Académique Documents
Professionnel Documents
Culture Documents
4 Centrifuge Modeling and Numerical Modeling
Transféré par
HawaiiChong0 évaluation0% ont trouvé ce document utile (0 vote)
13 vues52 pages4 Centrifuge Modeling and Numerical Modeling
Copyright
© © All Rights Reserved
Formats disponibles
PDF ou lisez en ligne sur Scribd
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce document4 Centrifuge Modeling and Numerical Modeling
Droits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme PDF ou lisez en ligne sur Scribd
0 évaluation0% ont trouvé ce document utile (0 vote)
13 vues52 pages4 Centrifuge Modeling and Numerical Modeling
Transféré par
HawaiiChong4 Centrifuge Modeling and Numerical Modeling
Droits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme PDF ou lisez en ligne sur Scribd
Vous êtes sur la page 1sur 52
CHAPTER 13
Centrifuge modelling of soil behaviour
13.1 Introduction
Physical modelling of soil behaviour has always played a pivotal role in
helping the designer acquire a better understanding of the actual behaviour
under similar stress conditions in the field. In this respect, laboratory tests
such as triaxial, consolidation and shear box tests are still used extensively
and do provide reliable data provided that adequate testing procedures are
adhered to. Centrifuge testing of soils constitutes another (recent)
development in the field of physical modelling, which has taken off quite
rapidly. More and more research laboratories are equipped with centrifuge
centres, and the research outcome in this field is becoming widely
available so that comparative studies can be undertaken, leading to the
development of ever more sophisticated instrumentation equipment.
As in the case of triaxial testing, for instance, a centrifuge test is
undertaken on a small size sample of soil, referred to as the model, in a
way that stress conditions corresponding to a particular event (such as
subjecting a pile to a lateral load for example), or to a particular process
(as in the case of the execution of an excavation, or the construction of an
embankment) are recreated via an inertial acceleration field. Under such
loading conditions, the behaviour of the mode/ should be, in theory, a
replica of that of the actual soil (often referred to as the prototype), when
subjected to a similar state of stresses.
Notwithstanding the practical difficulties related to model preparation and
instrumentation, centrifuge modelling is regarded as a valuable means of
testing that enhances markedly the understanding of the physical behaviour
of soils under complex static or dynamic stress fields (see for instance the
paper by Schofield (1980)). Examples vary widely and include (classical)
problems such as the stability of slopes, retaining structures, embankments,
foundations and tunnels, as well as heat transfer (that is conduction and
692 CENTRIFUGE MODELLING OF SOIL BEHAVIOUR
convection), diffusion (i.e. consolidation), seepage, earthquakes, wave
loading, contaminant transport, freeze/thaw and the effects of deep mining.
13.2 Modelling principles, stress similarities
The basic principle of centrifuge testing consists of creating stress
conditions which are similar to those applied through gravity in the field to
a prototype, in or on a model, with dimensions which are much smaller
than those of the prototype. This can be achieved by placing the model in a
basket at the end of a centrifuge boom, then subjecting it to an inertial
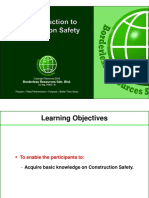
acceleration field. The main features of a centrifuge equipment are
depicted in figure 13.1, corresponding to an Acutronic 680 centrifuge,
capable of developing a maximum acceleration of 200g (g being the
acceleration due to gravity), and whose technical details can be found for
instance in the book Centrifuge 88 edited by Corté (1988).
basket in full swing ounterweight
centrifuge boom
aerodynamic enclosure
drive system A
ce
Figure 13.1: Acutronic 680 centrifuge.
In the following analysis, the subscript m refers to the model and the
subscript p is used in conjunction with the prototype.
MODELLING PRINCIPLES, STRESS SIMILARITIES 693
Thus, assuming that all soil properties, including those of the porewater,
are identical for the prototype and for the model, and referring to figure
13.2, it is seen that, for a model with a dimension R/n (n being an integer),
placed at a distance R (which can be the effective radius of a centrifuge, for
instance) from the centre of rotation, and subjected to an acceleration Ng
(ie. N times the acceleration due to gravity g), the centrifugal stress Om is,
in theory, similar to the vertical stress oy, due to the self weight of soil in
a prototype having a dimension NR/n.
on angular velocity @
—_ force
Figure 13.2:Effect of inertial forces on stress
similarities between model and prototype.
Accordingly, if the respective dimensions of the model and prototype
were:
hin=% and hyp =NE
then the vertical stress Gym at a depth Am in the model, induced by an
acceleration Ng will be:
Sym = Npghm (13.1)
Similarly, the vertical stress oy, at depth Ap in the prototype is:
vp = pghp (13.2)
694 CENTRIFUGE MODELLING OF SOIL BEHAVIOUR
p, in both equations, being the soil density.
If the stresses are similar, then clearly the dimensions of the model and
prototype are such that:
hp
him = = .
m= (133)
In practice however, the similarity between Gym and Oyp is affected to a
certain degree by the negative centripetal (or inertial) forces applied to the
model due to the variation of the angular velocity with the radius r.
Referring once more to figure 13.2, it can be seen that the stress Oy», at the
base of the model can be evaluated as follows:
R 2
= andr = a? (an=1) 134)
ove Tee porrar = pas n? (13.4)
Moreover, the vertical stress due to gravity at the base of the prototype is:
Ov = penE (13.5)
Consequently, for these two stresses to be similar, equations 13.4 and 13.5
must be equal. Whence:
N,
Om =Oy > oesl-$ (13.6)
It can be shown that if the stresses Oym at a depth R/n and Gyp at a depth
NR/nare similar, then the maximum stress difference (i.e. error) defined as:
Ow —5.
AS= (13.7)
occurs at a depth R/2n in the model and NR/2n in the prototype (see for
instance Taylor (1995)). Thus, evaluating the stresses at these respective
depths, it follows that:
-R (1-1/2n) R
ae f pordr = po? (4n—3) (13.8)
R(1-In) 8n2
MODELLING PRINCIPLES, STRESS SIMILARITIES 695
and
R
Ow = pEN5- (13.9)
Consequently, it is easy to show that the error corresponding to equation
13.7 is such that:
4nNs
As=— 5 (13.10)
@7*R(4n-3)
Hence, substituting for the quantity Ng/o?R from equation 13.6 in
equation 13.10 and rearranging, it follows that:
1
as=py (13.11)
Moreover, assuming there is similarity of stresses at two-thirds model
depth as depicted in figure 13.3, then the graph corresponding to the
maximum error AS calculated from equation 13.11, and shown in figure
13.4, indicates that for an n value larger than 10, the ensuing error (i.e. the
shaded area in figure 13.4) is smaller than 3% and therefore negligible.
model prototype
2
2N Am
Figure 13.3: Scaling errors due to inertial forces in the model.
In practice, a value n = 10 is typical in geotechnical centrifuge testing, so
that the model height corresponds to one-tenth of the effective centrifuge
radius (measured from the centre of rotation to one-third the model depth).
696 CENTRIFUGE MODELLING OF SOIL BEHAVIOUR
5 10 IS 20
n
Figure 13.4: Error magnitude related to model dimensions.
13.3 Scale effects
The previous analysis of stress similarities between model and prototype
serves as a reminder of the fact that physical (especially centrifuge)
modelling of soils is affected by the reduction in dimensions of the tested
volume of soil. The scale effects are not, however, limited to the model
size, since two more phenomena related to centrifuge testing can, in
principle, cause the behaviour of the model to be appreciably different
from that of the prototype of an identical soil. These two phenomena are
associated with (a) the particle size and (5) the rotational acceleration field.
It has been established previously (refer to equation 13.3) that the stress
similarity necessitates the use of a model with dimensions N times smaller
than the prototype, with Ng being the acceleration to which the model is
subjected in the centrifuge. Moreover, an equivalent dimensional analysis
indicates that, for the same soil, the ratio d/L (d being the average grain
size of the soil, and Z a typical boundary dimension) must, in theory, be
identical for both the prototype and the model, so that:
dn _ dp
Lm Ep
Substituting for the length Ln,
is seen that:
d,
am =
hm from equation 13.3, and rearranging, it
(13.12)
SCALE EFFECTS 697
Equation 13.12 therefore indicates the need to use a model comprising a
soil with an average grain size N-times smaller than that of the same soil
used for the prototype. Manifestly, this conclusion has, in practice, the
potential of generating problems since, for instance, a model tested at an
acceleration of 100g, constituted of fine sand that has in the field an
average grain size of dy =0.1mm, must have an average grain size of
dy/100 = 0.001 mm which, according to table 1.1 of section 1.2
corresponds to a clay, with all the implications related to the void ratio,
permeability and stress-strain behaviour.
