Vous aimerez peut-être aussi
- Step Pattern in QuadraticDocument2 pagesStep Pattern in Quadraticanistirmizi9683100% (2)
- MODULE 50 - SHS - GRADE 11 General Mathematics - PropositionsDocument21 pagesMODULE 50 - SHS - GRADE 11 General Mathematics - PropositionsVINCENT VILLASANTE50% (2)
- Trig Problem SetDocument6 pagesTrig Problem Setshreesha mPas encore d'évaluation
- Grade 2 - Scales, Contrary Motions, ArpeggiosDocument13 pagesGrade 2 - Scales, Contrary Motions, Arpeggiosarda gucluPas encore d'évaluation
- Diagnostic Exam in General MathematicsDocument2 pagesDiagnostic Exam in General MathematicsKaren PacabisPas encore d'évaluation
- Constructions of The Real NumbersDocument43 pagesConstructions of The Real NumbersDragomir DianaPas encore d'évaluation
- Rise Over Run To Find Gradient With Given Graphs WSDocument2 pagesRise Over Run To Find Gradient With Given Graphs WSafzabbasi100% (1)
- Static Condensation NotesDocument7 pagesStatic Condensation Notesanisha2007Pas encore d'évaluation
- Linear Algebra and Optimization BasicsDocument25 pagesLinear Algebra and Optimization BasicsRafia Mushtaq 2462-FET/BSEE/F15Pas encore d'évaluation
- Polar Form of A Complex NumberDocument6 pagesPolar Form of A Complex NumberJade Oviedo SentinellarPas encore d'évaluation
- Basic GraphDocument8 pagesBasic GraphAditPas encore d'évaluation
- 2023 MQP 2303 HindiDocument6 pages2023 MQP 2303 HindiMysTiCPHoeNiXPas encore d'évaluation
- Greedy Algorithms (For Combinatorial Optimization) : Algorithmic Methods For Mathematical Models (AMMM)Document12 pagesGreedy Algorithms (For Combinatorial Optimization) : Algorithmic Methods For Mathematical Models (AMMM)asaksjaksPas encore d'évaluation
- Modulus PDFDocument5 pagesModulus PDFBuddhikaAththanayakaPas encore d'évaluation
- QUADRATICS Notes and Homework Worksheets For TEAMDocument21 pagesQUADRATICS Notes and Homework Worksheets For TEAMTrixiaPas encore d'évaluation
- Abstract. The Hexachordal Theorem May Be Interpreted in Terms ofDocument11 pagesAbstract. The Hexachordal Theorem May Be Interpreted in Terms ofJOBPas encore d'évaluation
- Math Officiall Exam Europe +TOEFLDocument16 pagesMath Officiall Exam Europe +TOEFLwaelPas encore d'évaluation
- Mas 1 QDocument3 pagesMas 1 Qtemp mailPas encore d'évaluation
- Space Foam: Planet X QuantumDocument10 pagesSpace Foam: Planet X Quantumzaraki9Pas encore d'évaluation
- Form 1 Bab 2Document23 pagesForm 1 Bab 2Jiang ZhongWanPas encore d'évaluation
- Heuristics and Local SearchDocument31 pagesHeuristics and Local Searchreno303Pas encore d'évaluation
- Unit+4+ +Common+Functions+'20Document38 pagesUnit+4+ +Common+Functions+'20William GokeyPas encore d'évaluation
- 1.6.1 Kinematics Review (AAL)Document7 pages1.6.1 Kinematics Review (AAL)derrick owinoPas encore d'évaluation
- Find The Slope: Calculate The Rise and Run To Find The Slope of Each LineDocument2 pagesFind The Slope: Calculate The Rise and Run To Find The Slope of Each Lineapi-703253998Pas encore d'évaluation
- Rise Run Level1 1Document2 pagesRise Run Level1 1hans100% (1)
- Partitura Aula 4 - Arpejo IntercaladoDocument1 pagePartitura Aula 4 - Arpejo IntercaladoJOSE EMIDIO DE ARAUJO MAGALHAES JUNIORPas encore d'évaluation
- 1 (The) - OrchestralDocument15 pages1 (The) - OrchestralpepeteloPas encore d'évaluation
- Shabangu Professor PHI2044F 1Document6 pagesShabangu Professor PHI2044F 1Mlungisi ShabanguPas encore d'évaluation
- Department of Mathematics Indian Institute of Technology, GuwahatiDocument3 pagesDepartment of Mathematics Indian Institute of Technology, GuwahatiNaveen GuptaPas encore d'évaluation
- G Major & e MinorDocument1 pageG Major & e Minor2021to2023Pas encore d'évaluation
- Project Work: Square Root FunctionDocument13 pagesProject Work: Square Root Function17.Krisha JogiPas encore d'évaluation
- 05 Understanding InversionsDocument3 pages05 Understanding InversionsPoss HumPas encore d'évaluation
