Vous aimerez peut-être aussi
- AULA 4 Elementos de FixaçãoDocument9 pagesAULA 4 Elementos de FixaçãoEtieverrePas encore d'évaluation
- A Gestão Do Tempo e Do EspaçoDocument52 pagesA Gestão Do Tempo e Do EspaçoGuilherme Antunes100% (2)
- MODULO 11 - EletrotermofototerapiaDocument108 pagesMODULO 11 - EletrotermofototerapiaMarina PaulaPas encore d'évaluation
- 3 Exercícios de Índices FísicosDocument5 pages3 Exercícios de Índices FísicosFernando Aguiar0% (1)
- Apostila de Terapia ManualDocument109 pagesApostila de Terapia Manual5725434391% (32)
- Trabalho Arquitetura - CCTV, ChinaDocument14 pagesTrabalho Arquitetura - CCTV, ChinahmsprisPas encore d'évaluation
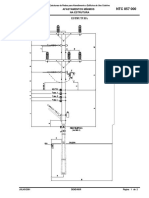
- NTC 857000 - Afastamento Mínimos Na EstruturaDocument2 pagesNTC 857000 - Afastamento Mínimos Na EstruturaFabio SPas encore d'évaluation
- Preparação de SoluçõesDocument10 pagesPreparação de SoluçõesChadrekzy January PungosPas encore d'évaluation
- Tópicos de Física Vol. 1 HidrostáticaDocument5 pagesTópicos de Física Vol. 1 HidrostáticaAllan LauzidPas encore d'évaluation
- Form - 13 - Plano e Controle de CalibraçãoDocument9 pagesForm - 13 - Plano e Controle de CalibraçãoMax SantosPas encore d'évaluation
- Aula9 Calculo Estequiometrico-1Document2 pagesAula9 Calculo Estequiometrico-1malufreitassPas encore d'évaluation
- TUP Catalogo PT TupyDocument106 pagesTUP Catalogo PT TupyCelso ArchanjoPas encore d'évaluation
- Cálculo de Reatores Catalíticos Gás-Sólido - Volume 1 - Cinética e Fenômenos de TransferênciaDocument336 pagesCálculo de Reatores Catalíticos Gás-Sólido - Volume 1 - Cinética e Fenômenos de Transferênciavazzoleralex6884100% (1)
- DNIT141 2010 ES Base EstabilizadaDocument9 pagesDNIT141 2010 ES Base EstabilizadafrancypbPas encore d'évaluation
- Grupo-6 Turma - ADocument27 pagesGrupo-6 Turma - AShelton DavaPas encore d'évaluation
- A Guerra Dos Anjos Dominio Espiritual PDFDocument640 pagesA Guerra Dos Anjos Dominio Espiritual PDFDorian Grey100% (1)
- Estatistica Aplicada PDFDocument5 pagesEstatistica Aplicada PDFRitiele Vieiira100% (1)
- Plano de Aulas - Matérias Suicidas - Matemática - Monitora. Ônula Alves PDFDocument1 pagePlano de Aulas - Matérias Suicidas - Matemática - Monitora. Ônula Alves PDFWiliam LopesPas encore d'évaluation
- Mecanica 1 - CinemáticaDocument4 pagesMecanica 1 - CinemáticaLeonardoPas encore d'évaluation
- Lista de Exercicios Da Disciplina de Comunicação Óptica.Document2 pagesLista de Exercicios Da Disciplina de Comunicação Óptica.Maitsudá MatosPas encore d'évaluation
- Técnica Hertz DetalhadaDocument7 pagesTécnica Hertz DetalhadaElianaReyss100% (4)
- 3Cd Changer Mini Hi-Fi System: Manual de ManutençãoDocument65 pages3Cd Changer Mini Hi-Fi System: Manual de ManutençãoAnonymous Lfgk6vyg100% (2)
- Definição, Medição e Transmissão de PressãoDocument55 pagesDefinição, Medição e Transmissão de PressãoVisitantePas encore d'évaluation
- Momento ElétricoDocument20 pagesMomento ElétricoGian CorreiaPas encore d'évaluation
- Resumo - Trabalho e Potência - RevisãoDocument1 pageResumo - Trabalho e Potência - RevisãoEuvaldo Soares da SilvaPas encore d'évaluation
- Deus Na Pessoa Humana Segundo PannenbergDocument125 pagesDeus Na Pessoa Humana Segundo PannenbergDiego Rivero100% (1)
- Ociosidade Social OCRDocument1 pageOciosidade Social OCRHellen Bataus100% (1)
- Aula02-Escoam Superf Livre-2Document36 pagesAula02-Escoam Superf Livre-2GabrielaUllerPas encore d'évaluation