Vous aimerez peut-être aussi
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsD'EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsPas encore d'évaluation
- Interview Questions on State Variable AnalysisDocument33 pagesInterview Questions on State Variable AnalysisMainul BaikkaPas encore d'évaluation
- Sliding Mode Control Tutorial PDFDocument7 pagesSliding Mode Control Tutorial PDFva3ttnPas encore d'évaluation
- Solutions Manual For: Arm Assembly LanguageDocument129 pagesSolutions Manual For: Arm Assembly Languagemohammed IrheemPas encore d'évaluation
- Reduction of Multiple Subsystems to Single Transfer FunctionDocument28 pagesReduction of Multiple Subsystems to Single Transfer FunctionDian Riana MustafaPas encore d'évaluation
- Control Systems Notes SJBIT PDFDocument124 pagesControl Systems Notes SJBIT PDFSanath SanuPas encore d'évaluation
- Verilog - ManoDocument43 pagesVerilog - ManoMohammod Ahad ArianPas encore d'évaluation
- 92402Document34 pages92402anon_1937750530% (1)
- Network Analysis and Synthesis PDFDocument2 pagesNetwork Analysis and Synthesis PDFSomrita sarkarPas encore d'évaluation
- MIT 6.341 Lecture 20 - The Goertzel Algorithm and Chirp TransformDocument4 pagesMIT 6.341 Lecture 20 - The Goertzel Algorithm and Chirp Transformc_mc2Pas encore d'évaluation
- Solution Control System Engineering Nagrath GopalDocument2 pagesSolution Control System Engineering Nagrath Gopalganesharun123Pas encore d'évaluation
- Final Cruise ControlDocument26 pagesFinal Cruise ControlKusum LataPas encore d'évaluation
- EC2255 Control Systems Question BankDocument62 pagesEC2255 Control Systems Question BankreporterrajiniPas encore d'évaluation
- Driving Relays With stm32f407vgtx Microcontroller Using Uln2003 Relay DriverDocument12 pagesDriving Relays With stm32f407vgtx Microcontroller Using Uln2003 Relay DriverAnonymous Nlaa5HPas encore d'évaluation
- Probs CH 2Document2 pagesProbs CH 2Kiran KumarPas encore d'évaluation
- Modeling A RLC Circuits With Differential EquationsDocument19 pagesModeling A RLC Circuits With Differential EquationsQuarteendolfPas encore d'évaluation
- Digital Signal Processing ManualDocument106 pagesDigital Signal Processing Manual64emily64100% (1)
- Achieving Stable Magnetic Levitation On The Arduino PlatformDocument15 pagesAchieving Stable Magnetic Levitation On The Arduino Platformzub12345678Pas encore d'évaluation
- Signals and Systems: BooksDocument1 pageSignals and Systems: Booksfaizan bariPas encore d'évaluation
- Lecture-5 Modeling of Electromechanical SystemsDocument19 pagesLecture-5 Modeling of Electromechanical Systemsusama asifPas encore d'évaluation
- Fundamentals of Signals and Systems Using The Web and MATLAB, 2007, Edward W. Kamen, Bonnie S. Heck, 0132428628, 9780132428620, Pearson/Prentice Hall, 2007Document23 pagesFundamentals of Signals and Systems Using The Web and MATLAB, 2007, Edward W. Kamen, Bonnie S. Heck, 0132428628, 9780132428620, Pearson/Prentice Hall, 2007Teo TeiPas encore d'évaluation
- Lecture 14 Memory InterfaceDocument19 pagesLecture 14 Memory Interfacenjpar0% (2)
- Class 13 - Mathematical Modeling of Thermal SystemDocument15 pagesClass 13 - Mathematical Modeling of Thermal Systemapi-2667661650% (2)
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuPas encore d'évaluation
- Feedback Control SystemDocument40 pagesFeedback Control SystemMuhammad SaeedPas encore d'évaluation
- Sop, Pos & K-MapDocument81 pagesSop, Pos & K-MapSuma PrakashPas encore d'évaluation
- Modeling Dynamic SystemsDocument48 pagesModeling Dynamic SystemssepehrPas encore d'évaluation
- Ec 6511 Digital Signal Processing Lab Manual PDFDocument88 pagesEc 6511 Digital Signal Processing Lab Manual PDFBala913Pas encore d'évaluation
- Mechatronics (2015) Unit IIDocument38 pagesMechatronics (2015) Unit IIkishan100% (1)