Although no simple answer can be provided as to how the grain size might
affect in any appreciable way the behaviour observed during a centrifuge
test (see for example Ovesen (1979), Bolton and Lau (1988), Tatsuoka et
al. (1991)), it seems logical, though, that the grain size effect decays with
decreasing grain dimensions, so that while it appears necessary to reduce
the grain size in proportion to the centrifuge acceleration when testing a
gravel, the adverse effects of not doing so when testing a fine sand, a silt or
a clay appear to be minimal. Evidently, these effects need be (or are
already in the process of being) investigated thoroughly, and thus an
engineering judgement has to be made in conjunction with the soil used for
a model and the type of problem to be physically simulated. Therefore
some caution must be exercised, so that the above analysis and guidelines
are not used in a mechanical way.
Let us now establish the effects of the rotational acceleration field, better
known as the Coriolis effects. In this respect, it is easier to establish all
acceleration components related to a soil element, rotated at a steady
velocity V, much in the way that a model contained in a centrifuge basket
is subjected to an acceleration Ng. Thus, with reference to figure 13.5, it is
seen that the radial co-ordinates of point A, a distance r far from the centre
of rotation, are as follows:
X=rcos0
(13.13)
Y=r sin@
The components of velocity are therefore:
698 CENTRIFUGE MODELLING OF SOIL BEHAVIOUR
aK tt nsing®
Vy = 4 = cos 00 —rsin8 7,
= < ging Eo
Vy = 9, = sin0F +rcos07,
whence the following accelerations:
de dt dt
#Y _ ing ft ad ea
ae in Ora ip + 200800 a mt +rcosOTy
2
7 ad
ex = cos 0 Pr 2 sin 9x2 —rsino#2 — rcos0(®)
-rsin (2) ,
Figure 13.5: Radial co-ordinate system.
(13.14)
(13.15)
Moreover, when the local co-ordinates system (x, y) is used, then with
reference to figure 13.6, the position of A is such that:
x=C
y=Cr-r
where C and C2 are constants.
(13.16)
SCALE EFFECTS 699
Figure 13.6: Local co-ordinate system.
Referring to figure 13.6, it is seen that:
hy =r cos@sin® =X sind
hy =h, = Ycos0
&; =X cos0
&) =Ysin0
and
r=€i+&2
Accordingly, equations 13.16 can now be expressed as follows:
x=Ci-hyt+hy
y=C2-E1-&2
and so, inserting for the quantities h), hy, &; and &, it follows that:
x=C;-X sin@+Ycos6
(13.17)
y=C2-X cos0—Y sind
700 CENTRIFUGE MODELLING OF SOIL BEHAVIOUR
The accelerations, expressed in the local co-ordinates system can then be
derived:
@&: &X
aoe (2) sino +(“) cose
e
ae (2) cos0- (& ¥) sine
Thus, substituting for the quantities derived in equation 13.15 and
rearranging:
a dt dt dt
fy _ dr (#)’
ae ae "Na
Equations 13.18 yield the four components of acceleration:
74 , 20
(13.18)
: A &0
- the horizontal shaking: T,= ie
2.
- the vertical shaking: v= ar
dt
2 2
- the inertial acceleration: Tj=r (®) =ors £
where @ is the angular velocity
Te =e
- the Coriolis acceleration:
dt dt
It is noticeable that the first two components [, and Ty only apply to
dynamic models (to simulate quakes for instance). Also, the Coriolis
acceleration I’. which translates the velocity v = dr/dt of a particle within
the model, relative to the velocity of the model centrifuge in flight
= rd0/dt, can be rewritten as follows:
Te =2v@ =2v¥ (13.19)
SCALING LAWS 701
In practice, it is accepted that, for slow moving particles, in other words for
a steady model flight where no shaking takes place, the error due to
Coriolis acceleration is negligible for ratios ',/T'; < 0.1, meaning:
v<0.05V (13.20)
However, for faster particles, the path of a moving particle within a model
becomes curved, with a radius of curvature r- defined as follows:
2
rear (13.21)
Substituting for ', from equation 13.19, it is seen that:
xis
v
= ap (13.22)
Since r represents the effective radius of centrifuge (refer to figure 13.5),
equation 13.22 implies that the curvature effect becomes less significant
when r, >r. Accordingly, it is suggested that for fast particles (such as in a
blast simulation for instance), the errors related to Coriolis acceleration are
no longer appreciable as long as the velocities in equation 13.22 are such
that:
v>2V (13.23)
Thus, both equations 13.20 and 13.23 yield the range within which Coriolis
effects must be taken into account:
0.05VT-') in a model is N? times
smaller than that occurring in the prototype.
Diffusion problems
The governing parabolic equation of a consolidation process (ie.
porewater pressure dissipation with time) can be written as:
2.
otaaet (13.37
The solution to the above equation contains the following time factor
written in the case of the centrifuge model as follows:
2
m
1
Ty = 0,4 (13.38)
di;
SCALING LAWS 705
where L represents the drainage path and 1 is the time, the coefficient of
consolidation c, being identical for both prototype and model. Substituting
for tem and Lm from equations 13.32 and 13.25 respectively, then
cancelling appropriate terms:
1
ton = stp (13.39)
This equation, being identical to equation 13.32 in the case of seepage,
indicates that the same stage of consolidation occurs N? times faster in a
centrifuge model than in a prototype.
Reynolds number
The Reynolds number is of particular interest in centrifuge modelling,
because its value is linked to the flow regime. It is well established that for
soils, the regime of flow is assumed /aminar as long as the Reynolds
number is kept smaller than 10 (refer to section 3.1). Let us examine the
effect that this condition has on the centrifuge model. The dimensionless
Reynolds number corresponding to the centrifuge model is defined as:
Rem = md (13.40)
where vm represents the model seepage velocity, d is the average diameter
of soil particles and 1 is the kinematic viscosity of water. Since d and pare
identical for both prototype and centrifuge model, equation 13.40 can then
be rearranged after introducing the scaling law for seepage velocities from
equation 13.30:
Rem = vp = NRep (13.41)
which implies that the Reynolds number is N times higher in a centrifuge
model than in a prototype. Consequently, in order to maintain a /aminar
regime of flow in the model, provisions must be made to keep the Reynolds
number smaller than 10.
It is of interest to note that, according to equation 13.41, an identical
Reynolds number for both model and prototype can be achieved by using
706 CENTRIFUGE MODELLING OF SOIL BEHAVIOUR
for the centrifuge model: (a) a soil characterised by an average grain
diameter that is NV times smaller than the average diameter in the prototype
or (6) a fluid N times more viscous than water. Clearly the first suggestion
is unworkable, however, a variety of oils with differing viscosities can be
used as a pore fluid in the model instead of water. One has to bear in mind,
though, that the use of a pore fluid other than water may cause the surface
properties of the solid particles to change, which may, in turn, affect the
behaviour of the model.
13.
Dynamic models
Dynamic events such as quakes can be simulated in a centrifuge, and the
scaling laws related to the corresponding models are derived in a manner
similar to that used in conjunction with static models. Figure 13.7 depicts a
typical horizontal shear wave generated by an earthquake, which is
represented by the following differential equation:
x= asinot (13.42)
where x represents the cyclic motion, a is the amplitude of the motion, and
@ corresponds to the angular velocity. Obviously, both velocity and
acceleration can be derived from equation 13.42:
& =awcos@t (13.43)
£x — _aesinwt (13.44)
a
As the quantity am? in equation 13.44 defines the magnitude of
acceleration, and because the centrifuge model is subjected to an
acceleration N-times larger than that of the prototype, it is clear that:
2 2
AmOm = Nap®p (13.45)
also, according to equation 13.25:
am = 5 (13.46)
SCALING LAWS 707
Thus inserting am into equation 13.45, and rearranging, it is easy to
establish that:
@m = Nop (13.47)
and because the angular velocity is related to the motion frequency, it
follows that:
o=2nf > fn=Nfp (13.48)
More importantly perhaps, the quantity aw in equation 13.43, which
corresponds to the magnitude of velocity, is identical for both model and
prototype. In fact, substituting for am and @m from equations 13.46 and
13.47 respectively into equation 13.43, it is seen that:
Am®m COS(Wmt) = Ap @p COS (Np f) (13.49)
Because the velocity magnitude corresponds to the ratio of a length to a
time, and knowing that in a centrifuge model the length is reduced by a
factor N (see equation 13.25), equation 13.49 therefore implies that the
time for dynamic models is reduced by a factor N as opposed to a factor
N* for seepage or diffusion problems (refer to equations 13.31 and 13.39).
t
os
a
Figure 13.7: Vertically propagating shear wave.
