Vous aimerez peut-être aussi
- Nema MG10 PDFDocument27 pagesNema MG10 PDFManuel Antonio Santos VargasPas encore d'évaluation
- JDM B18C Type RDocument6 pagesJDM B18C Type RSeenka CapuqPas encore d'évaluation
- Handbook For ASHA On Home Based Care For Young Child-EnglishDocument116 pagesHandbook For ASHA On Home Based Care For Young Child-EnglishDr. Vanitha BPas encore d'évaluation
- Method Statement For Traffic Light Installation 1Document44 pagesMethod Statement For Traffic Light Installation 1Khairul Anuar80% (5)
- Bomber JacketDocument3 pagesBomber JacketLaura Carrascosa FusterPas encore d'évaluation
- Nissan 720 L4-2.0-Z20 1983-86 Manual PDFDocument641 pagesNissan 720 L4-2.0-Z20 1983-86 Manual PDFEduardo Ariel JuarezPas encore d'évaluation
- Astm D974-97Document7 pagesAstm D974-97QcHePas encore d'évaluation
- LINEAR INDUCTION MOTOR 6981660.ppsxDocument56 pagesLINEAR INDUCTION MOTOR 6981660.ppsxFalley FasterPas encore d'évaluation
- MS Iec 60364 4 41 2007 Confirmed 2015 PrepdfDocument5 pagesMS Iec 60364 4 41 2007 Confirmed 2015 PrepdfKhairul Anuar0% (2)
- Vissim Introduction - 2016 PDFDocument42 pagesVissim Introduction - 2016 PDFBeby RizcovaPas encore d'évaluation
- Path Planning for Vehicles Operating in Uncertain 2D EnvironmentsD'EverandPath Planning for Vehicles Operating in Uncertain 2D EnvironmentsPas encore d'évaluation
- 1 s2.0 S2352146518305143 Main PDFDocument8 pages1 s2.0 S2352146518305143 Main PDFParthi PPas encore d'évaluation
- Information Management and Applications of IntelliDocument4 pagesInformation Management and Applications of IntelliAndy Josue RiveraPas encore d'évaluation
- 1 s2.0 S2352146517305367 MainDocument14 pages1 s2.0 S2352146517305367 MainArqacPas encore d'évaluation
- 1 s2.0 S2352146517304593 MainDocument14 pages1 s2.0 S2352146517304593 MainhhthunderbirdPas encore d'évaluation
- Time Table-MainDocument10 pagesTime Table-MainMustafa Murat ŞahinPas encore d'évaluation
- Unifiable Multi Commodity Kinematic Wave ModelDocument20 pagesUnifiable Multi Commodity Kinematic Wave ModelMaruf MuhammadPas encore d'évaluation
- Transit Oriented Development and Its Impact On LevDocument20 pagesTransit Oriented Development and Its Impact On LevBadr KaziPas encore d'évaluation
- 1 s2.0 S2352146517305173 MainDocument10 pages1 s2.0 S2352146517305173 Mainvs.shernazPas encore d'évaluation
- 1 s2.0 S2352146521004361 MainDocument8 pages1 s2.0 S2352146521004361 MainanupamskariaPas encore d'évaluation
- Pell (2017) - Trends in Real-Time Traffic SimulationDocument8 pagesPell (2017) - Trends in Real-Time Traffic SimulationJorge OchoaPas encore d'évaluation
- Do Vehicles Sense, Detect and Locate Speed Bumps? Do Vehicles Sense, Detect and Locate Speed Bumps?Document8 pagesDo Vehicles Sense, Detect and Locate Speed Bumps? Do Vehicles Sense, Detect and Locate Speed Bumps?Chinmaya naikPas encore d'évaluation
- Prediction of Traffic Conflicts at Signalized Intersections UsingDocument8 pagesPrediction of Traffic Conflicts at Signalized Intersections Usingmahendra.ramandaPas encore d'évaluation
- Transportation Research Part C: Jia Zheng Zhu, Jin Xin Cao, Yuan ZhuDocument16 pagesTransportation Research Part C: Jia Zheng Zhu, Jin Xin Cao, Yuan ZhujoanaPas encore d'évaluation
- The Application of The Queuing Theory in The Traffic Flow of IntersectionDocument4 pagesThe Application of The Queuing Theory in The Traffic Flow of IntersectionSHUBHAM MEHROTRAPas encore d'évaluation
- BischoffDocument7 pagesBischoffKerimcanPas encore d'évaluation
- Uml MethodDocument20 pagesUml MethodRogelio DuranPas encore d'évaluation
- Stream Equivalency Factor For Mixed Traffic at Urban Signalized IntersectionsDocument7 pagesStream Equivalency Factor For Mixed Traffic at Urban Signalized IntersectionsasdPas encore d'évaluation
