Vous aimerez peut-être aussi
- Handbook On Oil Cooling Blower (OCB) of Three Phase Eelectric Locomotive-May 2018Document55 pagesHandbook On Oil Cooling Blower (OCB) of Three Phase Eelectric Locomotive-May 2018Aravind JPas encore d'évaluation
- Power SupplyDocument9 pagesPower SupplyMuhammed HuzaifaPas encore d'évaluation
- Manual Lithium Iron Phosphate (LiFePO4) Battery en NL FR de ES A5Document43 pagesManual Lithium Iron Phosphate (LiFePO4) Battery en NL FR de ES A5costelchelariu100% (1)
- Prysmian ADSS InstallationDocument15 pagesPrysmian ADSS InstallationcostelchelariuPas encore d'évaluation
- SLD Plts Hybrid System 3 KW PDFDocument1 pageSLD Plts Hybrid System 3 KW PDFKeanuPas encore d'évaluation
- Components of A CCTV SystemDocument15 pagesComponents of A CCTV Systemricky100% (1)
- Installation Manual - Crystalline Photovoltaic Module - : NU-JD540Document6 pagesInstallation Manual - Crystalline Photovoltaic Module - : NU-JD540costelchelariuPas encore d'évaluation
- Soldadora UTC3843DDocument9 pagesSoldadora UTC3843DChristian ormeñoPas encore d'évaluation
- Telefono l3240b Twotone RingerDocument6 pagesTelefono l3240b Twotone Ringerblackbeast79Pas encore d'évaluation
- Utc3842 YouwangelectronicsDocument9 pagesUtc3842 YouwangelectronicsMindSet MarcosPas encore d'évaluation
- Apu8836 3Document6 pagesApu8836 3dataPas encore d'évaluation
- FLM358 FCI - AlldatasheetDocument7 pagesFLM358 FCI - AlldatasheetRobson SoaresPas encore d'évaluation
- pt1301 r3.2 PowtechDocument9 pagespt1301 r3.2 PowtechOscar Caetano FontPas encore d'évaluation
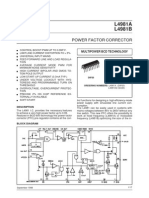
- STMicroelectronics L4981AD DatasheetDocument17 pagesSTMicroelectronics L4981AD Datasheetgafesa electronicsPas encore d'évaluation
- REM.S - para Valvula Hidraulica ProporcionalDocument2 pagesREM.S - para Valvula Hidraulica ProporcionalvamelelectronicaPas encore d'évaluation
- 20W Bridge Amplifier For Car Radio: DescriptionDocument20 pages20W Bridge Amplifier For Car Radio: DescriptionSamuel Gtr GonzalezPas encore d'évaluation
- Bay Linear: Current Mode PWM ControllerDocument11 pagesBay Linear: Current Mode PWM ControllerShashikant PatilPas encore d'évaluation
- Current Mode PWMDocument9 pagesCurrent Mode PWMluis albertoPas encore d'évaluation
- Acer Al1916w Psu-Inverter dt830Document55 pagesAcer Al1916w Psu-Inverter dt830LuisPas encore d'évaluation
- LM386 DatasheetDocument6 pagesLM386 DatasheetJamie ValentinePas encore d'évaluation
- 3022A-DIP12F: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersDocument2 pages3022A-DIP12F: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersElec ThaihoaPas encore d'évaluation
- Description Features: Preliminary and All Contents Are Subject To Change Without Prior NoticeDocument8 pagesDescription Features: Preliminary and All Contents Are Subject To Change Without Prior NoticeLuisPas encore d'évaluation
- Datasheet Komponen 1Document6 pagesDatasheet Komponen 1Awans IDPas encore d'évaluation
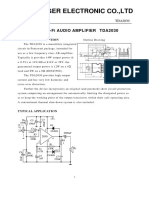
- Tda2030 PDFDocument6 pagesTda2030 PDFParmeetPas encore d'évaluation
- Features: Stereo 330mW Audio Power Amp With ShutdownDocument9 pagesFeatures: Stereo 330mW Audio Power Amp With ShutdownvetchboyPas encore d'évaluation
- LM7833 PDFDocument6 pagesLM7833 PDFDanny AlejandroPas encore d'évaluation
- DAC0800/DAC0802 8-Bit Digital-to-Analog Converters: General DescriptionDocument11 pagesDAC0800/DAC0802 8-Bit Digital-to-Analog Converters: General Descriptionmariano_74Pas encore d'évaluation
- RA35H1516M: Electrostatic Sensitive DeviceDocument8 pagesRA35H1516M: Electrostatic Sensitive DeviceCastielAngelPas encore d'évaluation