Example 13.1
A model with a volume V,=3 x 107m} is subjected to 10 cycles at a
frequency fm =100Hz and with an amliptude a» = 1.5mm, while being
708 CENTRIFUGE MODELLING OF SOIL BEHAVIOUR
accelerated in a centrifuge at 100g. Obviously, the duration of shaking is
calculated in a straightforward way: tm = 10/100 = 0.1s.
The magnitude of acceleration due to the shaking can be estimated as
follows:
mm = Am(2fm)” = 1.5 x 103 x 4? x 104
= 592 mis? = 60.3¢
This test simulates an earthquake in a prototype, having a volume:
Vp =N? Vm = 30, 000m?
subjected to 10 cycles at a frequency: fp = ta =1Hz, and with an
amplitude: ay = Nam = 0.15 m. §
g
The duration of the earthquake is such
that: ¢) = Ntm = 10s, and the magnitude
of acceleration in the prototype is, with
reference to figure 13.8:
Figure 13.8: Earthquake
accelerations.
ay(2nfy)” = 0.15 x 4n? x 1 = 5.92 mis? = 0.6g
Assuming that, during the shaking, the steady centrifuge velocity is
V = 30 mis, then the error due to Coriolis acceleration at maximum velocity
of shaking, corresponding to the ratio of the inertial acceleration I, = V2/r
to the Coriolis acceleration, =2vV/r is estimated as follows:
V=Am2M fm = 1.5 x 20 x 107! = 0.94 mis
whence:
2x0.94
30
et
Sle
=2v es
=F 0.062
SCALING LAWS
709
Obviously, in this case, the error due to Coriolis acceleration is only 6.2%,
and is therefore negligible.
The scaling laws for different physical quantities are summarised in the
following table in the case of a model subject to an acceleration N.g.
quantity scaling law scaling factor
acceleration gn =Ngp Nn!
mass, density Pm =Pp 1
stress om =Op 1
strain Em =Ep 1
velocity Vin =Vp 1
temperature Om =O, 1
length Lm =L,/N N
time (static event) tm = tp/N? N?
time (dynamic event) tm = tp/N N
displacement, amplitude dm =dyI/N N
unit weight Ym =p Nt
Srequency fm =Nfp No
hydraulic gradient im =Nip Nt
seepage velocity Vm =Nvp No
Reynolds number Rem =NRep N!
heat flux hum =Nhy Nt
seepage flow per unit length |qy = qp/N? N?
total seepage flow Qn — =Qp/NP Ni
diffusion (consolidation) ton = tep/N? N?
heat transfer(conduction, (60/2t),, = (8/61) ,/N? N
convection)
710 CENTRIFUGE MODELLING OF SOIL BEHAVIOUR
13.5 Practical aspects of centrifuge modelling
Every engineer or researcher would recognise that the outcome of a
centrifuge test in geotechnics depends on the meticulous model preparation
prior to testing, which is, alas, time consuming. In this respect, the paper
by Phillips (1995) constitutes excellent reading as it describes in some
detail the potential pitfalls related to model preparation, testing and
monitoring.
The one aspect that must always be considered first in relation to
centrifuge testing is safety, Centrifuges such as the one depicted in figure
13.1 are powerful machines that must be handled by adequately trained
staff. Furthermore, centrifuge testing is unquestionably a multi-disciplinary
activity, since the modeller has to be at least conversant in (if not
knowledgeable about!) mechanical engineering, electronics equipment,
control systems and data acquisition, before even contemplating
interpreting the test results from a geotechnical viewpoint. No wonder that
such tests are generally intensively resourced, therefore expensive and time
consuming.
Manifestly, undertaking a centrifuge test implies spending the majority of
time and effort on the careful preparation of the model. This includes the
following.
- The selection of the appropriate container depending on the type
of soil tested and the type of behaviour to be simulated (static or
dynamic) with specific boundary conditions requirements that
need to be fulfilled. For instance, modelling a static event such as
the consolidation of a clay layer requires the walls of the container
to be ideally frictionless, whereas the simulation of the creep
behaviour of a frozen soil necessitates a strict thermal control
within the container.
~ The selection of the appropriate soil conditions for the model, in
particular, the restrictions related to the flow of pore fluid and the
size of the model must always be taken into account.
It was established earlier that the Reynolds number in the model
must be kept below 10 for laminar flow conditions to prevail.
PRACTICAL ASPECTS OF CENTRIFUGE MODELLING 711
This requirement is most likely to be fulfilled through the use of
a pore fluid that is N times more viscous than water in conjunction
with the model (Ng being the acceleration to which the model is
subjected). Also, in order to minimise the scaling errors due to
inertial forces (refer to figures 13.3 and 13.4), the model height
must be kept to within one-tenth of the effective centrifuge radius
(measured from the centre of rotation to one-third the model
depth). On the other hand, the model may have to be protected
against any temperature changes or any air movements that can
potentially be generated within the aerodynamic enclosure (see
figure 13.1) during testing.
- The reconstitution of the model under laboratory conditions must
allow for the effective stress profile to be recreated in the case of
cohesive soils, or for the change in soil behaviour to be taken into
account when interpreting test results. In particular, remoulded
samples of clay and silt can be created from a slurry by tamping.
Alternatively, the slurry can be consolidated in the centrifuge, in
which case, care must be taken not to induce a differential
consolidation of the slurry mass through the generation of
preferential drainage paths due to the high pore pressure within the
soil mass (refer to section 5.6). For granular soils, sophisticated
techniques such as tamping and pluviation can be used to create a
density controlled model.
- Instrumentation and actuation of the model can potentially create
problems since neither the instruments, nor the actuator are scaled.
Pore pressure, total stress and displacement transducers, as well as
thermocouples, that are buried within the model should be placed
in a way that minimises any reinforcement effect of the soil. Also,
there is a need to insulate strain gauges and lead wires embedded
in the model. The restrictive effects on the model behaviour of the
actuator (i.e. the system that sets off the model to simulate the
behaviour of the prototype) must be reduced to a minimum.
- A data acquisition system that can store a large amount of data in
a short period of time is needed to conduct a centrifuge test
successfully. In this respect, sophisticated systems combining the
latest electronics and digital technologies are commercially
712 CENTRIFUGE MODELLING OF SOIL BEHAVIOUR
available.
These points, important though they may be, are only an apercu of the
acumen, hard work, and vision required by a modeller to conduct a
sophisticated and technically challenging test such as a geotechnical
centrifuge test. A thorough analysis which tackles more detailed practical
aspects of centrifuge modelling can be found in Phillips (1995).
References
Bolton, M. D. and Lau, C. K. (1988) Scale Effects Arising from Particle Size.
Centrifuge 88 (ed. J. F. Corté). A.A. Balkema, Rotterdam, pp. 127-134.
Corté, J. F. (Ed.) (1988) Centrifuge 88. A.A. Balkema, Rotterdam.
Ovesen, N. K. (1979) The scaling law relationship. Panel discussion.
Proceeding of the 7th European conference on Soil Mechanics
and Foundation Engineering, Brighton, 4, pp. 319-323.
Phillips, R. (1995) Centrifuge modelling: practical considerations.
Geotechnical Centrifuge Technology, Blackie, London, pp. 34-60.
Schofield, A. N. (1980) Cambridge geotechnical centrifuge operations.
Géotechnique, 20, pp. 227-268.
Tatsuoka, F., Okahara, M., Tanaka, T., Tani, K., Morimoto, T. and Siddiquee,
M.S. A. (1991) Progressive failure and particle size effect in bearing
capacity of a footing in sand, ASCE Geotechnical Engineering Congress,
Vol. 2 (Geotechnical special publication 27), pp. 788-802.
Taylor, R. N. (1995) Centrifuges in modelling: principles and scale effects.
Geotechnical Centrifuge Technology, Blackie, London, pp. 19-33.
CHAPTER 14
Finite element modelling in geotechnics
14.1 Finite element modelling
This section aims at presenting the numerical modelling used in
conjunction with geotechnical problems from a practical perspective. As
such, it is not intended to develop in detail the mathematical formalisms of
the finite element method, although its working will be explained
succinctly. A thorough presentation of such a method of analysis is widely
available, and reference should be made to Zienkiewicz and Taylor (1991),
Bathe (1982, 1996), Hughes (1987), Stasa (1985), Griffiths and Smith
(1991), Smith and Griffiths (1998), Reddy (1993) and Owen and Hinton
(1980).