- YUE Unr 0139D 13125Document101 pagesYUE Unr 0139D 13125EMMANUEL ELIYAPas encore d'évaluation
- 1 s2.0 S235214652100123X MainDocument8 pages1 s2.0 S235214652100123X MainIUST TRLPas encore d'évaluation
- APTS-A Taxonomy and CommercialDocument99 pagesAPTS-A Taxonomy and CommercialDodi Julianto فاصلPas encore d'évaluation
- Karakikes 2016Document9 pagesKarakikes 2016Okan DurmazPas encore d'évaluation
- 1 s2.0 S1877050918322324 Main PDFDocument7 pages1 s2.0 S1877050918322324 Main PDFJosue MarshallPas encore d'évaluation
- Friedrich PC MacroDocument16 pagesFriedrich PC MacroabkhaledPas encore d'évaluation
- 1 s2.0 S026412751830532X MainDocument12 pages1 s2.0 S026412751830532X Maingino andradePas encore d'évaluation
- Optimisation in Transport and Logistic ProcessesDocument8 pagesOptimisation in Transport and Logistic Processeshamza elgarragPas encore d'évaluation
- A Comparison of Deep Learning Methods For Urban Traffic Forecasting Using Floating Car DataDocument8 pagesA Comparison of Deep Learning Methods For Urban Traffic Forecasting Using Floating Car DataAlejandroAragonPas encore d'évaluation
- 1 s2.0 S2352146517304398 MainDocument10 pages1 s2.0 S2352146517304398 MainGirmsh Yeshewaw GsPas encore d'évaluation
- Sb-Major ProjectDocument27 pagesSb-Major Projectsana sultanaPas encore d'évaluation
- Automation of HyperloopDocument7 pagesAutomation of HyperloopIJRASETPublicationsPas encore d'évaluation
- Improving Transit Performance With Advanced Public Transportation System TechnologiesDocument139 pagesImproving Transit Performance With Advanced Public Transportation System TechnologiesAshvin SinghPas encore d'évaluation
- Supply Chain Analytics - 19mia1102Document6 pagesSupply Chain Analytics - 19mia1102Bandi Rajesh Reddy 19MIA1102Pas encore d'évaluation
- Mice 12702Document20 pagesMice 12702Vismar OchoaPas encore d'évaluation
- Integrated Multimodal Transit Route Network Design With Feeder Systems Integrated Multimodal Transit Route Network Design With Feeder SystemsDocument8 pagesIntegrated Multimodal Transit Route Network Design With Feeder Systems Integrated Multimodal Transit Route Network Design With Feeder SystemsUroojPas encore d'évaluation
- Comparative Analysis of Real Transport Protocol and Stream Control Transmission Protocol Over Motion Pictures Expert Group-4Document11 pagesComparative Analysis of Real Transport Protocol and Stream Control Transmission Protocol Over Motion Pictures Expert Group-4Dr-Liaqat AliPas encore d'évaluation
- Identifying Passengers' Needs in Cabin Interiors of High-Speed Rails in China Using Quality Function Deployment For Improving Passenger SatisfactionDocument17 pagesIdentifying Passengers' Needs in Cabin Interiors of High-Speed Rails in China Using Quality Function Deployment For Improving Passenger SatisfactionmorayolandaPas encore d'évaluation
- Transit Signal Priority With Connected Vehicle TechnologyDocument11 pagesTransit Signal Priority With Connected Vehicle TechnologySimona NicoletaPas encore d'évaluation
- ChandanDocument17 pagesChandanDung NguyenPas encore d'évaluation
- Combine PDFDocument205 pagesCombine PDFKayla Dwi AnindyaPas encore d'évaluation
- Jurnal 7 (Internasional)Document9 pagesJurnal 7 (Internasional)Kayla Dwi AnindyaPas encore d'évaluation
- Emerging Trends in Computing: Reliability Design For A VANET With WUGFT Subject To Time and Cost ConstraintsDocument6 pagesEmerging Trends in Computing: Reliability Design For A VANET With WUGFT Subject To Time and Cost ConstraintsamuthakarPas encore d'évaluation
- 1 s2.0 S2352146523002454 MainDocument8 pages1 s2.0 S2352146523002454 Mainabrulika123Pas encore d'évaluation
