Vous aimerez peut-être aussi
- Me MRK 18 Topic1Document62 pagesMe MRK 18 Topic1Radhe Bihari JhaPas encore d'évaluation
- Chapter 2 Spatial Descriptions and TransformationsDocument99 pagesChapter 2 Spatial Descriptions and TransformationsKeith wongPas encore d'évaluation
- Technology CAD For VLSI Design: Anindya Sundar DharDocument21 pagesTechnology CAD For VLSI Design: Anindya Sundar DharThi NguyenPas encore d'évaluation
- Introduction To ROBOTICS: Robot Kinematics IIDocument46 pagesIntroduction To ROBOTICS: Robot Kinematics IIsureshbtPas encore d'évaluation
- Push-Over Analysis For Seismic Performance Evaluation of RC Frame Structures. Computer ProgramsDocument13 pagesPush-Over Analysis For Seismic Performance Evaluation of RC Frame Structures. Computer ProgramsGegee_6111Pas encore d'évaluation
- Aubo I10 Brochure 2019 PDFDocument6 pagesAubo I10 Brochure 2019 PDFMiro Mirach PremrlPas encore d'évaluation
- Yasnac I80m AppendixDocument339 pagesYasnac I80m AppendixsunhuynhPas encore d'évaluation
- Yasnac I80m CNC System Appendix PDFDocument339 pagesYasnac I80m CNC System Appendix PDFobsidianghost100% (1)
- Featureengineering 171206213206Document45 pagesFeatureengineering 171206213206seibpPas encore d'évaluation
- Tentang VlsiDocument29 pagesTentang VlsiyoniazharPas encore d'évaluation
- AE3211-I Systems Engineering and Aerospace Design Lateral-Directional RequirementsDocument69 pagesAE3211-I Systems Engineering and Aerospace Design Lateral-Directional RequirementsfuckPas encore d'évaluation
- 700BT DS 20220826Document28 pages700BT DS 20220826Reyna SafillaPas encore d'évaluation
- Robotics Engineering Department Binghamton UniversityDocument68 pagesRobotics Engineering Department Binghamton UniversityRavinder Reddy SimalaPas encore d'évaluation
- Industrial Robot Manipulators: Industrial Applications of RobotsDocument7 pagesIndustrial Robot Manipulators: Industrial Applications of RobotsSHIVAMPas encore d'évaluation
- Industrial RoboticsDocument28 pagesIndustrial RoboticsPreethish GuhaPas encore d'évaluation
- Industrial Robot Manipulators: Industrial Applications of RobotsDocument7 pagesIndustrial Robot Manipulators: Industrial Applications of RobotsSHIVAMPas encore d'évaluation
- Mechanics of Machining: On Tool GeometryDocument16 pagesMechanics of Machining: On Tool GeometryEthan HuntPas encore d'évaluation
- Robot Kinematics LECTURE 1Document36 pagesRobot Kinematics LECTURE 1Samuel AdenijiPas encore d'évaluation
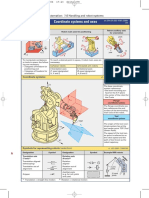
- Mechanical and Metal Trades Handbook 378 enDocument1 pageMechanical and Metal Trades Handbook 378 enTrevor SalazarPas encore d'évaluation
- Missile Launcher System Design and AnalysisDocument18 pagesMissile Launcher System Design and AnalysisShubham DeepPas encore d'évaluation
- High Precision Positioning for Silicon Photonics AlignmentDocument28 pagesHigh Precision Positioning for Silicon Photonics AlignmentMobile SunPas encore d'évaluation
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaPas encore d'évaluation
- Researches On Improving The Manufacturing Accuracy of CNC Cutting MachinesDocument5 pagesResearches On Improving The Manufacturing Accuracy of CNC Cutting MachinesAgus GunawanPas encore d'évaluation
- ME L21 RootLocusLagDocument5 pagesME L21 RootLocusLagRezkodaPas encore d'évaluation