The finite element method is one of the most powerful approximate
solution method that can be applied to solve a wide range of problems
represented by ordinary or partial differential equations. The power of such
a method derives from the fact that it can easily accommodate changes in
the material stiffness which is evaluated at element level as will be
explained shortly. Also, it allows for different boundary conditions to be
applied in such a way that an acceptable global approximate solution to
the physical problem can be achieved. Considering that closed form
solutions cannot be elaborated for a large number of complex physical
problems, due to the impossibility of satisfying the boundary conditions
related to the corresponding equilibrium equations, the finite element
method therefore provides an ideal alternative (approximate) solution
method.
In its simplest form, the finite element method consists of:
- dividing a given structure or domain into a number of elements
(hence the name finite elements); this process is known as
discretisation. Elements are connected by nodes at the corners and
sometimes at the sides as well;
714 FINITE ELEMENT MODELLING IN GEOTECHNICS
- modelling the behaviour of the unknown variables at different
nodes through the use of appropriate interpolation polynomials,
better known as shape functions.
The shape, size, number and type of elements depend on the type of
structure or domain, and also on the precision required in the solution,
these points being further elaborated below.
In all cases, finite element modelling invariably leads to a matrix
formulation that depends on the nature of the physical problem to be
solved. Hence, steady-state problems (i.e. problems for which the unknown
variables are independent of time) always consist of solving (numerically)
the following matrix relationship:
[K]{U} ={F} (14.1)
where [K] represents the global stiffness matrix (that includes the material
properties), {U} is the vector of nodal unknown variables (for instance
displacement or water pressure), and {F} corresponds to the vector of
applied nodal loads.
Based on the two basic principles stated above, a finite element procedure
consists of the following steps:
(a) discretisation and selection of elements;
(b) selection of the stress-strain relationships;
(c) evaluation of element matrices;
(d) assembly of elements matrices and introduction of boundary
conditions;
(e) solution to nodal unknowns;
(f) computation of derived quantities, and analysis of results.
(a) Discretisation and elements selection
The elements used in conjunction with any discretisation process are
selected with the view to obtaining sufficiently precise values of the nodal
unknowns. Their shape and type depend therefore on the complexity of
the boundaries of the discretised domain, and on the complexity of the
FINITE ELEMENT MODELLING 715
physical behaviour to be modelled. In this respect, figure 14.1 illustrates
the deformed shape of various one-, two-, and three-dimensional elements,
each characterised by the number of nodes it contains. It is useful to
mention at this stage that the number of variables at each node defines the
number of degrees of freedom per node which are not necessarily identical
for all nodes of every element in the mesh. Also, elements for which the
same shape functions are used to define the unknown variable and the
geometry of the element (i.e. its edges) are known as isoparametric
elements.
The (deformed) shapes are related to the type of the shape functions. Thus,
linear elements are such that the unknowns vary linearly between any two
connected nodes. The edges of a quadratic element, on the other hand, are
curved since the corresponding shape functions consist of second-order
polynomials. Cubic elements are generated using third-order polynomials.
While the list of elements depicted in the figure is by no means exhaustive,
it contains, however, some of the most widely used elements in finite
element modelling in geotechnics. Thus, the three-noded triangle (element
4 in the figure) is the simplest two-dimensional element. Because of its
associated linear shape functions, the strains (and consequently the
stresses) are constant within the element. For that reason, the element is
usually referred to as the constant strain triangle (CST). Although the CST
is very easy to program, its use is limited to problems which do not involve
the derivatives of the nodal variables such as computational fluid dynamics
and seepage applications. Similarly, the same limitations apply to the
four-noded quadrangle (element 7 in figure 14.1).
For these reasons, the six-noded triangle and the eight-noded quadrangle
(quadratic elements 5 and 8 respectively) are the two-dimensional
isoparametric elements par excellence, although their performance
depends on the integration rule used (see section 14.3). Also, the 15-noded
quadratic (cubic strain) triangle (element 6 with an extra node on each side
and three extra interior nodes, figure 14.1) is another quite widely used
element which is now incorporated in many finite element packages.
716 FINITE ELEMENT MODELLING IN GEOTECHNICS
LINEAR | QUADRATIC. | | CUBIC
ELEMENTS | ELEMENTS —|_ ELEMENTS
2nodes Fnodes dnodes
1 / Z . rj
3 nodes | _ | 6 nodes
4 nodes
4 nodes 10 nodes Te nodes
D \A\
8 nodes
Figure 14.1: Selective types of elements.
FINITE ELEMENT MODELLING 717
These elements are particularly suitable for modelling plane strain and
axisymmetric problems. Moreover, the quadratic nature of the associated
shape functions makes it possible for domains with curved edges to be
discretised in a precise way without the use of an excessive number of
elements. It is perhaps worth mentioning that the shape functions
associated with the eight-noded quadrangle are based on incomplete
second-order polynomials (the straightforward mathematical details can be
found in any book on finite elements) and, accordingly, the element is
often referred to (in the jargon of finite elements) as a serendipity
quadrangle.
When it comes to three-dimensional modelling in geotechnics, the two
most widely used elements are the ten-noded tetrahedron and the
twenty-noded serendipity hexahedron (elements 11 and 14 in figure 14.1).
These quadratic 3-D elements can be used successfully to estimate the
displacement and stress fields. It must be borne in mind that the coding of
mesh generation and output facilities for 3-D finite element analysis can be
very complex. Accordingly, 3-D finite element modelling must only be
used when neither plane strain nor axisymmetric conditions are suitable, or
when the type of project justifies the cost of such a modelling (the case of
the simulation of stresses and settlements beneath the foundation of a
nuclear power plant for instance).
It should be remembered that a finite element mesh consists generally of a
combination of different types of compatible elements (i.e. nodes common
to two elements must have the same degrees of freedom, and their shape
functions must be characterised by polynomials of the same order). This
might involve the use of transitional elements characterised by different
shape functions on one side (to ensure a correct transition between
elements) as illustrated in figure 14.2. More importantly, finite element
modelling of soil structure interaction problems (examples include
retaining, diaphragm or sheet-pile walls, laterally loaded piles, tunnels)
may necessitate the use of interface elements to simulate the friction at the
soil-structure interface (refer to figure 14.2).
718 FINITE ELEMENT MODELLING IN GEOTECHNICS
common nodes
quadratic element
1-D quadratic element
(interface element)
transitional
element (variable nodes)
Figure 14.2: Use of transitional and interface elements.
(b) Selection of constitutive laws
The predictions based on the outcome of a finite element modelling depend
to a large extent on how realistic is the stress—strain relationship used in
the calculations. It is a fact that most engineers prefer to use simple linear
relationships, and in some cases related to homogeneous isotropic soils,
such assumptions can be justified. However, for more complex soil
conditions corresponding to layered soils with different stiffness
characteristics, the assumption of a unique stress-strain relationship, let
alone a linear one, can be markedly erroneous. It is essential to realise that
finite element modelling, with a however refined mesh and sophisticated
elements, will not per se offset any shortcomings related to the use of
inappropriate stiffness parameters (that is stress-strain relationships), and
as such, it cannot be emphasised enough that the numerical analyst must
have a good feel, if not a good grasp, of soil behaviour prior to embarking
on expensive numerical modelling. Non-linear stress-strain relationships
usually lead to iterative procedures in computation, increasing noticeably
the cost of calculations. Such cost must therefore be justified at least in
terms of obtaining reliable predictions of stresses and deformations.
(c) Evaluation of element matrices
In finite element modelling, element matrices are first formulated in terms
of local co-ordinates, so that for each element in the mesh, the element
FINITE ELEMENT MODELLING 719
stiffness matrix and vector of nodal forces are established using an integral
method such as the Galerkin weighted-residual method, for instance, thus
yielding:
t= iol
: (14.2)
try= [wendy
[By being the transpose of the matrix [B] which is derived from the
shape functions [NV], and [D] corresponds to the matrix of soil properties
relating stresses and strains (refer to Hughes (1987), for example).
The numerical integration of the element stiffness matrix is usually
undertaken using the Gauss quadrature method, whose power is such that
the integral in equation 14.2 needs only be evaluated at a few specific
points known as Gauss integration points. It can be shown that using
points of integration in each direction of the space, this method can
integrate exactly up to a (2n—1)-order polynomial. For instance, it can
readily be shown that in the case of the eight-noded serendipity quadrangle
(clement 8 in figure 14.2), the integrand [B]’[D][B] in equation 14.2 is of
the fourth order. Were the stiffness matrix for this element to be evaluated
using nine integration points (that is 3 x3 so that m =3), an exact solution
will be achieved since the use of n? =9 integration points can integrate
exactly up to a fifth order polynomial (2n- 1 = 5).