- Electronic Circuits by Schilling and Belove PDFDocument5 pagesElectronic Circuits by Schilling and Belove PDFSASWATA DASGUPTAPas encore d'évaluation
- DSP - Nov 19 Q&a PDFDocument17 pagesDSP - Nov 19 Q&a PDFAnonymous yO7rcec6vuPas encore d'évaluation
- Evaluation of The Transient Response of A DC MotorDocument6 pagesEvaluation of The Transient Response of A DC MotorNesuh MalangPas encore d'évaluation
- Introduction To Control SystemsDocument28 pagesIntroduction To Control SystemsAK MizanPas encore d'évaluation
- EMG Machine AmplifierDocument12 pagesEMG Machine AmplifierShauki AliPas encore d'évaluation
- Dynamic Analysis of Switching ConvertersDocument134 pagesDynamic Analysis of Switching ConvertersLisonildoPas encore d'évaluation
- Modelling Discrete Time SystemsDocument6 pagesModelling Discrete Time SystemsSandeep KumarPas encore d'évaluation
- Adaptive Control: Presented by Harikrishna Satish.TDocument22 pagesAdaptive Control: Presented by Harikrishna Satish.THari ThotaPas encore d'évaluation
- Bode PlotDocument7 pagesBode Plotnabilo20Pas encore d'évaluation
- Multi-Stage Amplifiers and Feedback CircuitsDocument5 pagesMulti-Stage Amplifiers and Feedback CircuitsChandra SekharPas encore d'évaluation
- Simulation of a Voltage-Mode PWM Boost ConverterDocument103 pagesSimulation of a Voltage-Mode PWM Boost ConverterAshok KumarPas encore d'évaluation
- Lab Cruise Control - Modeling Part2 PDFDocument10 pagesLab Cruise Control - Modeling Part2 PDFJose Ortiz SuclupePas encore d'évaluation
- Digital and Analog Communication SystemsDocument2 pagesDigital and Analog Communication SystemsEmir AnthonyPas encore d'évaluation
- X-Y Recorder - The Web's Where You Study In!Document3 pagesX-Y Recorder - The Web's Where You Study In!Srihari KilaruPas encore d'évaluation
- Sampling PDFDocument187 pagesSampling PDFAhmed ShujaPas encore d'évaluation
- ECE18R202Document2 pagesECE18R202Jeya Prakash K0% (1)
- DigitalControlSystems Lecture 1 PDFDocument50 pagesDigitalControlSystems Lecture 1 PDFShafayet UddinPas encore d'évaluation
- Chapter 8 Manual OgataDocument53 pagesChapter 8 Manual OgataKalim UllahPas encore d'évaluation
- Ecad Lab ManualDocument55 pagesEcad Lab Manualjeravi84100% (3)
- Logic Objectives ExamDocument5 pagesLogic Objectives ExamPeejay OllabracPas encore d'évaluation
- FFT DFT DSP QuestionsDocument6 pagesFFT DFT DSP QuestionsSETNHILPas encore d'évaluation
- Flip-Flops and Related Devices CHAPTER 5Document32 pagesFlip-Flops and Related Devices CHAPTER 5badhell_18100% (1)
- Ei1252 - Transducer EngineeringDocument18 pagesEi1252 - Transducer Engineeringguru.rjpmPas encore d'évaluation
- ANN MatlabDocument13 pagesANN MatlabprashmcePas encore d'évaluation
- Introduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationD'EverandIntroduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationPas encore d'évaluation
- Dynamical Systems Method for Solving Nonlinear Operator EquationsD'EverandDynamical Systems Method for Solving Nonlinear Operator EquationsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Digital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsD'EverandDigital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsPas encore d'évaluation
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationD'EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationPas encore d'évaluation
- Room DirectoryDocument14 pagesRoom DirectoryTrinh Le TanPas encore d'évaluation
- 576-Article Text-3513-3-10-20190621Document14 pages576-Article Text-3513-3-10-20190621Trinh Le TanPas encore d'évaluation
- Trinh Le Tan Dao Thi Dai TrangDocument12 pagesTrinh Le Tan Dao Thi Dai TrangTrinh Le TanPas encore d'évaluation
- Acta 2019 - 2 - Final PDFDocument84 pagesActa 2019 - 2 - Final PDFTrinh Le TanPas encore d'évaluation
