Vous aimerez peut-être aussi
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsD'EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsPas encore d'évaluation
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)D'EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Pas encore d'évaluation
- Ch917 Review SolsDocument6 pagesCh917 Review SolsAnonymous D1mQfaOsIPas encore d'évaluation
- Solution Techniques For Elementary Partial Differential Equations, Third Edition, Instructors Solutions Manual Y)Document192 pagesSolution Techniques For Elementary Partial Differential Equations, Third Edition, Instructors Solutions Manual Y)quasiestelarPas encore d'évaluation
- 2015 05 27 - Soln EngDocument5 pages2015 05 27 - Soln EngDiegoPas encore d'évaluation
- MA3264Tutorial2 Solutions by LinDocument8 pagesMA3264Tutorial2 Solutions by LinTim CookPas encore d'évaluation
- MspacesDocument29 pagesMspacesNitish KumarPas encore d'évaluation
- EM701p First-Order Ordinary Differential EquationsDocument31 pagesEM701p First-Order Ordinary Differential EquationsDHT845Pas encore d'évaluation
- 09 Aop456Document29 pages09 Aop456walter huPas encore d'évaluation
- FemDocument165 pagesFemmeda012Pas encore d'évaluation
- Neumann Series Seen As Expansion Into Bessel Functions $J - (N) $ Based On Derivative Matching.Document8 pagesNeumann Series Seen As Expansion Into Bessel Functions $J - (N) $ Based On Derivative Matching.andrej_liptajPas encore d'évaluation
- 7.1 Lecture Part 1 Special DerivativesDocument13 pages7.1 Lecture Part 1 Special Derivativeschihaoli76Pas encore d'évaluation
- Lecture Notes On The Ellipsoid AlgorithmDocument8 pagesLecture Notes On The Ellipsoid AlgorithmAlex CorquePas encore d'évaluation
- FirstorderDocument26 pagesFirstorderHimanshu PatidarPas encore d'évaluation
- Performance Innovative Task in DE (Differential Equation)Document29 pagesPerformance Innovative Task in DE (Differential Equation)Reyvy AlcardePas encore d'évaluation
- Module 2 - First Order ODEDocument112 pagesModule 2 - First Order ODEGabrielle LegaspiPas encore d'évaluation
- HW1 Separable AnsDocument2 pagesHW1 Separable AnsEDWARD DE ASISPas encore d'évaluation
- Y LN (X 1 x+1: Example 1 SolutionDocument4 pagesY LN (X 1 x+1: Example 1 SolutionHin Wa LeungPas encore d'évaluation
- T Rget-Cent Ccnturn) Differjntial Equations: Pitter Etial Eq - U TionDocument8 pagesT Rget-Cent Ccnturn) Differjntial Equations: Pitter Etial Eq - U Tionydouneed2012Pas encore d'évaluation
- Dimension Reduction and Hidden Structure: 1.1 Principal Component Analysis (PCA)Document40 pagesDimension Reduction and Hidden Structure: 1.1 Principal Component Analysis (PCA)SPas encore d'évaluation
- 5 - Differential - Forms - and - Exterior - Derivatives (Errata)Document16 pages5 - Differential - Forms - and - Exterior - Derivatives (Errata)Luigi Teixeira de SousaPas encore d'évaluation
- m2 Digital Notes (r18)Document160 pagesm2 Digital Notes (r18)nine constructionsPas encore d'évaluation
- Chapter-1 Only 40 Pages PDFDocument40 pagesChapter-1 Only 40 Pages PDFTapas Kumar DasPas encore d'évaluation
- 1st Order ODE and Its ApplicationsDocument76 pages1st Order ODE and Its ApplicationsMuhammad EhsanPas encore d'évaluation
- Lect 6Document20 pagesLect 6AmalAbdlFattahPas encore d'évaluation
- Mat 241 Lectures-1 (1) - 1Document66 pagesMat 241 Lectures-1 (1) - 1Animashaun OlawalePas encore d'évaluation
- Differentiation: Dy DX Dy DZ × DZ DXDocument2 pagesDifferentiation: Dy DX Dy DZ × DZ DXPatro GoodfridayPas encore d'évaluation
- Cardinal Functions and Integral FunctionDocument14 pagesCardinal Functions and Integral FunctionAnghel-Alexandru GheneaPas encore d'évaluation
- Notes For The Exponential Function'Document3 pagesNotes For The Exponential Function'Rajdeep ChopdekarPas encore d'évaluation