(d) Assembly of elements matrices and introduction
of boundary conditions
Once all elements' stiffness matrices are evaluated in local co-ordinates, a
global stiffness matrix is then determined by first expanding each element
matrix so that it is expressed in terms of all nodal variables of the entire
mesh, then summing all matrices in a straightforward manner, yielding in
the process the now familiar equation 14.1:
[K]{U} = {F}
720 FINITE ELEMENT MODELLING IN GEOTECHNICS,
in which the vector {U} contains all nodal variables (or degrees of
freedom), and {F} represents the (expanded) vector containing all nodal
forces.
The boundary conditions in terms of nodal forces are inserted into the
global vector {F'} in a straightforward way. However, a prescribed nodal
displacement can be introduced in many ways. For example, were the
displacement at node i to be prescribed at u; =5, then such a boundary
condition can be satisfied if the diagonal coefficient in the stiffness matrix
Kj; corresponding to node i is replaced by a large number (= 10° for
example) and the quantity M8 is substituted for the nodal force F;.
Notice that the global stiffness matrix is (usually) symmetric and has a
dimension of (mx m) where m represents the total number of degrees of
freedom contained in the entire mesh. For example a somewhat complex
2-D mesh for a tunnel having, say, 5000 nodes (which is not unusual) with
only 2 degrees of freedom per node, yields a global stiffness matrix with a
dimension of (10,000 x 10,000) = 108. Storing such a colossal matrix in
its entirety would undoubtedly cause few problems; fortunately, only a few
of the 100 million coefficients in this case are non-zero. What is more, the
non-zero coefficients are situated in and around the diagonal of the matrix,
thus forming a band. It is only the width of this band that is of interest,
because its storage is done according to a dynamic allocation of space that
allows the corresponding coefficients (which may include zeros) to be
stored in lines so that they are easily retrieved when required. This method
is known as the skyline storage method, the details of which can be found
in Zienkiewicz and Taylor (1991), for instance.
(e) Solution to nodal unknowns
This step consists of calculating the vector of nodal unknowns {U} from
the global equation:
[K]{U} ={F}
The obvious solution is to invert the stiffness matrix [K], so that:
{U} =[K]'[F]. However, given the large size of [K], its inversion is not
practical. A more effective solution consists of applying the triangular
FINITE ELEMENT MODELLING 721
decomposition method in conjunction with the stiffness matrix, then using
the forward elimination and back-substitution method to calculate the
unknown nodal variables. Based on the Gaussian elimination method, it
can be shown that, provided [K] is not singular (i.e. its determinant in not
zero), it can always be written as the product of two matrices:
[K]=[Z][S] (14.3)
where [L] is a lower triangular matrix in which the diagonal coefficients
are unity, and [S] is an upper triangular matrix, so that for example:
2 4 8 100]24 8
4 11 25 |=|2 10/039
6 18 46 3.2 1]0 04
[kK] = [] [s]
Thus, substituting for [K] into the global relationship yields:
[LIES 1{U} = fF} (14.4)
which can then be solved in a very easy way using the forward elimination
and back-substitution method (see Jennings and McKeown (1992),
Hoffman (1992)) which consists of the following stages:
- stage I: factorize [K]:
[K]=[Z IIS] (14.5a)
- stage 2: use a forward substitution to solve for {Z}:
[L]{Z} = {F} (14.56)
- stage 3: use a back-substitution to solve for {U}:
[S]{U} = {Z} (14.5¢)
Notice that {Z} in equations 14.5 represents a vector of intermediate
variables.
722 FINITE ELEMENT MODELLING IN GEOTECHNICS
Such a method of solution, however, may quickly become unsuitable for
3-D finite element analyses, both on grounds of storage capacity and the
number of calculations. Under such circumstances, iterative solvers such
as the one based on the pre-conditioned conjugate gradient method (see
Jennings and McKeown (1992)) can be very useful in terms of efficiency
and precision.
(f) Calculation of derived quantities and analysis of results
Once the primary unknowns in equation 14.4 are determined, the gradients
or derived quantities can then be established. For instance, the strains are
derived from displacements, and the stresses are calculated from the
stress-strain constitutive relationships.
Perhaps the most important step in a finite element modelling consists of
analysing the outcome of computation. Once more, it is worth reiterating
that the finite element method is only a method of solution and, as such, it
cannot make for any deficiency related to soil stiffness parameters used in
the calculations. It is naive to consider a result acceptable simply by virtue
of the fact that it was generated through a finite element modelling. The
engineer must be in a position to question the very raison d’étre of such a
modelling in the first place. Is it needed ? If yes, then how can one get a
reliable set of soil parameters (preferably measured in situ so as to
minimise the effects of disturbance). Furthermore, it is essential that the
soil-structure interaction mechanisms are well understood before
embarking on time consuming expensive numerical modelling. It is also
helpful if the working of the finite element method is understood, so that
when it comes to the interpretation of results, any aberration can be
attributed to its appropriate cause(s). In this respect, the following section
contains some practical analyses related to the potential pitfalls of finite
element modelling.
14.2 Effective stress analysis
Thus far, the term stress has been used indiscriminately. However, there is
often a need during a finite element analysis of geotechnical problems, to
dissociate (numerically) effective stresses from porewater pressures
EFFECTIVE STRESS ANALYSIS 723
according to the effective stress principle (an important aspect in
geotechnics). Although the specific details of such an analysis is beyond
the scope of the present text (reference can be made to Naylor (1974) for
example), it is worth mentioning that an effective stress formulation can
easily be incorporated in a finite element program. The procedure consists
of using an expanded matrix of soil properties relating stresses and strains
(matrix [D ] in equation 14.2) in the following manner (see Naylor et al.
(1981):
[D] = [D']+ [abn]? [Ky] (14.6a)
{o} = {o/} + [m] {u} (14.65)
where [m]” represents the transpose of the column matrix related to the
effective stress principle, [D’] is the soil skeleton modulus matrix, and
[Ky] corresponds to the bulk modulus of the pore fluid element. Note that
all coefficients corresponding to shear stress components in [m] are zero,
the remaining coefficients being equal to 1.
All calculations involving element matrices, assembly and solution to the
global system of equations thus formed are then undertaken as described
previously. Once the strains are calculated, the ensuing stress increments
are then evaluated using the following relationships:
{Ao’} = [D/]f{Ae} (14.7a)
{Au} = [Ky] {Aev} (14.76)
{Au} being the excess (i.e. load induced) porewater pressure, and {Aey}
represents the volumetric strain change.
Notice that a drained analysis amounts to setting [Ky] to zero. More
importantly, the effective stress analysis presented above does not apply to
transient flow problems (i.e. consolidation problems).
Also, it should be mentioned that the critical state model presented in
chapter 6 can be (and is often) successfully coupled to finite element
programs. In this respect, reference should be made to Britto and Gunn
(1986) and Naylor et al. (1981).
724 FINITE ELEMENT MODELLING IN GEOTECHNICS
14.3 Finite element modelling of seepage and consolidation problems
Although seepage problems are steady state problems, their finite element
solution is nonetheless elaborated in a slightly different way from the one
developed earlier, since pressure heads are the corresponding primary
unknowns.
Seepage problems are represented by an elliptic equation, the two-
dimensional form of which has been established earlier (see equation 3.47,
section 3.4):
=0 (14.8)
where ky and ky are the coefficients of soil permeability and 4 corresponds
to the total head. Notice that for ky # ky, equation 14.8 is not a Laplace
equation.
Whilst developing a closed form solution to such an equation can be
fraught with difficulties, mainly because in many cases of flow, the
corresponding boundary conditions are very difficult to satisfy, the finite
element method can be applied in a straightforward manner.
It can be shown that, irrespective of the nature of flow (i.e. confined or
unconfined), the discretisation of equation 14.8 invariably yields a global
relationship:
[K]{A} = {Q} (14.9)
which is a familiar matrix relationship, since it is similar to equation 14.1.
Here {/} is the vector of nodal variables, which in this case correspond to
the total heads, and {Q} is the vector of nodal flow. It is interesting to
mention that solving for total heads implies that each node has only one
degree of freedom, in other words there is only one unknown quantity at
each node.
The global stiffness matrix [K] in equation 14.9 is obtained from the
assembly of element matrices, each of which is calculated as follows:
FINITE ELEMENT MODELLING: SEEPAGE AND CONSOLIDATION 725
[K]’= [ (By'tP IIB] av (14.10)
where [B]’ corresponds to the transpose of matrix [B] which is derived
from the shape functions, and [P] is the element permeability matrix
(Naylor et al., 1981):
ri-| § c| (14.11)
Notice the diagonal nature of [P ].
The numerical solution to equation 14.9 depends on the boundary
conditions and therefore on the nature of seepage. Thus, in the case of
confined flow as illustrated in figure 14.3 (refer also to section 3.4 for
more details related to this type of flow), the corresponding boundary
conditions are:
- along AB: H=h, +d,
-alongCD: H=hy+d
aH.