- Route Learning A Machine Learning-Based Approach TDocument8 pagesRoute Learning A Machine Learning-Based Approach TBbb AaaPas encore d'évaluation
- A Framework For Ongoing Performance Monitoring of Bus Lane SystemDocument7 pagesA Framework For Ongoing Performance Monitoring of Bus Lane SystemZainol IkhwanPas encore d'évaluation
- ThesisDocument236 pagesThesisareshiPas encore d'évaluation
- Optimization of Multimodal Transportation Chains in The Kaleidoscope of Information TechnologyDocument6 pagesOptimization of Multimodal Transportation Chains in The Kaleidoscope of Information TechnologyTushar K GohelPas encore d'évaluation
- PasajerosDocument13 pagesPasajerosVanessa BoteroPas encore d'évaluation
- ManuscriptDocument15 pagesManuscriptNheil Dominic AtoPas encore d'évaluation
- 1 s2.0 S2352146520307754 MainDocument8 pages1 s2.0 S2352146520307754 Mainmulyadiari867Pas encore d'évaluation
- Queue LengthDocument19 pagesQueue Lengthnokibe4356Pas encore d'évaluation
- (IJCST-V5I4P12) :K.Ravikumar, T.VishvaroobiDocument7 pages(IJCST-V5I4P12) :K.Ravikumar, T.VishvaroobiEighthSenseGroupPas encore d'évaluation
- (Paperhub) 10.3141 2366 04 PDFDocument9 pages(Paperhub) 10.3141 2366 04 PDFmehdiPas encore d'évaluation
- JOIE Volume 11 Issue 2 Pages 77-87Document11 pagesJOIE Volume 11 Issue 2 Pages 77-87MalloxPas encore d'évaluation
- 1 s2.0 S2352146517306476 MainDocument14 pages1 s2.0 S2352146517306476 MainANIL KUMARPas encore d'évaluation
- Simulation Modelling Practice and TheoryDocument13 pagesSimulation Modelling Practice and TheoryashlyduartPas encore d'évaluation
- Modern Airport Management - Fostering Individual Door-To-Door Travel Modern Airport Management - Fostering Individual Door-To-Door TravelDocument14 pagesModern Airport Management - Fostering Individual Door-To-Door Travel Modern Airport Management - Fostering Individual Door-To-Door TravelVinay ViswamPas encore d'évaluation
- Eej 7 178Document9 pagesEej 7 178princessangeldraPas encore d'évaluation
- Performance Evaluation of Adaptive Ramp-Metering ADocument10 pagesPerformance Evaluation of Adaptive Ramp-Metering AEdson Lozano LafforePas encore d'évaluation
- Pipeline Real-time Data Integration and Pipeline Network Virtual Reality System: Digital Oil & Gas Pipeline: Research and PracticeD'EverandPipeline Real-time Data Integration and Pipeline Network Virtual Reality System: Digital Oil & Gas Pipeline: Research and PracticePas encore d'évaluation
- Block Programming With Raspberry Pi Pico: Step 1: BOMDocument4 pagesBlock Programming With Raspberry Pi Pico: Step 1: BOMKhairul AnuarPas encore d'évaluation
- 10 Traffic Signals Under SCOOT Control Effective Design Principles Jackie DaviesDocument12 pages10 Traffic Signals Under SCOOT Control Effective Design Principles Jackie DaviesKhairul AnuarPas encore d'évaluation
- Remote Monitoring System RMSDocument4 pagesRemote Monitoring System RMSKhairul AnuarPas encore d'évaluation
- Dahua Access ANPR Camera Users Manual V 1.0.2Document105 pagesDahua Access ANPR Camera Users Manual V 1.0.2Khairul AnuarPas encore d'évaluation
- DIN330 Self-Reclosing Earth Leakage Relay User's Manual: A Brief OverviewDocument2 pagesDIN330 Self-Reclosing Earth Leakage Relay User's Manual: A Brief OverviewKhairul AnuarPas encore d'évaluation
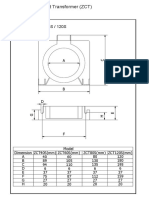
- zct40 60 80 120s Man PDFDocument1 pagezct40 60 80 120s Man PDFKhairul AnuarPas encore d'évaluation
- Ltn-1-09 Signal Controlled RoundaboutsDocument54 pagesLtn-1-09 Signal Controlled RoundaboutsKhairul AnuarPas encore d'évaluation
- Cat 6 UTP Outdoor Cable 1427319-1Document2 pagesCat 6 UTP Outdoor Cable 1427319-1Khairul AnuarPas encore d'évaluation
- SCATS Picture 6.8.2 Release Notes PDFDocument1 pageSCATS Picture 6.8.2 Release Notes PDFKhairul AnuarPas encore d'évaluation