- Review Day 2 Area Between The CurvesDocument4 pagesReview Day 2 Area Between The CurvessizlasytPas encore d'évaluation
- MCR3U Unit 3 Notes - FunctionsDocument20 pagesMCR3U Unit 3 Notes - FunctionsShanaz ParsanPas encore d'évaluation
- Transformation CombinedDocument2 pagesTransformation CombinedRanPas encore d'évaluation
- 10MAM ALT 1 Homework Sheet 03Document1 page10MAM ALT 1 Homework Sheet 03fankalitsPas encore d'évaluation
- 16-05-2023 - All Seniors - Kcet GT - 8 - Maths - Q.paperDocument8 pages16-05-2023 - All Seniors - Kcet GT - 8 - Maths - Q.paperDeekshaPas encore d'évaluation
- 2 - Introduction To Matrices: A A A A A ADocument2 pages2 - Introduction To Matrices: A A A A A AD MPas encore d'évaluation
- P.1 June Holiday PackageDocument21 pagesP.1 June Holiday PackageNidoi RobinaPas encore d'évaluation
- 1.8.3SlopeofTangent DerivativeDocument4 pages1.8.3SlopeofTangent DerivativeAlan LugoPas encore d'évaluation
- Test Bank For College Algebra 9Th Edition Ron Larson Isbn 1133963021 9781133963028 Full Chapter PDFDocument36 pagesTest Bank For College Algebra 9Th Edition Ron Larson Isbn 1133963021 9781133963028 Full Chapter PDFdavid.weldon592100% (12)
- College Algebra 9th Edition Ron Larson ISBN Test BankDocument39 pagesCollege Algebra 9th Edition Ron Larson ISBN Test Bankgabriel100% (21)
- F Major & D MinorDocument1 pageF Major & D Minor2021to2023Pas encore d'évaluation
- Place The Four Fractions On The Line Below. 1Document42 pagesPlace The Four Fractions On The Line Below. 1tizulivePas encore d'évaluation
- Use The Diagram Below To Answer The Question.: Mathematics Practice TestDocument2 pagesUse The Diagram Below To Answer The Question.: Mathematics Practice TestMuhsanPas encore d'évaluation
- G Major & e MinorDocument2 pagesG Major & e Minor2021to2023Pas encore d'évaluation
- Diagnostic TestDocument6 pagesDiagnostic TestAnnalie LobianoPas encore d'évaluation
- Math Enlargement WorksheetsDocument4 pagesMath Enlargement WorksheetsNadiva NuriftitahPas encore d'évaluation
- Parallel Processing Floyd's AlgorithmDocument6 pagesParallel Processing Floyd's Algorithmomar alaniPas encore d'évaluation
- Worksheet/Activitysheet: - Week No.Document1 pageWorksheet/Activitysheet: - Week No.Louremie Delos Reyes MalabayabasPas encore d'évaluation
- 290 H/n. Jesus Is Calling: G StebbinsDocument2 pages290 H/n. Jesus Is Calling: G StebbinsLubanda HigelinPas encore d'évaluation
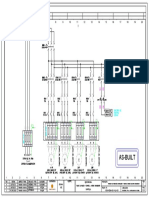
- As-Built: PE1 PE1Document1 pageAs-Built: PE1 PE1Antonio Lazo RoblesPas encore d'évaluation
- A Major and F - Minor Scales, Arpeggios, Triads, and Chord ProgressionDocument1 pageA Major and F - Minor Scales, Arpeggios, Triads, and Chord ProgressionItchanPas encore d'évaluation
- Tutorial 3Document6 pagesTutorial 3Snehita NPas encore d'évaluation
- Point 1Document2 pagesPoint 1Arif HandokoPas encore d'évaluation
- Major Scales On Grand Staff 2 OctavesDocument2 pagesMajor Scales On Grand Staff 2 OctavesJanePas encore d'évaluation
- Chart Title: X AxixDocument3 pagesChart Title: X AxixDigamber SinghPas encore d'évaluation
- Single Variable Calculus Early Transcendentals 7th Edition Stewart Test BankDocument26 pagesSingle Variable Calculus Early Transcendentals 7th Edition Stewart Test BankRobertCookdktg100% (31)
- 3.7 Systems of Inequalities (Notes) - 2Document1 page3.7 Systems of Inequalities (Notes) - 2Sophia BrannemanPas encore d'évaluation
- Ahora - Te - Puedes - Marchar - Solo - Sax Teclado de Piano Lius MiguelDocument1 pageAhora - Te - Puedes - Marchar - Solo - Sax Teclado de Piano Lius MiguelErnesto RubiPas encore d'évaluation
- D Major & B MinorDocument2 pagesD Major & B Minor2021to2023Pas encore d'évaluation
- Minor 2 Octave Scales With I IV V7 V ChordsDocument12 pagesMinor 2 Octave Scales With I IV V7 V ChordsChristine SimpsonPas encore d'évaluation