- 501-Article Text-3511-2-10-20190621Document22 pages501-Article Text-3511-2-10-20190621Trinh Le TanPas encore d'évaluation
- Mihardjo Knowledge Sharing and Transformational LeadershipDocument14 pagesMihardjo Knowledge Sharing and Transformational LeadershipTrinh Le TanPas encore d'évaluation
- Requirements For Scaling International Social Enterprises: 2019, Vol. 7, No. 1Document16 pagesRequirements For Scaling International Social Enterprises: 2019, Vol. 7, No. 1Trinh Le TanPas encore d'évaluation
- Comparative International Entrepreneurship: Theoretical Framework and Research DevelopmentDocument14 pagesComparative International Entrepreneurship: Theoretical Framework and Research DevelopmentTrinh Le TanPas encore d'évaluation
- 492-Article Text-3466-2-10-20190621Document18 pages492-Article Text-3466-2-10-20190621Trinh Le TanPas encore d'évaluation
- 468-Article Text-3183-3-10-20190318Document20 pages468-Article Text-3183-3-10-20190318Trinh Le TanPas encore d'évaluation
- Acta 2019 - 2 - Final PDFDocument84 pagesActa 2019 - 2 - Final PDFTrinh Le TanPas encore d'évaluation
- E-commerce adoption factors in Thai SMEsDocument26 pagesE-commerce adoption factors in Thai SMEsTrinh Le TanPas encore d'évaluation
- Factors Influencing The Intention To Continue Using B2B E-Commerce in Manufacturing SmesDocument6 pagesFactors Influencing The Intention To Continue Using B2B E-Commerce in Manufacturing SmesTrinh Le TanPas encore d'évaluation
- International Journal On Global Business Management and ResearchDocument112 pagesInternational Journal On Global Business Management and ResearchTrinh Le TanPas encore d'évaluation
- E-commerce adoption factors in Thai SMEsDocument26 pagesE-commerce adoption factors in Thai SMEsTrinh Le TanPas encore d'évaluation
- 007-020 - Wei-Bin ZhangDocument14 pages007-020 - Wei-Bin ZhangTrinh Le TanPas encore d'évaluation
- Báo Cáo Điều Nghiên Tiếp ThịDocument33 pagesBáo Cáo Điều Nghiên Tiếp ThịTrinh Le TanPas encore d'évaluation
- 021-035 - Hoang and HuynhDocument15 pages021-035 - Hoang and HuynhTrinh Le TanPas encore d'évaluation
- Reviewer Guidelines 8 MDocument2 pagesReviewer Guidelines 8 MTrinh Le TanPas encore d'évaluation
- MBR 2018 006Document73 pagesMBR 2018 006Trinh Le TanPas encore d'évaluation
- Baskin Robbins WordDocument44 pagesBaskin Robbins WordTrinh Le TanPas encore d'évaluation
- MBR 2018 006 PDFDocument11 pagesMBR 2018 006 PDFTrinh Le TanPas encore d'évaluation
- PBL Training - March 2016: Ginie ServantDocument4 pagesPBL Training - March 2016: Ginie ServantTrinh Le TanPas encore d'évaluation
- University of Northern Philippines: Accredited Programs (All Years 1992-2017)Document2 pagesUniversity of Northern Philippines: Accredited Programs (All Years 1992-2017)Trinh Le TanPas encore d'évaluation
- Role of Executing E-Commerce For Small and Medium Enterprises in Danang CityDocument5 pagesRole of Executing E-Commerce For Small and Medium Enterprises in Danang CityTrinh Le TanPas encore d'évaluation
- Report For SimulationDocument10 pagesReport For SimulationTrinh Le Tan50% (4)
- Digital Marketing Seminars: Topic: Word of Mouth Influences Through Viral Marketing Presenter: Tan Trinh LeDocument12 pagesDigital Marketing Seminars: Topic: Word of Mouth Influences Through Viral Marketing Presenter: Tan Trinh LeTrinh Le TanPas encore d'évaluation
- Searching Customer Satisfaction With Galaxy J7 Prime in Danang CityDocument39 pagesSearching Customer Satisfaction With Galaxy J7 Prime in Danang CityTrinh Le TanPas encore d'évaluation
- Apa GrabDocument27 pagesApa GrabTan Trinh LePas encore d'évaluation
- FTTx/GPON ONT Delivers Triple-Play ServicesDocument2 pagesFTTx/GPON ONT Delivers Triple-Play ServicesprasetyosterPas encore d'évaluation