- Lang PointPillars Fast Encoders For Object Detection From Point Clouds CVPR 2019 PaperDocument9 pagesLang PointPillars Fast Encoders For Object Detection From Point Clouds CVPR 2019 Paper姜峰Pas encore d'évaluation
- Bruce AdvancedVisionGuidedRoboticsDocument82 pagesBruce AdvancedVisionGuidedRoboticsPedro SolPas encore d'évaluation
- Robotics: Dr. Omar Salah Eldin MahmoudDocument33 pagesRobotics: Dr. Omar Salah Eldin Mahmouddarthvader909Pas encore d'évaluation
- 27 AdvancedVisionGuidedRobotics DavidBruceDocument72 pages27 AdvancedVisionGuidedRobotics DavidBrucenefenPas encore d'évaluation
- Robot Kinematics: Dr.S.Kalaimagal Ceg Campus Anna University ChennaiDocument84 pagesRobot Kinematics: Dr.S.Kalaimagal Ceg Campus Anna University ChennaiKarnataka TourPas encore d'évaluation
- Escalators MaintenanceDocument2 pagesEscalators MaintenanceMohamed Ahmed ElFekyPas encore d'évaluation
- Conquer! Matematik - Buku 1 - Tingkatan 3Document95 pagesConquer! Matematik - Buku 1 - Tingkatan 3Qistina BalqisPas encore d'évaluation
- PI White Paper Nexline Linear Piezo Motor TIS CDocument16 pagesPI White Paper Nexline Linear Piezo Motor TIS CHectorRelosPas encore d'évaluation
- Gps - MBD ????: Geometrical Product Specification - Model-Based-DefinitionDocument17 pagesGps - MBD ????: Geometrical Product Specification - Model-Based-Definitionsimon HunagPas encore d'évaluation
- Company Project Sheet No Revision: Section B-B Select Input UnitDocument4 pagesCompany Project Sheet No Revision: Section B-B Select Input UnitAkbar August IndhamaPas encore d'évaluation
- On Single Point Tool Geometry: Indian Institute of Technology DelhiDocument16 pagesOn Single Point Tool Geometry: Indian Institute of Technology DelhiDhananjay PatwariPas encore d'évaluation
- SP18368 Automotive Radar Comparison 2018 Sample 2Document33 pagesSP18368 Automotive Radar Comparison 2018 Sample 2Chipisgood YuPas encore d'évaluation
- Module 01 - IntroductionDocument37 pagesModule 01 - Introductionneelesh2k5Pas encore d'évaluation
- Water System Optimization Concepts and MethodsDocument24 pagesWater System Optimization Concepts and MethodsKeyurPas encore d'évaluation
- Mechanics of Solids: Shearing Stresses in Beams and Thin-Walled MembersDocument23 pagesMechanics of Solids: Shearing Stresses in Beams and Thin-Walled MembersZabid UllahPas encore d'évaluation
- Gantry Application: MELSERVO-J4 SolutionsDocument4 pagesGantry Application: MELSERVO-J4 SolutionsFitra VertikalPas encore d'évaluation
- Obot Subsystems and Obot Subsystems and Classifications ClassificationsDocument4 pagesObot Subsystems and Obot Subsystems and Classifications ClassificationsIvan AvramovPas encore d'évaluation
- (Speaker Dong Yi) Fundamental of Protection Practice For Power Distribution NetworkDocument34 pages(Speaker Dong Yi) Fundamental of Protection Practice For Power Distribution NetworksulphurdioxidePas encore d'évaluation
- Rap Passive Systems 2017Document64 pagesRap Passive Systems 2017Ikie BariePas encore d'évaluation
- Mathematical Model in PhotogrammetryDocument51 pagesMathematical Model in PhotogrammetryDelasdriana WiharjaPas encore d'évaluation
- Robot KinematicsDocument84 pagesRobot KinematicsElumalai BoominathanPas encore d'évaluation
- Ecc302a 22Document18 pagesEcc302a 22prakhar vishwakarmaPas encore d'évaluation