- Tda2052 AmplificadorDocument13 pagesTda2052 AmplificadorTony RamirezPas encore d'évaluation
- National Semiconductor Is Now Part of Texas InstrumentsDocument13 pagesNational Semiconductor Is Now Part of Texas InstrumentsJavier AparicioPas encore d'évaluation
- PDF SANYO 436764Document9 pagesPDF SANYO 436764Joel VSPas encore d'évaluation
- Etc Atw2815d-MstrDocument9 pagesEtc Atw2815d-MstrBaCresPas encore d'évaluation
- CR6848 Chip RailDocument3 pagesCR6848 Chip Railadamz74Pas encore d'évaluation
- VND10B DatasheetDocument11 pagesVND10B Datasheetrafaelzafra1992Pas encore d'évaluation
- Data Sheet 1SD536F2-5SNA0800N330100: Single-Channel SCALE Plug-and-Play IGBT DriverDocument6 pagesData Sheet 1SD536F2-5SNA0800N330100: Single-Channel SCALE Plug-and-Play IGBT Driverashkan emamiPas encore d'évaluation
- Utc 4558Document4 pagesUtc 4558Ysrrael SilvaPas encore d'évaluation
- 3A L.D.O. VOLTAGE REGULATOR (Adjustable & Fixed) LM1085: FeaturesDocument8 pages3A L.D.O. VOLTAGE REGULATOR (Adjustable & Fixed) LM1085: FeatureslghmshariPas encore d'évaluation
- 2SD300C17A4CDocument7 pages2SD300C17A4Csajad hejaziPas encore d'évaluation
- LM380 IntercomunicadorDocument8 pagesLM380 IntercomunicadorINNOVAPas encore d'évaluation
- Features Output Current: 1A High Output Voltage Precision: 1 High Input Voltage: 35VDocument5 pagesFeatures Output Current: 1A High Output Voltage Precision: 1 High Input Voltage: 35VDaniela GarciaPas encore d'évaluation
- LMD18200 3A, 55V H-Bridge: General DescriptionDocument13 pagesLMD18200 3A, 55V H-Bridge: General DescriptionSIELAB C.A.Pas encore d'évaluation
- Low Drop Dual Power Operational Amplifier: DescriptionDocument6 pagesLow Drop Dual Power Operational Amplifier: DescriptionBeroxi MihaiPas encore d'évaluation
- Low Power Dual Voltage Comparator: FeaturesDocument15 pagesLow Power Dual Voltage Comparator: Featuresalllim88Pas encore d'évaluation
- Obsolete: Dual Audio Analog Switches SSM2402/SSM2412Document12 pagesObsolete: Dual Audio Analog Switches SSM2402/SSM2412AllanPas encore d'évaluation
- XC6415 846928Document25 pagesXC6415 846928David WangPas encore d'évaluation
- Standard Variable Output LDO RegulatorsDocument12 pagesStandard Variable Output LDO RegulatorsDaniela GarciaPas encore d'évaluation
- Datasheet 33Document9 pagesDatasheet 33Angel Luis Aquino GonzalezPas encore d'évaluation
- L4916Document8 pagesL4916Ricardo UrioPas encore d'évaluation
- SE8117TADocument7 pagesSE8117TAdavid.gjeorgevskiPas encore d'évaluation
- 3A Step-Down Voltage Regulator LM2596HVDocument13 pages3A Step-Down Voltage Regulator LM2596HVDuc VoquangPas encore d'évaluation
- Data SheetDocument2 pagesData SheetCengiz ZorgörmezPas encore d'évaluation
- 3842Document12 pages3842luisPas encore d'évaluation
- LPR 30Document11 pagesLPR 30Pedro IsmaelPas encore d'évaluation
- Iso High Side Smart Power Solid State Relay: Table 1. General Features Figure 1. PackageDocument14 pagesIso High Side Smart Power Solid State Relay: Table 1. General Features Figure 1. PackageRida AzhariPas encore d'évaluation
- Toshiba TCD1304AP CCD Array PDFDocument15 pagesToshiba TCD1304AP CCD Array PDFLazScibdPas encore d'évaluation
- Low Drop Dual Power Operational Amplifiers: DescriptionDocument10 pagesLow Drop Dual Power Operational Amplifiers: DescriptionAmirPas encore d'évaluation
- Low Drop Dual Power Operational Amplifiers: DescriptionDocument10 pagesLow Drop Dual Power Operational Amplifiers: DescriptionAmirPas encore d'évaluation
- Ra 30 H 1317 MDocument8 pagesRa 30 H 1317 MIonut Cosmin PopaPas encore d'évaluation
- UTC7266 Linear Integrated Circuit: 7+7W Dual Bridge AmplifierDocument9 pagesUTC7266 Linear Integrated Circuit: 7+7W Dual Bridge AmplifierledPas encore d'évaluation