- Practice Homework SetDocument58 pagesPractice Homework SetTro emaislivrosPas encore d'évaluation
- Ignore The Topics Unmentioned Before Midterm Exercises Set 1Document9 pagesIgnore The Topics Unmentioned Before Midterm Exercises Set 1silatahmaz6Pas encore d'évaluation
- 2 Frobenius Series Solution of Ordinary Differential EquationsDocument7 pages2 Frobenius Series Solution of Ordinary Differential EquationsSubhadip PalPas encore d'évaluation
- Separation of Variables Worksheet - 2010 - 2011 - AP CALCULUS AB/BCDocument1 pageSeparation of Variables Worksheet - 2010 - 2011 - AP CALCULUS AB/BCteachopensourcePas encore d'évaluation
- Examples of Separation of Variables: Dy DXDocument4 pagesExamples of Separation of Variables: Dy DXFahad AbdullahtPas encore d'évaluation
- First Order Differential EquationsDocument18 pagesFirst Order Differential Equationsshan kumarPas encore d'évaluation
- Ordinary Differential Equations Lecture Notes: DR E.T. Ngarakana-GwasiraDocument39 pagesOrdinary Differential Equations Lecture Notes: DR E.T. Ngarakana-GwasiraIrvine MugauriPas encore d'évaluation
- Dr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielDocument4 pagesDr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielkevwePas encore d'évaluation
- Lec03 2015eightDocument41 pagesLec03 2015eightAbdelmajid AbouloifaPas encore d'évaluation
- Systems of Differential Equations: 1 ExercicesDocument8 pagesSystems of Differential Equations: 1 ExercicesVarga AdrianPas encore d'évaluation
- Sms Essay 2Document6 pagesSms Essay 2akhile293Pas encore d'évaluation
- FreeFEM Tutorial ShovkunDocument6 pagesFreeFEM Tutorial ShovkunMohamad TayeaPas encore d'évaluation
- 8.4 Trig Integrals: Powers of A Single Trig FunctionDocument6 pages8.4 Trig Integrals: Powers of A Single Trig FunctionMarco PlaysPas encore d'évaluation
- Week 1 WorksheetDocument10 pagesWeek 1 WorksheetAubrey LastimosaPas encore d'évaluation
- Final Exam, Math 1B August 13, 2010Document14 pagesFinal Exam, Math 1B August 13, 2010jwwsPas encore d'évaluation
- 2nd To 1st OrderDocument29 pages2nd To 1st OrderAdithya ChandrasekaranPas encore d'évaluation
- Math2065: Intro To Pdes Tutorial Solutions (Week 1) : 3t 5 (1 Z) 3t 3t 4 3 3tDocument3 pagesMath2065: Intro To Pdes Tutorial Solutions (Week 1) : 3t 5 (1 Z) 3t 3t 4 3 3tTOM DAVISPas encore d'évaluation
- Homework 2 SolutionsDocument5 pagesHomework 2 Solutionserica.greene64Pas encore d'évaluation
- Metric Tensor: I I I IDocument43 pagesMetric Tensor: I I I Imanjunath RamachandraPas encore d'évaluation
- Statistics and Finance: An: David RuppertDocument46 pagesStatistics and Finance: An: David Ruppertmastanoob50% (2)
- 5 Separation of VariablesDocument10 pages5 Separation of VariablesFrancis Marc AlcantaraPas encore d'évaluation
- Problem Set #3. Due Sept. 24 2020.: MAE 501 - Fall 2020. Luc Deike, Anastasia Bizyaeva, Jiarong Wu September 17, 2020Document2 pagesProblem Set #3. Due Sept. 24 2020.: MAE 501 - Fall 2020. Luc Deike, Anastasia Bizyaeva, Jiarong Wu September 17, 2020Francisco SáenzPas encore d'évaluation
- Lecture 7: Diagnostics: 36-401, Fall 2017, Section BDocument35 pagesLecture 7: Diagnostics: 36-401, Fall 2017, Section BSPas encore d'évaluation
- Numerical Methods: y X y X DX DyDocument62 pagesNumerical Methods: y X y X DX DyAditya CherukuriPas encore d'évaluation
- Lời Giải Chương 14Document3 pagesLời Giải Chương 14Linh VoPas encore d'évaluation
- 1 Solving First Order Linear Differential EquationsDocument4 pages1 Solving First Order Linear Differential EquationsmrtfkhangPas encore d'évaluation
- Sys SolDocument9 pagesSys SolNANA NANAPas encore d'évaluation
- Solving Pdes Using Laplace Transforms, Chapter 15Document10 pagesSolving Pdes Using Laplace Transforms, Chapter 15A RPas encore d'évaluation