- Handy Cross - SCOOT TP RedactedDocument12 pagesHandy Cross - SCOOT TP RedactedKhairul AnuarPas encore d'évaluation
- Format For Installation CommissioningDocument2 pagesFormat For Installation CommissioningKhairul AnuarPas encore d'évaluation
- TRL Guidance On Wireless Linking of MOVA DetectorsDocument4 pagesTRL Guidance On Wireless Linking of MOVA DetectorsKhairul AnuarPas encore d'évaluation
- FINAL Traffic Signal Maintenance Consolidation StudyDocument23 pagesFINAL Traffic Signal Maintenance Consolidation StudyKhairul AnuarPas encore d'évaluation
- Specification TCS 016 Traffic Signal ControllersDocument43 pagesSpecification TCS 016 Traffic Signal ControllersKhairul AnuarPas encore d'évaluation
- STD Spec RdWrks 2016 OnlineDocument169 pagesSTD Spec RdWrks 2016 OnlineKhairul Anuar100% (1)
- Introduction To New Generation Scats 6 5Document27 pagesIntroduction To New Generation Scats 6 5Khairul AnuarPas encore d'évaluation
- Setting Times of ConcreteDocument3 pagesSetting Times of ConcreteP DhanunjayaPas encore d'évaluation
- Ae 2 PerformanceDocument4 pagesAe 2 PerformanceankitPas encore d'évaluation
- SVR Neuro Quote 2 PROvidoDocument3 pagesSVR Neuro Quote 2 PROvidoChejarla Naveen KumarPas encore d'évaluation
- Etl 213-1208.10 enDocument1 pageEtl 213-1208.10 enhossamPas encore d'évaluation
- Design of Cycle Rickshaw For School ChildrenDocument23 pagesDesign of Cycle Rickshaw For School ChildrenAditya GuptaPas encore d'évaluation
- Ceu Guidance Problematic Bleeding Hormonal ContraceptionDocument28 pagesCeu Guidance Problematic Bleeding Hormonal Contraceptionmarina_shawkyPas encore d'évaluation
- Commercial Kitchen Fire InvestigationsDocument6 pagesCommercial Kitchen Fire InvestigationsBen ConnonPas encore d'évaluation
- 11 - Morphology AlgorithmsDocument60 pages11 - Morphology AlgorithmsFahad MattooPas encore d'évaluation
- Vegetable Rates - 02-01-2021Document454 pagesVegetable Rates - 02-01-2021Saurabh RajputPas encore d'évaluation
- Worksheet - Labeling Waves: NameDocument2 pagesWorksheet - Labeling Waves: NameNubar MammadovaPas encore d'évaluation
- 2019 - High Levels of Polypharmacy in RheumatoidDocument7 pages2019 - High Levels of Polypharmacy in RheumatoidGustavo ResendePas encore d'évaluation
- Scalextric Arc One GuideDocument46 pagesScalextric Arc One GuidenotifyatpriPas encore d'évaluation
- International Travel Insurance Policy: PreambleDocument20 pagesInternational Travel Insurance Policy: Preamblethakurankit212Pas encore d'évaluation
- Biasing Opamps Into Class ADocument11 pagesBiasing Opamps Into Class AsddfsdcascPas encore d'évaluation
- API Casing Collapse CalcsDocument8 pagesAPI Casing Collapse CalcsJay SadPas encore d'évaluation
- Part 3-Chap 2 - Classification of Buildings Based On OccupanciesDocument60 pagesPart 3-Chap 2 - Classification of Buildings Based On Occupanciesfaruque65Pas encore d'évaluation
- Burst Abdomen 3Document12 pagesBurst Abdomen 3Satvik BansalPas encore d'évaluation
- Ield Methods: A Typical Field Mapping Camp in The 1950sDocument4 pagesIeld Methods: A Typical Field Mapping Camp in The 1950sshivam soniPas encore d'évaluation
- Hydraulics Course FileDocument81 pagesHydraulics Course FileSwarna LathaPas encore d'évaluation
- Book 2 - Koning (COMPLETO)Document100 pagesBook 2 - Koning (COMPLETO)Kevin VianaPas encore d'évaluation
- Digital ElectronicsDocument18 pagesDigital ElectronicsHarry BeggyPas encore d'évaluation
- Biochem Acids and Bases Lab ReportDocument4 pagesBiochem Acids and Bases Lab ReportShaina MabborangPas encore d'évaluation
- Industrial Revolution OutlineDocument8 pagesIndustrial Revolution OutlineGeraldine GuarinPas encore d'évaluation