Vous aimerez peut-être aussi
- Course PC3, Dubai Applic Ation of Prote Ctive Relayi NG To Distri Bution and Sub-Trans Missi On Syste MsDocument41 pagesCourse PC3, Dubai Applic Ation of Prote Ctive Relayi NG To Distri Bution and Sub-Trans Missi On Syste MsMahmoud Al-QudahPas encore d'évaluation
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsD'EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsPas encore d'évaluation
- Protection & Coordination by - Dr. Hamid JaffariDocument83 pagesProtection & Coordination by - Dr. Hamid JaffariMuhammad HusnainPas encore d'évaluation
- Knowledge is "Real Power": Introduction to Power QualityD'EverandKnowledge is "Real Power": Introduction to Power QualityPas encore d'évaluation
- Protection Phillosphy With ScadaDocument11 pagesProtection Phillosphy With ScadaPrashant TrivediPas encore d'évaluation
- Lec8 Numerical Distance ProtectionDocument24 pagesLec8 Numerical Distance ProtectionEVTPas encore d'évaluation
- Principles of Differential Protection Technology: Power Transmission and DistributionDocument19 pagesPrinciples of Differential Protection Technology: Power Transmission and DistributionDinesh Pitchaivel100% (1)
- Type: P962 Type: P962 Type: P962 Type: P9620 0 0 0Document3 pagesType: P962 Type: P962 Type: P962 Type: P9620 0 0 0technomuraliPas encore d'évaluation
- Radial Feeder ProtectionDocument26 pagesRadial Feeder ProtectionLeo GaghanPas encore d'évaluation
- General Line Protection: List of TopicsDocument104 pagesGeneral Line Protection: List of TopicsMeghavahina100% (1)
- In The Name of The Most Beneficent & The Most Merciful: Radio and TV Antenna 1Document42 pagesIn The Name of The Most Beneficent & The Most Merciful: Radio and TV Antenna 1Bhanu Prakash100% (1)
- Singarapet 110 KV Main Distance RelaysDocument37 pagesSingarapet 110 KV Main Distance RelaysR.EASWARANPas encore d'évaluation
- 1MRK508019-BEN A en Fuse Supervisory Relays RXBA 4 RXETB 1 PDFDocument6 pages1MRK508019-BEN A en Fuse Supervisory Relays RXBA 4 RXETB 1 PDFUmanshu PandeyPas encore d'évaluation
- Line Protection: Substation Automation ProductsDocument46 pagesLine Protection: Substation Automation ProductsRobert MihayoPas encore d'évaluation
- Different Philosophy Used For Generator Reverse-Low Forward Power Rotection R1Document5 pagesDifferent Philosophy Used For Generator Reverse-Low Forward Power Rotection R1Yadav AkhileshPas encore d'évaluation
- Earth Fault Protection PDFDocument27 pagesEarth Fault Protection PDFSuresh Chandra PadhyPas encore d'évaluation
- KKMurty Sir Tutorial On Differential Protn CKT - IEEMA Journal May'22Document6 pagesKKMurty Sir Tutorial On Differential Protn CKT - IEEMA Journal May'22Amit BiswasPas encore d'évaluation
- OC SettingsDocument2 pagesOC Settingsdkandh0% (1)
- CT Class Very ImportantDocument6 pagesCT Class Very ImportantEngr Fahimuddin QureshiPas encore d'évaluation
- SBEF and REFDocument8 pagesSBEF and REFadhyartha100% (1)
- IEEMA Article On Over Current ProtectionDocument5 pagesIEEMA Article On Over Current ProtectionHari Krishna.MPas encore d'évaluation
- Principle of Weak InFeed Echo Permissive Over Reach Transfer Trip SchemesDocument6 pagesPrinciple of Weak InFeed Echo Permissive Over Reach Transfer Trip SchemesThirumalPas encore d'évaluation
- 7sd52 7sd62 ConfigurationDocument14 pages7sd52 7sd62 ConfigurationWilber LucasPas encore d'évaluation
- REL 531-1-0 Line Distance Protection TerminalDocument20 pagesREL 531-1-0 Line Distance Protection Terminalsenthil kumarPas encore d'évaluation
- Problems of Circuit InterruptionDocument20 pagesProblems of Circuit Interruptioneeng812450% (2)
- Design of Protection Scheme Using Distance RelayingDocument21 pagesDesign of Protection Scheme Using Distance RelayingAbhijit KuvarPas encore d'évaluation
- Capacitance Voltage Transforme1Document4 pagesCapacitance Voltage Transforme1ayushPas encore d'évaluation
- NERC Protection System Protection Fundamentals Public 060210Document55 pagesNERC Protection System Protection Fundamentals Public 060210srinivasaphanikiranPas encore d'évaluation
- P633 - Test - Tools Farhad Rev 01Document4 pagesP633 - Test - Tools Farhad Rev 01Mosa Elnaid ElnaidPas encore d'évaluation
