDocument2 pagesTaller de Tecnologia e Informatica La RoboticaBEATRIZ ELENA ALVAREZ GONZALEZPas encore d'évaluation
- Informe Robot SumoDocument10 pagesInforme Robot SumoAdrian Avendaño MachucaPas encore d'évaluation
- Seguidor de LuzDocument7 pagesSeguidor de LuzAngelPas encore d'évaluation
- ProyectooooDocument20 pagesProyectooooHuber Vela MéndezPas encore d'évaluation
- CrocodileDocument5 pagesCrocodileJuank SimbañaPas encore d'évaluation
- Reportes Diseño de Sistemas DigitalesDocument3 pagesReportes Diseño de Sistemas DigitalesAndre Pio MuñozPas encore d'évaluation
- Seguidor de Linea NegraDocument6 pagesSeguidor de Linea NegraAndrés TulcánPas encore d'évaluation
- Informe RatonDocument17 pagesInforme RatonJuan VasquezPas encore d'évaluation
- Informe de La Araña RobóticaDocument25 pagesInforme de La Araña Robóticasebastian100% (1)
- GFPI-F-019 - Formato - Guia - de - Aprendizaje 1Document19 pagesGFPI-F-019 - Formato - Guia - de - Aprendizaje 1GERARDO ANDRES RUGE VILLANUEVAPas encore d'évaluation
- SdasdasasdDocument25 pagesSdasdasasdJHORDAM MAXWELL GOMEZ TORRESPas encore d'évaluation
- Electronicafinal PDFDocument9 pagesElectronicafinal PDFA L E X0% (1)
- Curso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorD'EverandCurso moderno de máquinas eléctricas rotativas. Tomo IV: Máquinas síncronas y motores c.a. de colectorPas encore d'évaluation
- 100 Circuitos de Shields para MotoresD'Everand100 Circuitos de Shields para MotoresÉvaluation : 4.5 sur 5 étoiles4.5/5 (4)
- UF0863 - Reparación y ampliación de equipos y componentes hardware microinformáticosD'EverandUF0863 - Reparación y ampliación de equipos y componentes hardware microinformáticosPas encore d'évaluation
- Exposicion CepilladoraDocument24 pagesExposicion CepilladoraDylan MedranoPas encore d'évaluation
- Ensayo 10 Prueba de Traccion de Autos en El Banco de Tambores de MarchaDocument7 pagesEnsayo 10 Prueba de Traccion de Autos en El Banco de Tambores de MarchaRaul PerezPas encore d'évaluation
- Control de Giro y Velocidad de Un MotorDocument12 pagesControl de Giro y Velocidad de Un MotorJ.P. ZavalaPas encore d'évaluation
- Bezares Data Sheet 1000Document4 pagesBezares Data Sheet 1000reincidentesk8Pas encore d'évaluation
- Airbags - AutodataDocument2 pagesAirbags - Autodataxxxxxxxxx_-16XPas encore d'évaluation
- Manual de Practicas de Diodos y Transistores - P1 - UNIDAD I RubricaDocument9 pagesManual de Practicas de Diodos y Transistores - P1 - UNIDAD I RubricaEliasPas encore d'évaluation
- Informe MagnetizadorDocument2 pagesInforme MagnetizadorFelipe A. CalderonPas encore d'évaluation
- FMS Practica N1Document50 pagesFMS Practica N1Cristian AndrangoPas encore d'évaluation
- Maquinarias Electricas 02-1aDocument61 pagesMaquinarias Electricas 02-1aRichard Andres Bravo Asanza100% (1)
- Caso 1Document2 pagesCaso 1cristh sanchezPas encore d'évaluation
- Intensifi C AdoresDocument4 pagesIntensifi C AdoresAngelPas encore d'évaluation
- Williams Railing Baluster Stair Railing Instructions SpanishDocument2 pagesWilliams Railing Baluster Stair Railing Instructions SpanishEdgard Fernando Nontol PastorPas encore d'évaluation
- Trabajo MotoresDocument26 pagesTrabajo MotoresJuan Andres MaldonadoPas encore d'évaluation
- Medidor de Intensidad de Lector Láser de CD y DVDDocument3 pagesMedidor de Intensidad de Lector Láser de CD y DVDcarlos16702014Pas encore d'évaluation
- El Cabezal Divisor2Document18 pagesEl Cabezal Divisor2Alfredo GonzalezPas encore d'évaluation
- Problemas Ruedas de Fricción y CorreasDocument6 pagesProblemas Ruedas de Fricción y CorreasAlbert Martinez100% (1)
- Mantenimiento de Un Martillo PerforadorDocument73 pagesMantenimiento de Un Martillo PerforadorDeisy NayivePas encore d'évaluation
- Instrumentos Analógicos y DigitalesDocument27 pagesInstrumentos Analógicos y DigitalesttavvoPas encore d'évaluation
- Sony FX6 Manual EspañolDocument135 pagesSony FX6 Manual EspañolIvar VelasquezPas encore d'évaluation
- Monoprice All in One DJDocument9 pagesMonoprice All in One DJWallacePas encore d'évaluation
- Constitucion Sociedad Por Acciones Simplificada SAS 1Document170 pagesConstitucion Sociedad Por Acciones Simplificada SAS 1Manuel FernándezPas encore d'évaluation
- Rebobinado Del RotorDocument3 pagesRebobinado Del RotorOmar Milton Condori Peña0% (1)
- REÓSTATODocument9 pagesREÓSTATOApolinario117Pas encore d'évaluation
- Claved Catálogo Sevillana Endesa 2017Document41 pagesClaved Catálogo Sevillana Endesa 2017VEMATELPas encore d'évaluation
- Catalogo Speedway INTERNACIONALDocument67 pagesCatalogo Speedway INTERNACIONALFabio Baron100% (1)