- along EF: ape 0 (impermeable side)
Figure 14.3: Boundary conditions related to confined flow.
726 FINITE ELEMENT MODELLING IN GEOTECHNICS
For unconfined flow, on the other hand (see figure 14.4), the boundary
conditions are:
- along AB: H=h,
-along BC: H=y and u=0 (u being the porewater pressure,
tefer to section 3.4)
- along AC: = =0 (impermeable side)
in both cases, H is the total head expressed with respect to the datum
represented by the impermeable base.
The free surface in the case of unconfined flow presents an additional
problem as its location is not known a priori. The precise location can be
found using iterative techniques such as the one suggested by Smith and
Griffiths (1998), that consists of deforming the mesh until, eventually, its
upper surface coincides with the free surface characterised by the boundary
condition of a total head identical to the elevation head at any given point.
B
Figure 14.4: Boundary conditions related to unconfined flow.
Time-dependent problems such as consolidation are represented by a
parabolic equation (refer to the consolidation equation 4.14, section 4.3):
@u_ du
eve =a (14.12)
for which it can readily be shown that finite clement modelling yields the
following relationship:
te] 2] + Kw} =F} (14.13)
PRACTICAL ASPECTS OF FINITE ELEMENT MODELLING 727
where [C ] represents the matrix of soil consolidation characteristics. The
nodal variables {U} this time correspond to the porewater pressure; the
remaining symbols having the same meaning as in equation 14.1.
A solution to equation 14.13 can be obtained through a combination of
finite difference formulation (to discretise time) and finite elements.
Consequently, using a forward difference operator:
(22) = LE hgh] 14.14)
(At being the time increment), then inserting the latter quantity into
equation 14.13 and rearranging, the following algorithm can easily be
established:
Way = ater i},+(Licl-ta)tv},] a4)
which can then be solved on a step-by-step basis.
14.4 Practical aspects of finite element modelling in geotechnics
Finite element modelling of soil-structure interaction problems needs to be
planned and undertaken carefully, so that any anomalies in the results can
be spotted and remedied.
The first step consists of discretising the domain, in other words generating
a mesh. Although some finite element design programs contain
mesh-generation pre-processors, it must be remembered that a mesh should
always constitute a compromise between the computer capacity to store
data and execute calculations (this capacity can, in some cases, be
exceeded even by the standard of very powerful machines), and reasonable
predictions in terms of outcome such as strains, stresses, porewater
pressure etc.
Thus, a reasonable mesh should be refined (i.e. formed of smaller
elements) near any applied load where the stress and displacement
gradients are expected to be large, and around any geometric or material
discontinuities (or singularities to use a finite element jargon) such as
728 FINITE ELEMENT MODELLING IN GEOTECHNICS
tunnel openings or excavations. Also, the mesh needs to be refined around
the areas where changes in material properties occur, as in the case of
different soil layers, or around a soil-structure interface (pile-soil,
retaining structure-soil, tunnel-soil etc.). In such cases, interface elements
may be needed to simulate friction at the soil-structure interface,
particularly when the structure surface is relatively smooth.
Generally, the size of elements used in a mesh depends on the loading
conditions and geometric discontinuities stated above. However, numerical
evidence seems to indicate that the aspect ratio of an element (i.e. the ratio
of the Jargest to the smallest dimensions of an element) must be kept
within reasonable limits. In this respect, an aspect ratio smaller than 3
ensures satisfactory results in terms of stresses, unless the soil behaviour is
markedly non-linear, in which case an even smaller ratio is required. As far
as the shape of elements is concerned, and whenever practicable, triangles,
quadrangles and hexahedra used to generate a mesh should be as near as
possible to equilateral triangles, squares and cubes respectively, so as to
avoid any excessive distortion of these elements in the advent of large
displacements. Notice that some sophisticated finite element programs
offer the possibility of automatically regenerating the mesh while taking
into account the level of deformation of different elements.
The size of elements should be increased progressively around the refined
portions of the mesh in a way that ensures a smooth transition from small
to larger size elements. This can be achieved if the ratio of the areas (or
volumes in 3-D) of two adjacent elements does not exceed 2.
In any case, it is strongly advised (perhaps one should say it is logical) to
avoid using distorted elements such as the ones illustrated in figure 14.5
when generating a mesh. The reason being that, once loaded, each of these
elements can potentially deform to the point where the stiffness matrix
becomes singular (i.e. with a zero determinant, so that it cannot be
inverted) thus causing numerical instability. As a guideline, any angle a
within an element must be such that 15° < a < 165°. Also, the middle node
in a quadratic element should be situated within the middle third of the
side [see figure 14.5] (Zienkiewicz and Taylor, 1991).
Transitional elements (refer to figure 14.2 for the principle involved) are
mainly used in conjunction with 3-D modelling.
PRACTICAL ASPECTS OF FINITE ELEMENT MODELLING 729
Figure 14.5: Unacceptable elements.
The type of elements used in a finite element modelling depends on the
type of problem to be analysed. Nevertheless, one has to bear in mind that
the strains and stresses are derived from displacements and, as such, using
linear elements (ie. elements characterised by linear shape functions)
automatically yields constant strains and stresses within each element,
which can be markedly erroneous, particularly in relation to stress
distribution. Accordingly, the use of linear elements (refer to figure 14.1)
is not advised. Quadratic elements on the other hand, especially the
six-noded triangle and the eight-noded quadrangle, are widely used to
model different type of problems in geomechanics.
The calculation of strains and stresses is undertaken within each element at
specific integration points. Often, the integration points used to calculate
the strains (and hence the stresses) are fewer than those used to calculate
the element stiffness matrix. For example, whilst the stiffness matrix of the
eight-noded serendipity quadrangle is calculated using 3 x3 integration
points, numerical evidence shows that, in most cases, satisfactory results in
terms of displacements are obtained from a reduced integration using 2 x 2
integration points. In fact, in this case, an exact integration using 3 x3
points yields an over-stiff response, so underestimating displacements.
Situations might arise whereby a mechanism can occur as a result of a
730 FINITE ELEMENT MODELLING IN GEOTECHNICS
reduced integration using 2 x2 points; however, these cases are extreme.
As regards the six-noded triangle, a happy balance can be achieved using
three (non-Gauss) integration points. On the other hand the use of four
integration points in conjunction with the ten-noded tetrahedron (one of
the most widely used 3-D elements) provides satisfactory results in terms
of displacements. Interested readers can refer to the paper by Naylor
(1994) on integration rules.
Once calculated at the integration points, the stresses are then extrapolated
to the element nodes and, because each element has its own stiffness
matrix, the magnitude of stresses resulting from each element at a common
node such as the one depicted in figure 14.6 is generally different. This
stress discontinuity can be smoothed by taking the average value at the
node, so that the corresponding nodal stress results from the contribution
of all adjacent elements.
However, nodal averaging should not be used for stress and strain
calculations at nodes connecting elements with different stiffnesses (for
example elements corresponding to different soil layers). Such boundaries
are characterised by a stress discontinuity, except for the stress component
normal to the boundary. Numerical evidence shows that the stress field is
not affected by the stress discontinuity provided that a refined mesh with
smaller size elements around theses boundaries is used.
Figure 14.6; Stress calculation at a common node.
When using finite element modelling, special attention must be paid to the
degree and type of anisotropy of the soil-structure material. For example
the distribution with depth of the vertical stress generated by a uniform
surface load within a thick homogeneous isotropic soil layer is markedly
different in shape and in magnitude from that generated by the same load
within a layered anisotropic soil.
PRACTICAL ASPECTS OF A FINITE ELEMENT MESH 731
As mentioned earlier, geometric or material discontinuities constitute
singularities which are unavoidable for a large number of soil-structure
interaction problems. This can generate inaccurate stress fields near the
singularities (for example, an infinite stress beneath a point load is
computed as a finite quantity). However, these effects can be minimised by
using a refined mesh around the singularity, so that a right-angle boundary,
for instance, can be transformed into a smooth curved boundary.
14.5 Practical aspects of a finite element mesh related to foundations
A finite element mesh related to a given problem in geomechanics must
always take into account different aspects evoked previously and linked to
elements type and size, and particularly to the nature of the problem
(axisymmetry, anisotropy, drainage conditions, soil-structure interaction,
geometric singularities, and nature of loading). Consequently, the
following guidelines should be viewed with a sufficient degree of
flexibility, so that local conditions are appropriately considered. As such,
they should in no way be regarded as rules.
Based on the previous analysis, a finite element (axisymmetric) mesh in
the case of a shallow foundation on an isotropic homogeneous soil, with a
width B usually includes an area extending to about 5B laterally and 8B
vertically as illustrated in figure 14.7, an area within which most of the
stress variations are expected to occur (refer to figures 2.37-2.40, section
2.5).