- 4-Distance ProtectionDocument124 pages4-Distance ProtectionmubarakkirkoPas encore d'évaluation
- Protection of Complex Transmission Circuits: Network Protection & Automation GuideDocument18 pagesProtection of Complex Transmission Circuits: Network Protection & Automation GuideShailesh ChettyPas encore d'évaluation
- 7UT - Diff Bias SlopeDocument11 pages7UT - Diff Bias SlopeksarawanPas encore d'évaluation
- Inadvertent Energization Generator Protection IEEEDocument1 pageInadvertent Energization Generator Protection IEEEFirmanJohannesMaruliTuaSimanullangPas encore d'évaluation
- LDP Micom Relays P441 & P442 For Distance ProtectionDocument16 pagesLDP Micom Relays P441 & P442 For Distance ProtectionRakesh MishraPas encore d'évaluation
- Line Differential Protection - HeddingDocument69 pagesLine Differential Protection - HeddingIgnacio Lucas Avila ManganoPas encore d'évaluation
- Exercise - Setting An SEL-751A To Replace An Existing Electromechanical RelayDocument8 pagesExercise - Setting An SEL-751A To Replace An Existing Electromechanical RelayDavidPas encore d'évaluation
- Application of Distance and Line Current Differential Relays in Breaker-and-a-Half ConfigurationsDocument7 pagesApplication of Distance and Line Current Differential Relays in Breaker-and-a-Half ConfigurationsYrene De Jesus Alvarez VasquezPas encore d'évaluation
- Easun Reyrolle: Figure 11. Star Connected Bank, Two Limbs Per PhaseDocument20 pagesEasun Reyrolle: Figure 11. Star Connected Bank, Two Limbs Per PhaseE.AvinashPas encore d'évaluation
- Differential Zero SequenceDocument7 pagesDifferential Zero SequenceMosa DalahmaPas encore d'évaluation
- EET414 Chapter 5Document46 pagesEET414 Chapter 5Lee Boon HongPas encore d'évaluation
- Relay For Transformer Backup ProtectionDocument6 pagesRelay For Transformer Backup ProtectionOmar Chayña VelásquezPas encore d'évaluation
- Earth Fault RelayDocument1 pageEarth Fault RelayAliu AlaoPas encore d'évaluation
- 1 DC System DC AC Circuit at The Sub StationDocument19 pages1 DC System DC AC Circuit at The Sub Stationapi-258852000% (1)
- CT CVT LaDocument66 pagesCT CVT LaMidhun VarghesePas encore d'évaluation
- Grounddistancerelays Residualcompensation PDFDocument13 pagesGrounddistancerelays Residualcompensation PDFShahzadmbhattiPas encore d'évaluation
- Cigre SC B5-WorkshopDocument40 pagesCigre SC B5-WorkshopCarlos Roberto Hernandez FerrerPas encore d'évaluation
- Different Types of Line Protection: Reasons For FaultsDocument13 pagesDifferent Types of Line Protection: Reasons For FaultskarlTronxoPas encore d'évaluation
- Distance ProtectionDocument14 pagesDistance ProtectionBrenda Naranjo MorenoPas encore d'évaluation
- APN-052 Directional Ground-Fault ProtectionDocument17 pagesAPN-052 Directional Ground-Fault ProtectionWalter Andres Estevez VasquezPas encore d'évaluation
- p345 Technical ManualDocument1 pagep345 Technical ManualabhayambujPas encore d'évaluation
- Ladder DiagramDocument17 pagesLadder DiagramItsMeRyanCPas encore d'évaluation
- Transformer Protection in SubstationDocument20 pagesTransformer Protection in SubstationManu JosephPas encore d'évaluation
- Type VTT 11, 12: Definite Time Delay RelayDocument6 pagesType VTT 11, 12: Definite Time Delay RelayArun KumarPas encore d'évaluation
- Circuit BreakerDocument6 pagesCircuit BreakerSindhuKumarPas encore d'évaluation
- CT Saturation ModificadoDocument5 pagesCT Saturation ModificadoRaul Hernandez MendozaPas encore d'évaluation
- CT Saturation CalculatorDocument83 pagesCT Saturation Calculatorykh92167Pas encore d'évaluation
- Abb Rel561 Setting CalculationDocument28 pagesAbb Rel561 Setting CalculationAbhishek Rajput100% (1)
- 115kv North Mubarraz Line Set-1 (Abb Rel561)Document22 pages115kv North Mubarraz Line Set-1 (Abb Rel561)shanthikumaravelPas encore d'évaluation
- Distance Protection CalculationDocument2 pagesDistance Protection CalculationDileep ReddyPas encore d'évaluation
- IECEx and North American Hazloc Markings Hazcon IncDocument1 pageIECEx and North American Hazloc Markings Hazcon IncpothirajPas encore d'évaluation
- SX44Document4 pagesSX44Mk MakyPas encore d'évaluation