- MATH1500 Notes PDFDocument7 pagesMATH1500 Notes PDFruiyu liuPas encore d'évaluation
- MIT18 01SCF10 Ses15b PDFDocument4 pagesMIT18 01SCF10 Ses15b PDFRonald LPas encore d'évaluation
- A Ball Player's Career Being The Personal Experiences and Reminiscensces of Adrian C. Anson by Anson, Adrian Constantine, 1852-1922Document171 pagesA Ball Player's Career Being The Personal Experiences and Reminiscensces of Adrian C. Anson by Anson, Adrian Constantine, 1852-1922Gutenberg.orgPas encore d'évaluation
- 200 XC USA 2008: Spare Parts Manual: ChassisDocument32 pages200 XC USA 2008: Spare Parts Manual: ChassischarlesPas encore d'évaluation
- Moir 2017Document21 pagesMoir 2017Chris Sake100% (1)
- Peoria County Inmates 12/15/12Document8 pagesPeoria County Inmates 12/15/12Journal Star police documentsPas encore d'évaluation
- Hu - 001 Timetable From 8 March 2021Document1 pageHu - 001 Timetable From 8 March 2021Dave FullerPas encore d'évaluation
- Elan Skis Racing Catalogue 1314 PDFDocument7 pagesElan Skis Racing Catalogue 1314 PDFwest werbeagenturPas encore d'évaluation
- Latin American DanceDocument4 pagesLatin American DanceAngeline AsuncionPas encore d'évaluation
- Fitness GuidesDocument8 pagesFitness Guidesinsilda0% (2)
- Drnhs Unified Quarterly Assessment Answer SheetDocument1 pageDrnhs Unified Quarterly Assessment Answer Sheetwilliam FELISILDAPas encore d'évaluation
- Recess Games Rotations LPDocument3 pagesRecess Games Rotations LPapi-507051575Pas encore d'évaluation
- Hydraulic Systems - Hydraulic Schema - Pilot Circuit: Suction, Delivery and Return CircuitDocument28 pagesHydraulic Systems - Hydraulic Schema - Pilot Circuit: Suction, Delivery and Return Circuitroparts clujPas encore d'évaluation
- Could You Please Come Over? I Need You HelpingDocument3 pagesCould You Please Come Over? I Need You HelpingnguyenvanPas encore d'évaluation
- General Merit List BS 4 Years Criminology Replica 202127Document16 pagesGeneral Merit List BS 4 Years Criminology Replica 202127Ch bilal Ch bilalPas encore d'évaluation
- Vermeer TD120Document29 pagesVermeer TD120Bernie PolegaPas encore d'évaluation
- Ballroom DancesDocument14 pagesBallroom DancesLester GarciaPas encore d'évaluation
- CB Golf 2010 2011Document89 pagesCB Golf 2010 2011mail_markhawleyPas encore d'évaluation
- The Fashion Revolution Brought by Audrey HepburnDocument10 pagesThe Fashion Revolution Brought by Audrey HepburnvarunPas encore d'évaluation
- Mansions of Madness Second Editon Rules ReferenceDocument24 pagesMansions of Madness Second Editon Rules ReferenceGeorge AlexandrisPas encore d'évaluation
- Use QR Code QR Code To VERIFY Paper: Auction List ExplanationDocument2 pagesUse QR Code QR Code To VERIFY Paper: Auction List ExplanationNasirMahmoodPas encore d'évaluation
- Breaking Muscle-Special Forces Workouts Cycle 2Document35 pagesBreaking Muscle-Special Forces Workouts Cycle 2John Long100% (2)
- Proposal For Changes in The Material RegulationDocument14 pagesProposal For Changes in The Material RegulationZeljko TrajilovicPas encore d'évaluation
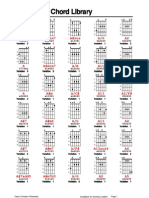
- SongBase Chord LibraryDocument22 pagesSongBase Chord LibraryHenry GarzónPas encore d'évaluation
- Energi Hydra SeriesDocument3 pagesEnergi Hydra Series4rsh1Pas encore d'évaluation
- Delta GreenDocument310 pagesDelta Greenpopscythe100% (14)
- AuctionPricelist PDFDocument28 pagesAuctionPricelist PDFben foldsPas encore d'évaluation
- D&D Character Sheet 18Document3 pagesD&D Character Sheet 18greta ubermenschPas encore d'évaluation
- Katalog CostumeDocument2 pagesKatalog CostumeRosyida AnamPas encore d'évaluation
- Basic Impetus FantasyDocument31 pagesBasic Impetus FantasyLuigi SardelloPas encore d'évaluation
- Zsa LitaDocument150 pagesZsa LitaSam Valdez0% (1)