- Vibro Acoustic Analysis With Flux and Opti Struct FINALDocument31 pagesVibro Acoustic Analysis With Flux and Opti Struct FINALEnmel Martínez BejaranoPas encore d'évaluation
- Lecture 1.3 - Week 2 Wednesday - Kinematics and KineticsDocument58 pagesLecture 1.3 - Week 2 Wednesday - Kinematics and KineticsAmala CuganesanPas encore d'évaluation
- ME L19 RootLocusMultiparaDocument4 pagesME L19 RootLocusMultiparaRezkodaPas encore d'évaluation
- Electromagnetic Fields: Subject PCC-EE - 216G Semester: VIDocument86 pagesElectromagnetic Fields: Subject PCC-EE - 216G Semester: VInikitaPas encore d'évaluation
- Class CM 714 1Document32 pagesClass CM 714 1Tayyab AttariPas encore d'évaluation
- Vector Algebra and Calculus ReviewDocument14 pagesVector Algebra and Calculus ReviewSofia OrjuelaPas encore d'évaluation
- Study On Repetitive PID Control of Linear Motor in Wafer Stage of LithographyDocument5 pagesStudy On Repetitive PID Control of Linear Motor in Wafer Stage of LithographyAyman IsmailPas encore d'évaluation
- Manipulators: Degrees of FreedomDocument5 pagesManipulators: Degrees of Freedomapi-19801502Pas encore d'évaluation
- Vertical Virtual SectorizationDocument15 pagesVertical Virtual SectorizationWided AhmadiPas encore d'évaluation
- Industrial RobotDocument21 pagesIndustrial Robotsubhdip_maiti5287100% (3)
- PV System Performance MonitoringDocument12 pagesPV System Performance Monitoringdreadknight22Pas encore d'évaluation
- Introduction to Applied Optics for EngineersD'EverandIntroduction to Applied Optics for EngineersÉvaluation : 5 sur 5 étoiles5/5 (2)
- E2-04 - Manipulator KinematicsDocument61 pagesE2-04 - Manipulator KinematicsTonny ThanhPas encore d'évaluation
- RobotDocument37 pagesRobotTonny ThanhPas encore d'évaluation
- 05 JacobianDocument82 pages05 JacobianTonny ThanhPas encore d'évaluation
- 03-Three Angle Rotation PDFDocument22 pages03-Three Angle Rotation PDFTonny ThanhPas encore d'évaluation
- 02 Robot AnatomyDocument35 pages02 Robot AnatomyTonny ThanhPas encore d'évaluation
- Physical property tablesDocument27 pagesPhysical property tablesIan Oscar Gomez HuamaniPas encore d'évaluation
- Drug Diffusion Rates in Membrane vs Monolithic SystemsDocument7 pagesDrug Diffusion Rates in Membrane vs Monolithic Systemszubin33333Pas encore d'évaluation
- Flow Around Cylinder With CirculationDocument27 pagesFlow Around Cylinder With CirculationchandwanivinayPas encore d'évaluation
- Bahria Foundation Colleges (North) Centralized Notes of Short Questions (F.B.I.S.E) Physics SSC-IDocument63 pagesBahria Foundation Colleges (North) Centralized Notes of Short Questions (F.B.I.S.E) Physics SSC-IZaheer AhmedPas encore d'évaluation
- Clutch Coupling Heavy Duty: SFC-500 Bearing MountedDocument2 pagesClutch Coupling Heavy Duty: SFC-500 Bearing MountedElectromatePas encore d'évaluation
- Adiabatic Technique For Energy Efficient Logic Circuits DesignDocument24 pagesAdiabatic Technique For Energy Efficient Logic Circuits Design07291a0461Pas encore d'évaluation
- 1Q - Week 1 Physical ScienceDocument23 pages1Q - Week 1 Physical ScienceJEBONIE TUBICEPas encore d'évaluation
- IB Chemistry - SL Topic 2 Questions 1. Species Number of Protons Number of Neutrons Number of ElectronsDocument19 pagesIB Chemistry - SL Topic 2 Questions 1. Species Number of Protons Number of Neutrons Number of ElectronsAimee KorantengPas encore d'évaluation