The conditions imposed at the mesh edges in figure 14.7 allow for a
vertical movement (i.e. u=0) along the vertical boundaries, while
restricting any movement to u=v=0 at the bottom horizontal boundary,
where the stresses (and therefore the displacements) are expected to decay.
Also, notice how the mesh is refined beneath and around the foundation,
with increasing elements size as one moves away from the foundation in
each direction.
Were the soil conditions to be different as in the case, for example, of
ansiotropic multi-layered and partially submerged soils, then the overall
size of mesh as well as the size and type of elements would need to be
altered drastically so as to reflect the markedly different characteristics of
732 FINITE ELEMENT MODELLING IN GEOTECHNICS
the problem. Hence the informative nature of the dimensions indicated in
figure 14.7.
2 5B
[ae shallow foundation
u=0
~ 8B
u=v=0
Figure 14.7: Typical (axisymmetric) mesh dimensions for
anisolated shallow foundation on isotropic homogeneous soil.
For a deep pile foundation, the mesh depends on the type of loading and
the type of pile. Thus, for a single axially loaded pile with a length L
embedded in an isotropic homogeneous soil, the mesh should ideally cover
an area 3L-deep and about 30-pile diameters wide as depicted in figure
14.8. The typical (axisymmetric) mesh in the figure consists mainly of
eight-noded quadrangles and a few six-noded triangles. The size of the
elements reflects the stress distribution generated around the pile shaft and
tip depicted in figure 9.31 (refer to section 9.5). The boundary conditions
are of a similar type to the ones described previously in the case of shallow
foundations. However, in this case, there is a need to use interface
elements in order to simulate the friction developed along the pile shaft.
It is interesting to notice that the mesh in figure 14.8 is used to simulate the
behaviour of an already embedded pile. The numerical simulation of pile
PRACTICAL ASPECTS OF A FINITE ELEMENT MESH 733
driving is very complex in nature, not least because soil failure around the
pile shaft and tip has to occur every time the pile is struck with the driving
tool, so that it can be driven to the required depth, or sometimes until the
occurrence of a refusal.
Dye ~ 30d
w2L
Figure 14.8: Typical (axisymmetric) mesh dimensions for a single
axially loaded pile (isotropic homogeneous soil conditions).
A laterally loaded single pile, on the other hand, is characterised by a
markedly different behaviour. This type of loading occurs especially in
conjunction with bridges, flyovers and retaining structures founded on
piles, and can be applied either actively or passively as depicted in figure
14.9. In both cases, the solution in terms of displacement, bending
moment, shear stress and lateral pressure distribution with depth depends
on the soil-pile interaction, in other words on both soil and pile stiffness
characteristics.
The soil—pile interaction is depicted in figure 14.10 whereby the resistance
to the active load (a combination of a horizontal load and a bending
moment applied at the pile head) is provided by the pile stiffness and the
734 FINITE ELEMENT MODELLING IN GEOTECHNICS
soil reaction per unit length (that is, the force per unit length induced
within the soil mass by the active load).
active loading passive loading
He (Ty Me
Figure 14.9: Active and passive lateral loading of piles.
While the pile stiffness can be assumed to be constant along the pile shaft,
the soil stiffness, on the other hand, depends generally on the depth of
embedment. Figure 14.10 shows that at a given depth z, the relationship
between the soil reaction P and the lateral displacement y (i.e. the pile
deflection) is non-linear. Furthermore, the nature of the relationship varies
with depth.
Figure 14.10: Soil-structure interaction along the shaft of
an actively loaded single pile.
PRACTICAL ASPECTS OF A FINITE ELEMENT MESH 735
The profiles of pile deflection, bending moment and soil reaction are also
affected by the pile dimensions and the boundary conditions: a long
slender pile behaves in a different way from a short rigid pile as illustrated
in figures 14.11 and 14.12 in the case of actively loaded piles embedded in
an isotropic homogeneous sand. The figures also depict the difference in
behaviour between a free head and a fixed head pile.
Hy, 2 Mo
soil reaction bending moment
Figure 14.11: Profiles of deflection, soil reaction and bending moment
Sor a long pile in a cohesionless soil.
Hy . AES Mo
soil reaction bending
‘moment
Figure 14.12: Profiles of deflection, soil reaction and bending moment
for a short pile in a cohesionless soil.
Accordingly, a finite element mesh in the case of a laterally loaded pile
should reflect the soil, pile and loading conditions. Because of the nature
of the problem, no axisymmetry can be applied, and the mesh dimensions
indicated in figure 14.13 should be applied sensibly.
736 FINITE ELEMENT MODELLING IN GEOTECHNICS
Figure 14.13: Typical mesh dimensions for a single laterally
loaded pile (isotropic homogeneous soil conditions).
A pilegroup is much more difficult to model, especially in the absence of
axisymmetry (which is generally the case). The difficulties are further
illustrated by the fact that several modes of failure can potentially develop
(a single pile failure within the group, a row of piles failing at the same
time or a block failure en masse, refer to chapter 9). Under such
circumstances, a three-dimensional mesh might become a necessity, with
all the consequences elicited earlier concerning the potentially very large
size of global matrices. However, notwithstanding the somewhat high cost
that might be incurred in some cases, 3-D modelling of pilegroups is now
becoming an almost routine operation.
Whenever the 3-D problem can be reduced to an axisymmetric problem,
then a mesh such as the typical one depicted in figure 14.14 corresponding
to a pilegroup embedded in an isotropic soil can be used. The dimensions
of the area covered by the mesh extend to about 3Z in depth, and at least a
distance Z outside the pile situated at the group edge. Such a mesh should
reflect the stress distribution generated within the soil mass by a
pilegroup.
PRACTICAL ASPECTS OF A FINITE ELEMENT MESH 737
u=v=0
Figure 14.14: Typical (axisymmetric) mesh dimensions
‘for an axially loaded pilegroup in an isotropic soil.
14.6 Finite element mesh related to embankments,
retaining structures and tunnels
The finite element modelling of soil loading through an embankment with
a height H must be such that the mesh area covers most of the stress
increase generated within the soil mass. Also, the area must take into
account the possibility of a long term or a short term slope stability failure.
Accordingly, for an isotropic homogeneous soil layer, the 2-D mesh should
be characterised by a lateral dimension of at least four times the
embankment length, and a minimum depth of 5H or the depth of stiff
substratum, whichever is smaller (see figure 14.15). The mesh should be
refined in regions where the maximum stress generated by the loading is
expected, and the size of elements should be increased gradually as one
moves away from these regions. Note that were the depth of the stiff
substratum to apply, then the boundary condition «= v=0 indicated in the
figure would correspond to a relatively small change in stiffness between
the two layers. If the bottom layer were a rock, for example, overlain by a
soft clay, then the boundary condition should be changed to allow for a
lateral displacement, in which case v = 0.
738 FINITE ELEMENT MODELLING IN GEOTECHNICS
>3L
—
embankment
u=0
i
Figure 14.15: Typical mesh dimensions for an isotropic
homogeneous soil loaded through an embankment.
As regards a retaining wall with height H and base width L (see figure
14.16), the mesh should be wide enough to include not only the stress
changes in the soil mass beneath the wall, but also the potential
development of long term active and passive stress failures, as well as the
possibility of a deep circular failure. Consequently, for a wall retaining an
isotropic homogeneous soil, it is advised to use a mesh with a minimum
lateral dimension of 2H in front of the wall and 3H behind the wall,
depending on the type of soil. The mesh should extend a minimum depth
of 6Z or the depth of the stiff substratum, whichever is smaller as
illustrated in figure 14.16. Also, interface elements may have to be used if
the wall surface is relatively smooth.
The boundary condition related to the stiff substratum indicated in the
figure reflects the substantial change in stiffness between the two layers of
soil.
PRACTICAL ASPECTS OF A FINITE ELEMENT MESH 739
retaining wall
7 i |
u=0
Figure 14.15: Typical mesh dimensions for a wall retaining
an isotropic homogeneous soil.
Similar guidelines apply to diaphragm and sheet-pile walls (refer to figure
14.17).
Finite element modelling of an underground cavity or a tunnel requires an
engineering judgement as to how such a task can best be undertaken
cost-effectively. Thus 3-D modelling is appropriate when there is a
variation of soil stratification along the tunnel axis, or when stress
conditions near the tunnel face need be studied. On the other hand, an
axisymmetrical analysis is suitable in the case of a vertical shaft when the
soil stratification varies in the vertical direction only. There are instances
in which plane deformations can be assumed to prevail, and therefore only
a cross-section of the tunnel needs to be discretised. Under such
circumstances, the area covered by the mesh must reflect the expected
stress distribution and deformations around the opening.
