Vous aimerez peut-être aussi
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- IMC - SCR - Rev - E8 (42-02-7200E)Document449 pagesIMC - SCR - Rev - E8 (42-02-7200E)ElputoAmo XDPas encore d'évaluation
- Pneumatics Advanced Level WorkbookDocument0 pagePneumatics Advanced Level Workbooklojzemulec5966Pas encore d'évaluation
- Sinamics S120 - CU310 Shop ManualDocument47 pagesSinamics S120 - CU310 Shop ManualThomas Irwin Dsouza100% (1)
- EE208 Lab ManualDocument38 pagesEE208 Lab Manualsakib shaukatPas encore d'évaluation
- BOOK Ugural 15 Mechanical Design of Machine ComponentsDocument95 pagesBOOK Ugural 15 Mechanical Design of Machine ComponentsLeonel Bejar VelardePas encore d'évaluation
- 05 - Dynamic Simulations For Safety and Reliability and Efficient Operations - GautamDocument45 pages05 - Dynamic Simulations For Safety and Reliability and Efficient Operations - GautamCalPas encore d'évaluation
- Steckel Mill 1 PDFDocument178 pagesSteckel Mill 1 PDFSomnathNaskarPas encore d'évaluation
- Fau Dzi 2012Document6 pagesFau Dzi 2012Leonel Bejar VelardePas encore d'évaluation
- Laboratorio 3Document1 pageLaboratorio 3Leonel Bejar VelardePas encore d'évaluation
- Sae Technical Paper Series: Tankut Acarman and Umit OzgunerDocument9 pagesSae Technical Paper Series: Tankut Acarman and Umit OzgunerLeonel Bejar VelardePas encore d'évaluation
- Position and Compliance Control of A Pneumatic Muscle Actuated Manipulator For Enhanced SafetyDocument11 pagesPosition and Compliance Control of A Pneumatic Muscle Actuated Manipulator For Enhanced SafetyLeonel Bejar VelardePas encore d'évaluation
- Bob Row 1998Document11 pagesBob Row 1998Leonel Bejar VelardePas encore d'évaluation
- Activarlo en CMD - Windows 10Document1 pageActivarlo en CMD - Windows 10Leonel Bejar VelardePas encore d'évaluation
- KK KKKKKDocument1 pageKK KKKKKLeonel Bejar VelardePas encore d'évaluation
- IofgDocument1 pageIofgLeonel Bejar VelardePas encore d'évaluation
- B.Tech Syllabus Aero 7Document9 pagesB.Tech Syllabus Aero 7KhushiPas encore d'évaluation
- Advance Control AssignmentDocument14 pagesAdvance Control AssignmentAhad MunawarPas encore d'évaluation
- Exercise MPC1Document16 pagesExercise MPC1Ifrah AlamPas encore d'évaluation
- Signal - System - Ch2 (LTIV)Document42 pagesSignal - System - Ch2 (LTIV)Nigar QurbanovaPas encore d'évaluation
- Design Modeling and Fabrication of Twin Rotor Control SystemDocument68 pagesDesign Modeling and Fabrication of Twin Rotor Control SystemanampxPas encore d'évaluation
- Irjece: The PLC Based Design For The Air Compressor Control ProcessDocument5 pagesIrjece: The PLC Based Design For The Air Compressor Control ProcessabuthahirPas encore d'évaluation
- WinFACT 96 - ELWE-Lehrsysteme GMBHDocument8 pagesWinFACT 96 - ELWE-Lehrsysteme GMBHLuis Diego Saravia ChoquePas encore d'évaluation
- ROOT LOCUS ANALYSISDocument9 pagesROOT LOCUS ANALYSISGian Carlos ApolinarioPas encore d'évaluation
- Feedback and Control System: Engr. Gillert M. BongcacDocument124 pagesFeedback and Control System: Engr. Gillert M. BongcacNorePas encore d'évaluation
- Computer Science Textbook Solutions - 31Document30 pagesComputer Science Textbook Solutions - 31acc-expertPas encore d'évaluation
- IotDocument3 pagesIotnoisi80Pas encore d'évaluation
- Unified Maneuvering and Seakeeping TheoryDocument28 pagesUnified Maneuvering and Seakeeping TheoryGeoffjones4Pas encore d'évaluation
- GlossaryDocument10 pagesGlossarymazhar940Pas encore d'évaluation
- United States Patent (10) Patent No.: Us 7,229,250 B2: Mccallum Et Al. (45) Date of Patent: Jun. 12, 2007Document14 pagesUnited States Patent (10) Patent No.: Us 7,229,250 B2: Mccallum Et Al. (45) Date of Patent: Jun. 12, 2007Валентин ДимитровPas encore d'évaluation
- Real Time DC Water Tank Level Control Using Arduino Mega 2560Document6 pagesReal Time DC Water Tank Level Control Using Arduino Mega 2560Sam ArPas encore d'évaluation
- Brochure Controleurs 505 505XT Pour Turbines Vapeur 51506 ADocument6 pagesBrochure Controleurs 505 505XT Pour Turbines Vapeur 51506 AAziz TaziPas encore d'évaluation
- Optimal Control With Input Shaping For Input Tracking and Vibration Suppression of A Flexible Joint ManipulatorDocument17 pagesOptimal Control With Input Shaping For Input Tracking and Vibration Suppression of A Flexible Joint Manipulatormagdi elmalekPas encore d'évaluation
- IntroCtrlSys - Final Exam - 1st Semester - 1920 - Solution PDFDocument5 pagesIntroCtrlSys - Final Exam - 1st Semester - 1920 - Solution PDFTran Nguyen KhangPas encore d'évaluation
- Sem 6Document12 pagesSem 6Pronoy Kumar SinhaPas encore d'évaluation
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocument18 pagesFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending Systeml7aniPas encore d'évaluation
- The Legacy of George S. AxelbyDocument2 pagesThe Legacy of George S. AxelbyABET DTETIPas encore d'évaluation
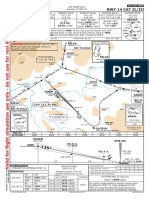
- LSZH App1 Ils14 PDFDocument1 pageLSZH App1 Ils14 PDFRadu Andrei MalicaPas encore d'évaluation
- Electrical Most Important 150 MCQ PDF For Vizag MT ExamDocument43 pagesElectrical Most Important 150 MCQ PDF For Vizag MT ExamNaveen KumarPas encore d'évaluation
- SR Manual eDocument213 pagesSR Manual eCesar TiPas encore d'évaluation