- 7SK80 Protection of Medium-Power Motors A1 PDFDocument11 pages7SK80 Protection of Medium-Power Motors A1 PDFpothirajPas encore d'évaluation
- Motor Vibration AnalysisDocument1 pageMotor Vibration AnalysispothirajPas encore d'évaluation
- VSMDocument12 pagesVSMpothirajPas encore d'évaluation
- 7SK80 Protection of Medium-Power Motors A1 PDFDocument11 pages7SK80 Protection of Medium-Power Motors A1 PDFpothirajPas encore d'évaluation
- 01 Getting StartedDocument44 pages01 Getting StartedAsbokid SeniorPas encore d'évaluation
- Mohit Soni ReportDocument104 pagesMohit Soni ReportMohitPas encore d'évaluation
- Parametri TobyDocument111 pagesParametri TobyZoran MilovicPas encore d'évaluation
- Cambridge Ordinary LevelDocument4 pagesCambridge Ordinary LevelHaziq AfzalPas encore d'évaluation
- A30050-X6026-X-4-7618-rectifier GR60Document17 pagesA30050-X6026-X-4-7618-rectifier GR60baothienbinhPas encore d'évaluation
- PresentationDocument67 pagesPresentationNagarjuna Reddy MPas encore d'évaluation
- Research Paper Summary Knowledge GraphsDocument1 pageResearch Paper Summary Knowledge GraphsTrust KaguraPas encore d'évaluation
- CEN ISO TR 17844 (2004) (E) CodifiedDocument7 pagesCEN ISO TR 17844 (2004) (E) CodifiedOerroc Oohay0% (1)
- Installation, and Maintenance Manual For Gas Fired, Wall-Hung BoilersDocument24 pagesInstallation, and Maintenance Manual For Gas Fired, Wall-Hung Boilersca3accoPas encore d'évaluation
- Swaroop (1) ResumeDocument4 pagesSwaroop (1) ResumeKrishna SwarupPas encore d'évaluation
- Model Space & Layout (Paper) SpaceDocument7 pagesModel Space & Layout (Paper) SpaceIonela Lioara TutaPas encore d'évaluation
- LAB3Document5 pagesLAB3Kaishavi UmrethwalaPas encore d'évaluation
- Chapter 3 - Bending MembersDocument41 pagesChapter 3 - Bending MembersSuhailah SuhaimiPas encore d'évaluation
- First Page PDFDocument1 pageFirst Page PDFNebojsa RedzicPas encore d'évaluation
- Flight Training Instruction: Naval Air Training CommandDocument174 pagesFlight Training Instruction: Naval Air Training CommandITLHAPN100% (1)
- Opoc Engine ReportDocument34 pagesOpoc Engine Reportapi-32792277367% (3)
- SMA Inverter Catalogue PDFDocument290 pagesSMA Inverter Catalogue PDFxodewaPas encore d'évaluation
- Laboratorio de Microondas - Medicion en Lineas de TX Usando Lineas RanuradasDocument5 pagesLaboratorio de Microondas - Medicion en Lineas de TX Usando Lineas RanuradasacajahuaringaPas encore d'évaluation
- Realizing Higher Productivity by Implementing Air Drilling Tech For Drilling Hard Top Hole Sections in Vindhyan FieldsDocument7 pagesRealizing Higher Productivity by Implementing Air Drilling Tech For Drilling Hard Top Hole Sections in Vindhyan FieldsLok Bahadur RanaPas encore d'évaluation
- Philips HeartStart MRX EMS BrochureDocument12 pagesPhilips HeartStart MRX EMS BrochureEnerspect Medical Solutions100% (1)
- Sika Cemflex 1Document3 pagesSika Cemflex 1rasasiPas encore d'évaluation
- Sample Acceptable Use Policy From Southern Regional High SchoolDocument4 pagesSample Acceptable Use Policy From Southern Regional High Schoolapi-356000194Pas encore d'évaluation
- Indian Standard: Stationary Valve Regulated Lead Acid Batteries - SpecificationDocument12 pagesIndian Standard: Stationary Valve Regulated Lead Acid Batteries - Specificationmukesh_kht1Pas encore d'évaluation
- A Research Submitted To: Student ResearchersDocument4 pagesA Research Submitted To: Student ResearchersDorothy Ann AllurinPas encore d'évaluation
- Advance Java Sem 5Document18 pagesAdvance Java Sem 5Gunjan Pratim JadhavPas encore d'évaluation
- American Woodworker 163 2012-2013 PDFDocument76 pagesAmerican Woodworker 163 2012-2013 PDFkaskdos100% (1)
- Vocational Training Report 3Document37 pagesVocational Training Report 3Suraj sahuPas encore d'évaluation
- Bangkok-Singapore CDM JournalDocument20 pagesBangkok-Singapore CDM JournalvasidhartaPas encore d'évaluation
- 3600 2 TX All Rounder Rotary Brochure India enDocument2 pages3600 2 TX All Rounder Rotary Brochure India ensaravananknpcPas encore d'évaluation
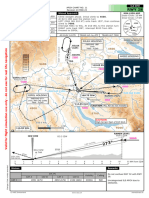
- LSZH Apch11 Rwy28 IlsDocument1 pageLSZH Apch11 Rwy28 Ilssamykarim2009Pas encore d'évaluation