740 FINITE ELEMENT MODELLING IN GEOTECHNICS
diaphragm wall ~3H
(or sheet pile) ee
Figure 14.17: Typical mesh dimensions for a diaphragm wall
retaining an isotropic homogeneous soil.
As explained earlier in section 12.2, the stress arching that occurs around
the opening is related to its depth and, accordingly, the dimensions of the
mesh area should typically extend to a depth of around Sd beneath the
tunnel invert, and should include the entire height of soil above the crown,
unless the cover exceeds 10d, in which case the soil thickness above the
crown can be limited to 5d (Mestat, 1997). Laterally, the dimension of the
mesh area should be extended to about 6d from the tunnel axis as
illustrated in figures 14.18(a) and (6). Obviously, these dimensions only
represent a guideline, and the engineer must always seek a compromise
between reliable predictions in terms of stress-strain distribution, and cost.
In so doing, the dimensions advocated above might need to be adjusted to
suite the site conditions.
PRACTICAL ASPECTS OF A FINITE ELEMENT MESH TAL
up to 10d
[eee
i
ae
v=0
. 3
| tigen
Figure 14.18: Typical mesh dimensions for
(a) a shallow opening and (b) a deep tunnel
(from Mestat (1997), by permission).
742 FINITE ELEMENT MODELLING IN GEOTECHNICS
References
Bathe, K. J. (1982) Finite Element Procedures in Engineering Analysis.
Prentice-Hall, Englewood Cliffs, New Jersey.
Bathe, K. J. (1996) Numerical Methods in Finite Element Analysis,
3rd edn. Prentice-Hall, Englewood Cliffs, New Jersey.
Britto, A. and Gunn, M. J. (1986) Critical State Soil Mechanics via Finite
Elements. Ellis Horwood, Chichester.
Griffiths, D. V. and Smith, I. M. (1991) Numerical Methods for Engineers.
Blackwell, Oxford.
Hoffman, J. D. (1992) Numerical Methods for Engineers and Scientists.
McGraw-Hill, New York.
Hughes, T. J. R. (1987) The Finite Element Method: Linear, Static and Dynamic
Finite Element Analysis. Prentice-Hall, Englewood Cliffs, New Jersey.
Jennings, A. and McKeown, J. J. (1992) Matrix computation, 2nd edn.
John Wiley & Sons, Chichester.
Mestat, P. (1997) Maillage d’élements finis pour les ouvrages de géotechnique:
conseils et recommandations. Bulletin de Laboratoires des Ponts et
Chaussées, 212, pp. 39-64.
Naylor, D. J. (1974) Stresses in nearly incompressible materials for finite elements
with application to the calculation of excess pore pressures. International
Journal of Numerical Methods in Engineering, 8, pp. 443-460.
Naylor, D. J. (1994) On integration rules for triangles. Proceedings of the 3rd
European Conference on Numerical Methods in Geotechnical
Engineering, Manchester (ed. I. M. Smith), Balkema, Rotterdam.
Naylor, D. J., Pande, G. N., Simpson, B. and Tabb, R. (1981) Finite Elements in
Geotechnical Engineering. Pineridge Press, Swansea, UK.
Owen, D. R. J. and Hinton, E. (1980) Finite Elements in Plasticity: Theory and
Practice. Pineridge Press, Swansea.
Reddy, J. N. (1993) An Introduction to the Finite Element Method.
McGraw-Hill, New York.
Smith, I. M. and Griffiths, D. V. (1998) Programming the Finite Element Method,
3rd edn. John Wiley & Sons, New York.
Stasa, F. L. (1985) Applied Finite Element Analysis for Engineers.
CBS International Edition, New York.
Zienkiewicz, O. C. and Taylor, R. (1991) The Finite Element Method,
(2 volumes) 4th edn. McGraw-Hill, London.
Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Lecture 2Document67 pagesLecture 2nnsPas encore d'évaluation
- Moment and CouplesDocument66 pagesMoment and CouplesUnknown_unknown_unknownPas encore d'évaluation
- Equilibrium of Rigid BodyDocument45 pagesEquilibrium of Rigid BodyHawaiiChongPas encore d'évaluation
- Static and Dynamic Chapter 1: Introduction: Norhafizah Binti Salleh 017-7722715 MANO11Document29 pagesStatic and Dynamic Chapter 1: Introduction: Norhafizah Binti Salleh 017-7722715 MANO11HawaiiChongPas encore d'évaluation
- Soil Properties of UTHMDocument1 pageSoil Properties of UTHMHawaiiChongPas encore d'évaluation
- Geotechnical Properties of Soft Clay in UTHM PDFDocument3 pagesGeotechnical Properties of Soft Clay in UTHM PDFHawaiiChongPas encore d'évaluation
- Soil Model Okt 2010Document22 pagesSoil Model Okt 2010HawaiiChongPas encore d'évaluation
- 1.0 - Health Safety & Environment Management-1Document43 pages1.0 - Health Safety & Environment Management-1HawaiiChongPas encore d'évaluation
- HIRARC GuideLine From DOSHDocument34 pagesHIRARC GuideLine From DOSHMohd Hadri50% (2)
- Engineering Properties of Batu Pahat Soft Clay Stabilized With Lime, Cement and Bentonite For Subgrade in Road ConstructionDocument46 pagesEngineering Properties of Batu Pahat Soft Clay Stabilized With Lime, Cement and Bentonite For Subgrade in Road ConstructionHawaiiChongPas encore d'évaluation
- Some Mechanical Properties of Cement Stabilized Malaysian Soft ClayDocument8 pagesSome Mechanical Properties of Cement Stabilized Malaysian Soft ClayHawaiiChongPas encore d'évaluation
- Effect of Natural Fibres Inclusion in Clay Bricks: Physico-Mechanical PropertiesDocument7 pagesEffect of Natural Fibres Inclusion in Clay Bricks: Physico-Mechanical PropertiesaefPas encore d'évaluation
- Stabilisation of Soft Soil Using Electrokinetic Stabilisation MethodDocument8 pagesStabilisation of Soft Soil Using Electrokinetic Stabilisation MethodHawaiiChongPas encore d'évaluation
- 2.1 - Risk Management & Assessment TechniqueDocument6 pages2.1 - Risk Management & Assessment TechniqueHawaiiChongPas encore d'évaluation
- HIRARC GuideLine From DOSHDocument34 pagesHIRARC GuideLine From DOSHMohd Hadri50% (2)
- 1 - Construction SafetyDocument43 pages1 - Construction SafetyHawaiiChongPas encore d'évaluation
- 2.0 - Risk Management & AssessmentDocument32 pages2.0 - Risk Management & AssessmentHawaiiChong100% (1)
- Level 3 Award in Health and Safety in The Workplace: Sample Examination QuestionsDocument2 pagesLevel 3 Award in Health and Safety in The Workplace: Sample Examination QuestionsHawaiiChongPas encore d'évaluation
- HIRARC GuideLine From DOSHDocument34 pagesHIRARC GuideLine From DOSHMohd Hadri50% (2)
- Occupational Health and Safety Questions and AnswersDocument6 pagesOccupational Health and Safety Questions and AnswersHawaiiChongPas encore d'évaluation
- OSH QuestionsDocument18 pagesOSH QuestionsHawaiiChongPas encore d'évaluation
- Chapter 3 Physical Injury and ControlsDocument53 pagesChapter 3 Physical Injury and ControlsHawaiiChongPas encore d'évaluation
- HS Specimen Qs January 2012Document4 pagesHS Specimen Qs January 2012Rana SahilPas encore d'évaluation
- Nota Osha Bab1 PDFDocument56 pagesNota Osha Bab1 PDFIrham SImPas encore d'évaluation
- Chapter 1 (Unit 1.1 - 1.2)Document59 pagesChapter 1 (Unit 1.1 - 1.2)HawaiiChongPas encore d'évaluation
- Chapter 1 (Unit 1.5 OSHMS)Document51 pagesChapter 1 (Unit 1.5 OSHMS)axxdsoul100% (1)
- Chapter 1 (Unit 1.4 EQA 1974 (Osha)Document36 pagesChapter 1 (Unit 1.4 EQA 1974 (Osha)nurul fizahPas encore d'évaluation
- Chapter 1 (Unit 1.3 FMA 1967)Document49 pagesChapter 1 (Unit 1.3 FMA 1967)axxdsoul100% (1)
- Chapter 1 (Unit 1.3 FMA 1967)Document49 pagesChapter 1 (Unit 1.3 FMA 1967)axxdsoul100% (1)
- OshaDocument31 pagesOshaAinur Sya Irah100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)