- Communications Systems - DCN DDI Dual Delegate InterfaceDocument2 pagesCommunications Systems - DCN DDI Dual Delegate InterfaceMohamed Abdalla AlarabiPas encore d'évaluation
- Samsung Officeserv 7030: Big Features, Small BudgetDocument4 pagesSamsung Officeserv 7030: Big Features, Small BudgetNoor Ait-kaciPas encore d'évaluation
- Synchronous Lecture Notes Week 3Document21 pagesSynchronous Lecture Notes Week 3Zulfiqar AliPas encore d'évaluation
- CV of Dr. T.MuthumanickamDocument8 pagesCV of Dr. T.Muthumanickamvenkiscribd444Pas encore d'évaluation
- DPSK Modulation and DemodulationDocument7 pagesDPSK Modulation and Demodulationtaherakhans100% (1)
- ConVox Call Center Solutions IndiaDocument30 pagesConVox Call Center Solutions IndiaCall Center Software Solutions100% (1)
- Audio Visualizer With An LCD DisplayDocument8 pagesAudio Visualizer With An LCD DisplayZeal EducationPas encore d'évaluation
- TCIL 11 Inmarsat PresentationDocument48 pagesTCIL 11 Inmarsat PresentationMAX001122Pas encore d'évaluation
- DP WLAN 15021 DriversDocument3 547 pagesDP WLAN 15021 DriversWenceslao SanchezPas encore d'évaluation
- Lakshmi Publications & Suchitra Publications Price ListDocument10 pagesLakshmi Publications & Suchitra Publications Price ListVenkatesan Sundaram43% (7)
- Hikvision HDTVI Price List - Aug. 2021Document10 pagesHikvision HDTVI Price List - Aug. 2021Tejas GodaPas encore d'évaluation
- LTE Design Requirements - Coexistence With WIMI, DVB-C, DVB-TDocument14 pagesLTE Design Requirements - Coexistence With WIMI, DVB-C, DVB-TsivakumarPas encore d'évaluation
- Sismic ManualDocument123 pagesSismic ManualTecnitop SAPas encore d'évaluation
- Computer Architecture Course PlanDocument5 pagesComputer Architecture Course PlanMr.C.Makesh Assistant ProfessorPas encore d'évaluation
- 5G RAN ShedulingDocument59 pages5G RAN ShedulingPriya S100% (1)
- (Service Manual) 55S6600 - 1MT658ZZA PDFDocument57 pages(Service Manual) 55S6600 - 1MT658ZZA PDFALI ALIBELDJILALIPas encore d'évaluation
- RDT Multi FQ PDFDocument8 pagesRDT Multi FQ PDFceltorPas encore d'évaluation
- eUTRAN Radio Orange Group Indicators v4Document65 pageseUTRAN Radio Orange Group Indicators v4Kassye100% (1)
- Deploying Optimized Multicast in EvpnvxlanDocument186 pagesDeploying Optimized Multicast in EvpnvxlanLi KangPas encore d'évaluation
- Charging SubsystemDocument32 pagesCharging SubsystemSamuelPas encore d'évaluation
- BBU5900 Hardware Description (V100R013C10 - 01) (PDF) - CNDocument46 pagesBBU5900 Hardware Description (V100R013C10 - 01) (PDF) - CNhan moe80% (10)
- Improve Throughput Nokia PDFDocument8 pagesImprove Throughput Nokia PDFManas Kumar MohapatraPas encore d'évaluation
- Mobile Phones: Impacts, Challenges, and Predictions: Arlene Harris - Martin CooperDocument3 pagesMobile Phones: Impacts, Challenges, and Predictions: Arlene Harris - Martin CooperLidia IftimePas encore d'évaluation
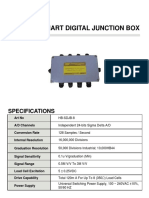
- Smart Digital Junction Box: SpecificationsDocument1 pageSmart Digital Junction Box: SpecificationsEong Huat Corporation Sdn BhdPas encore d'évaluation
- Advances in Multi-Band Microstrip Filters: More InformationDocument11 pagesAdvances in Multi-Band Microstrip Filters: More Informationduong tran binhPas encore d'évaluation
- Bermuda ICT Analysis 2010Document5 pagesBermuda ICT Analysis 2010patburchall6278Pas encore d'évaluation
- Chroma 23291 User ManualDocument162 pagesChroma 23291 User ManualChristo PherlambertPas encore d'évaluation
- 10th July 2013Document102 pages10th July 2013Adam Richardson100% (1)
- Design and Analysis of Dual Edge Triggered (DET) Flip-Flops Using Multiple C-ElementsDocument8 pagesDesign and Analysis of Dual Edge Triggered (DET) Flip-Flops Using Multiple C-ElementsArpita MukherjeePas encore d'évaluation