- Converting Sound Energy To Electric Energy: November 2012Document5 pagesConverting Sound Energy To Electric Energy: November 2012qasim shahPas encore d'évaluation
- Phy Proj Clas 12 CbseDocument16 pagesPhy Proj Clas 12 CbseNarmadha RameshPas encore d'évaluation
- 4 28 JULY 2017 A06 11 AUGUST 2017 Abenojar, Eubert Alfred L. Engr. Benny Marie B. Ensano Dela Cruz, Jefferson Gomez, Mary Rose M. Pereira, Christa Lynd ADocument8 pages4 28 JULY 2017 A06 11 AUGUST 2017 Abenojar, Eubert Alfred L. Engr. Benny Marie B. Ensano Dela Cruz, Jefferson Gomez, Mary Rose M. Pereira, Christa Lynd Ajeremias marticioPas encore d'évaluation
- Gozetas-06-Seismic Design of FoundDocument6 pagesGozetas-06-Seismic Design of FoundrolohePas encore d'évaluation
- Aalim Muhammed Salegh College of Engineering Department of Mechanical EngineeringDocument6 pagesAalim Muhammed Salegh College of Engineering Department of Mechanical EngineeringMaran ElangovanPas encore d'évaluation
- Physical Chemistry Examples for Second Year StudentsDocument22 pagesPhysical Chemistry Examples for Second Year StudentsZsolt Dürvanger100% (1)
- Distillation: Enthalpy Concentration Methods (HX) Diagram or Ponchon Savarit MethodDocument9 pagesDistillation: Enthalpy Concentration Methods (HX) Diagram or Ponchon Savarit MethodRose Dane Escobedo DiestaPas encore d'évaluation
- Digsilent Powerfactory: Technical Reference DocumentationDocument19 pagesDigsilent Powerfactory: Technical Reference DocumentationAlexPas encore d'évaluation
- Recent Developments in The Theory of Polar Continua, by Rastko StojanovicDocument344 pagesRecent Developments in The Theory of Polar Continua, by Rastko StojanovicBodan NedPas encore d'évaluation
- Shell and Tube Heat ExchangerDocument31 pagesShell and Tube Heat ExchangerDhiyyah Mardhiyyah100% (1)
- Magnetisum @kvpy - AspirantsDocument4 pagesMagnetisum @kvpy - AspirantssagarPas encore d'évaluation
- Tunnel NoiseDocument11 pagesTunnel Noisesylvestrew100% (1)
- FEA All FormulaDocument12 pagesFEA All FormulaVickraman SPas encore d'évaluation
- Principles of TurbomachineryDocument276 pagesPrinciples of TurbomachineryNavneet PAndePas encore d'évaluation
- Relative Acceleration (1) : From Relative Velocity Circular MotionDocument12 pagesRelative Acceleration (1) : From Relative Velocity Circular Motionkeremmerek1Pas encore d'évaluation
- Rr410202 Power Semiconductor DrivesDocument1 pageRr410202 Power Semiconductor DrivessivabharathamurthyPas encore d'évaluation
- Optical Gyroscope With Whispering Gallery Mode Optical CavitiesDocument6 pagesOptical Gyroscope With Whispering Gallery Mode Optical Cavitiesjalamia8796Pas encore d'évaluation
- Statics: Force Centroids of Masses, Areas, Lengths, and VolumesDocument5 pagesStatics: Force Centroids of Masses, Areas, Lengths, and Volumesvzimak2355Pas encore d'évaluation
- Binary Phase Diagram Key DetailsDocument13 pagesBinary Phase Diagram Key DetailsRohanPas encore d'évaluation
- Finder Relays Series 65Document5 pagesFinder Relays Series 65PT. Tunas Ruang MesinPas encore d'évaluation
- CH 30Document6 pagesCH 30djbechtelnl100% (1)
- Waves Transfer EnergyDocument40 pagesWaves Transfer EnergyGellirose S. Bantayan100% (1)