- L4981ADocument17 pagesL4981AMcu CdiiPas encore d'évaluation
- La 78040Document4 pagesLa 78040miloz58Pas encore d'évaluation
- LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXXDocument8 pagesLC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXXAndrés FerreyraPas encore d'évaluation
- LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXXDocument8 pagesLC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXX LC1118CS8TRXXXXArturo ArmuellesPas encore d'évaluation
- MC1489 MC1489A: Quad Line ReceiversDocument13 pagesMC1489 MC1489A: Quad Line Receiversade abangPas encore d'évaluation
- DatasheetDocument12 pagesDatasheetJuan JosePas encore d'évaluation
- Humidity Senzor AR252Document2 pagesHumidity Senzor AR252costelchelariuPas encore d'évaluation
- Ats-S User Manual 8. 7Document2 pagesAts-S User Manual 8. 7costelchelariuPas encore d'évaluation
- Sunny Tripower 5000tlDocument122 pagesSunny Tripower 5000tlcostelchelariuPas encore d'évaluation
- Fronius InstallationDocument30 pagesFronius InstallationcostelchelariuPas encore d'évaluation
- Installation Manual SMA STP 3.0 3AV 40Document100 pagesInstallation Manual SMA STP 3.0 3AV 40costelchelariuPas encore d'évaluation
- CED252 Electronic Control Unit: Working Conditions General Features CED252Document4 pagesCED252 Electronic Control Unit: Working Conditions General Features CED252costelchelariuPas encore d'évaluation
- Control Unit CED160 - ENGDocument3 pagesControl Unit CED160 - ENGcostelchelariuPas encore d'évaluation
- NU-JD540: 540 W The Project SolutionDocument2 pagesNU-JD540: 540 W The Project SolutioncostelchelariuPas encore d'évaluation
- Ecu1000 Electronic Control UnitDocument8 pagesEcu1000 Electronic Control UnitcostelchelariuPas encore d'évaluation
- 1.certificat Anti InsularizareDocument1 page1.certificat Anti InsularizarecostelchelariuPas encore d'évaluation
- Trina 390-405m 120 TSM De09-08 Vertex SDocument2 pagesTrina 390-405m 120 TSM De09-08 Vertex ScostelchelariuPas encore d'évaluation
- Datasheet Trina TSM De06m-08iiDocument2 pagesDatasheet Trina TSM De06m-08iicostelchelariuPas encore d'évaluation
- Sistem de Fixare Panouri Fotovoltaice k2 GermaniaDocument28 pagesSistem de Fixare Panouri Fotovoltaice k2 GermaniacostelchelariuPas encore d'évaluation
- Operating Smart Meter 63A-3Document20 pagesOperating Smart Meter 63A-3costelchelariuPas encore d'évaluation
- High Power Mono Perc ModuleDocument2 pagesHigh Power Mono Perc ModulecostelchelariuPas encore d'évaluation
- AS3000 Flyer E PDFDocument2 pagesAS3000 Flyer E PDFcostelchelariuPas encore d'évaluation
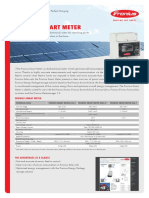
- Technical Data Fronius Smart Meter 63A 1Document2 pagesTechnical Data Fronius Smart Meter 63A 1costelchelariuPas encore d'évaluation
- SE TEA Quick Guide How To Set Up Export Limiting Using The Fronius Smart Meter en AUDocument10 pagesSE TEA Quick Guide How To Set Up Export Limiting Using The Fronius Smart Meter en AUcostelchelariuPas encore d'évaluation
- Descriere Program AARDocument2 pagesDescriere Program AARcostelchelariu100% (1)
- Proiect 2p 230v 12v20aDocument10 pagesProiect 2p 230v 12v20acostelchelariuPas encore d'évaluation
- NautiliusDocument30 pagesNautiliuscostelchelariuPas encore d'évaluation
- Mosa 15921-gb - 03-14Document36 pagesMosa 15921-gb - 03-14costelchelariuPas encore d'évaluation
- Eds460-490 D00085 M XxenDocument100 pagesEds460-490 D00085 M XxencostelchelariuPas encore d'évaluation
- Coelme CM113Document4 pagesCoelme CM113costelchelariuPas encore d'évaluation
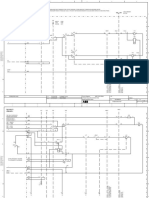
- 1HSB543260-ABT Sc. El.Document9 pages1HSB543260-ABT Sc. El.costelchelariuPas encore d'évaluation