- Graph Each Shape After Reflecting It As Directed.: NameDocument2 pagesGraph Each Shape After Reflecting It As Directed.: NameKhatidja AllyPas encore d'évaluation
- Can You Hear The Music: OppenheimerDocument7 pagesCan You Hear The Music: OppenheimerjakobPas encore d'évaluation
- Department of Mechanical Engineering (SET) Quiz 3-KOM B.Tech-Mechanical Engineering Room No - 109 (Block - 1)Document1 pageDepartment of Mechanical Engineering (SET) Quiz 3-KOM B.Tech-Mechanical Engineering Room No - 109 (Block - 1)Ananda BabuPas encore d'évaluation
- Stress Recovery PDFDocument6 pagesStress Recovery PDFAnanda BabuPas encore d'évaluation
- Mechanics of Composite Materials and StructuresDocument25 pagesMechanics of Composite Materials and StructuresAnanda BabuPas encore d'évaluation
- Engineering Mechanics - Prof AnivelDocument37 pagesEngineering Mechanics - Prof AnivelAnanda BabuPas encore d'évaluation
- Sarang Math ProjectDocument10 pagesSarang Math Projectsarangmasal.1212Pas encore d'évaluation
- lattices-and-boolean-algebra-PPT 2Document12 pageslattices-and-boolean-algebra-PPT 2TamilselviPas encore d'évaluation
- 3 D Geometric Algebra 1Document56 pages3 D Geometric Algebra 1John StarrettPas encore d'évaluation
- Unit - 1 To 3 Mathematics Sem 2Document184 pagesUnit - 1 To 3 Mathematics Sem 2Robin PerkinsPas encore d'évaluation
- Algebra 4 Principles and Sample ProblemsDocument9 pagesAlgebra 4 Principles and Sample ProblemsKrisha Jean MacalinoPas encore d'évaluation
- Remedial Notes Grade 12 Maths MatrixDocument3 pagesRemedial Notes Grade 12 Maths MatrixAbhinav RajuPas encore d'évaluation
- Chapter 5.4: Regular Singular Points: We Now Study Solutions of + Q (X) y + R (X) y 0 Near A Regular Singular PointDocument13 pagesChapter 5.4: Regular Singular Points: We Now Study Solutions of + Q (X) y + R (X) y 0 Near A Regular Singular Pointpartha4uPas encore d'évaluation
- Practice Homework SetDocument58 pagesPractice Homework SetTro emaislivrosPas encore d'évaluation
- Set TheoryDocument16 pagesSet Theoryvipul davePas encore d'évaluation
- Ch5 (4e) Soln Part2Document34 pagesCh5 (4e) Soln Part2Moh'd M. GharbiehPas encore d'évaluation
- C4 IntegrationDocument26 pagesC4 IntegrationWojtek BażantPas encore d'évaluation
- Chapter 18: Graphing Straight Lines Chapter Pre-TestDocument3 pagesChapter 18: Graphing Straight Lines Chapter Pre-TestIvanakaPas encore d'évaluation
- Weiliang Zuo, Jingmin Xin, Jiasong Wang, Nanning Zheng, and Akira SanoDocument5 pagesWeiliang Zuo, Jingmin Xin, Jiasong Wang, Nanning Zheng, and Akira SanoWeiliang ZuoPas encore d'évaluation
- 2-1 Solving One-Step Equations - : Christmas Color Match ActivityDocument4 pages2-1 Solving One-Step Equations - : Christmas Color Match ActivityDulce CastroPas encore d'évaluation
- Cambridge Part 2567Document30 pagesCambridge Part 2567Chandan GuptaPas encore d'évaluation
- 1st Draft AlexanderDocument20 pages1st Draft AlexanderHassan MtenziPas encore d'évaluation
- Taylor SeriesDocument19 pagesTaylor SeriesImaya SenuriPas encore d'évaluation
- OPP-1, Math Real No, HCF, LCM/EDLDocument1 pageOPP-1, Math Real No, HCF, LCM/EDLPraxis Vidyapeeth Rudhauli BastiPas encore d'évaluation
- Pre Calculus Homework AnswersDocument8 pagesPre Calculus Homework Answersfvbcgxtif100% (1)
- Syllabus Integrated Math 2Document3 pagesSyllabus Integrated Math 2api-278118889Pas encore d'évaluation
- Sally Sets Up Her Jewellery Store Each Sunday Morning at The Meet Street MarketsDocument7 pagesSally Sets Up Her Jewellery Store Each Sunday Morning at The Meet Street Marketsapi-265609825Pas encore d'évaluation
- Module 1 Lesson 1 - System of Linear EquationsDocument6 pagesModule 1 Lesson 1 - System of Linear EquationsAbegail VillanuevaPas encore d'évaluation
- CH 1 Math ReviewDocument29 pagesCH 1 Math Reviewfatimajafar2003Pas encore d'évaluation
- Math Test Sample G9Document5 pagesMath Test Sample G9ABDEL SALAM BUAH APIONPas encore d'évaluation