- LGB Burner Controls N7435enDocument28 pagesLGB Burner Controls N7435endanyPas encore d'évaluation
- EMF Equation of A DC Generator - Derivation For Motor & GeneratorDocument9 pagesEMF Equation of A DC Generator - Derivation For Motor & GeneratorelutfulPas encore d'évaluation
- Brochure - Continuous Cartoning Machine-ACM-100Document2 pagesBrochure - Continuous Cartoning Machine-ACM-100infinityautomatedsolutionsPas encore d'évaluation
- Service Manual: IndexDocument29 pagesService Manual: IndexAnh ĐườngPas encore d'évaluation
- Magneto Ignition SystemsDocument20 pagesMagneto Ignition SystemsBharadwaj Gsgks100% (1)
- Operating Instructions: Before Initial Use, See "Getting Started" On Page 10Document36 pagesOperating Instructions: Before Initial Use, See "Getting Started" On Page 10Ma GynPas encore d'évaluation
- 2K23 - RK - Rep - Design of A WSN Node For Forest Trees Against PoachingDocument61 pages2K23 - RK - Rep - Design of A WSN Node For Forest Trees Against PoachingDeepu ShellgiPas encore d'évaluation
- 17 - Fault Code Tables & DPS Troubleshooting - 04ldceAAADocument16 pages17 - Fault Code Tables & DPS Troubleshooting - 04ldceAAAPabloAntonioCerdaSotoPas encore d'évaluation
- SIEMENS 04 Modelling The Use of Selective Main Miniature Circuit-BreakersDocument9 pagesSIEMENS 04 Modelling The Use of Selective Main Miniature Circuit-BreakersShailesh ChettyPas encore d'évaluation
- Insulation Resistance of Power TransformerDocument16 pagesInsulation Resistance of Power TransformerMELVIN100% (3)
- 参量混频双光梳信道化接收机Document9 pages参量混频双光梳信道化接收机Gosoviet XINGPas encore d'évaluation
- The Elementary Mathematical Model For Synchronous MachinesDocument40 pagesThe Elementary Mathematical Model For Synchronous Machinestyc1986Pas encore d'évaluation
- Part Number: Part Number Title: Subpart: Subpart Title: Standard Number: Title: GPO SourceDocument11 pagesPart Number: Part Number Title: Subpart: Subpart Title: Standard Number: Title: GPO SourcePratikPas encore d'évaluation
- Dedication: I Would Like To Take The Time To Thank God For Giving Me The Ability To Help OthersDocument88 pagesDedication: I Would Like To Take The Time To Thank God For Giving Me The Ability To Help OthersByron GonzalezPas encore d'évaluation
- Owner's Manual: JL AUDIO 250/1Document11 pagesOwner's Manual: JL AUDIO 250/1kaiser_shaikh1Pas encore d'évaluation
- TV Philips de LCD Chassis Lc4.3hu Aa 26pf5320 32pf5320 312278515810 LCDDocument60 pagesTV Philips de LCD Chassis Lc4.3hu Aa 26pf5320 32pf5320 312278515810 LCDrenzo07Pas encore d'évaluation
- Solar Specification KyenjojoDocument6 pagesSolar Specification KyenjojoKenneth KadduPas encore d'évaluation
- Pspice Bjtamp DC SweepDocument3 pagesPspice Bjtamp DC SweepManoj KavediaPas encore d'évaluation
- Excel Inventory-FileDocument27 pagesExcel Inventory-FileJevon Lorenzo AdvinculaPas encore d'évaluation
- Cne Micro Project ReportDocument16 pagesCne Micro Project Reportsurajkapse514Pas encore d'évaluation
- Distance Protection Using PSCADDocument3 pagesDistance Protection Using PSCADNirmal mehtaPas encore d'évaluation
- MP EM Ass 8: CapacitanceDocument14 pagesMP EM Ass 8: CapacitanceBlueAstro100% (1)
- Epo540 TransformerDocument72 pagesEpo540 TransformerMUHAMMAD FAHIMULLAH SOBAHUL KHAIRIPas encore d'évaluation
- TOA Ev20rDocument24 pagesTOA Ev20rCheco PachecoPas encore d'évaluation
- LVCBINd - 0120 - Rev.1Document67 pagesLVCBINd - 0120 - Rev.1Santosh KundumPas encore d'évaluation
- Single-Supply Sensor Interface Amplifier AD22057: 20. Alterable From 1 To 160 (VDocument8 pagesSingle-Supply Sensor Interface Amplifier AD22057: 20. Alterable From 1 To 160 (VEdson CostaPas encore d'évaluation