Vous aimerez peut-être aussi
- Deploying QoS for Cisco IP and Next Generation Networks: The Definitive GuideD'EverandDeploying QoS for Cisco IP and Next Generation Networks: The Definitive GuideÉvaluation : 5 sur 5 étoiles5/5 (2)
- Practical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsD'EverandPractical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsÉvaluation : 5 sur 5 étoiles5/5 (6)
- 21129364-001 r000 HST FrameRelay UsersGuideDocument82 pages21129364-001 r000 HST FrameRelay UsersGuideokisoundPas encore d'évaluation
- ABB RAPID Application - Manual Robot - Reference.interface (Woc)Document46 pagesABB RAPID Application - Manual Robot - Reference.interface (Woc)ildvcePas encore d'évaluation
- lmc058 45MANUAL - LMC058-HARDWAREDocument124 pageslmc058 45MANUAL - LMC058-HARDWAREwiraaPas encore d'évaluation
- Ethernet Modbus X80 Gateway Device Type Manager: User ManualDocument40 pagesEthernet Modbus X80 Gateway Device Type Manager: User ManualVladPas encore d'évaluation
- ManualOperacion CompoBusUnits PDFDocument401 pagesManualOperacion CompoBusUnits PDFSergio Eu CaPas encore d'évaluation
- W347-E1-06 c200hw cqm1-drt drt1Document381 pagesW347-E1-06 c200hw cqm1-drt drt1Vũ MinhPas encore d'évaluation
- Portmaster 4 User Manual Addendum: Lucent TechnologiesDocument64 pagesPortmaster 4 User Manual Addendum: Lucent TechnologiesNicholas KimPas encore d'évaluation
- Manual QUANTUM MPDocument172 pagesManual QUANTUM MPEdwin MaldonadoPas encore d'évaluation
- Zebra ZE500™: User GuideDocument170 pagesZebra ZE500™: User GuideСиниша КашићPas encore d'évaluation
- 3500/72M Recip Rod Position Monitor: Operation and Maintenance ManualDocument158 pages3500/72M Recip Rod Position Monitor: Operation and Maintenance ManualNOEMIPas encore d'évaluation
- ABB VFD EN - ACS320 - SFUM - A - A4 User ManualDocument44 pagesABB VFD EN - ACS320 - SFUM - A - A4 User ManualRahul GuptaPas encore d'évaluation
- FP5/GP5 Series User's Manual: Variable Torque Inverter (With Software Version 5110/5120 and Newer)Document101 pagesFP5/GP5 Series User's Manual: Variable Torque Inverter (With Software Version 5110/5120 and Newer)Waseem KhanPas encore d'évaluation
- En RETA-02 Um A PDFDocument112 pagesEn RETA-02 Um A PDFArmin ZaimovićPas encore d'évaluation
- VLT 5000 Syncpos Option: Mg.10.J4.02 - VLT Is A Registered Danfoss Trade MarkDocument176 pagesVLT 5000 Syncpos Option: Mg.10.J4.02 - VLT Is A Registered Danfoss Trade MarkAlexPas encore d'évaluation
- W345 E1 5 CJ1 AnalogDocument406 pagesW345 E1 5 CJ1 Analogวรพงษ์ กอชัชวาลPas encore d'évaluation
- S280 79 10cooper PDFDocument56 pagesS280 79 10cooper PDFWALTER QUIROZPas encore d'évaluation
- DVR E: Installation, Operation, and Maintenance ManualDocument56 pagesDVR E: Installation, Operation, and Maintenance ManualEng M ElseaidyPas encore d'évaluation
- E3 and E3 Plus Solid-State Overload RelayDocument230 pagesE3 and E3 Plus Solid-State Overload RelayfabianPas encore d'évaluation
- Novam SeriesDocument35 pagesNovam Serieshidraulica inteligentePas encore d'évaluation
- IPS Tempo: User ManualDocument262 pagesIPS Tempo: User ManualdevaseelanPas encore d'évaluation
- PRIMERGY TX200 S6 Server Operating ManualDocument126 pagesPRIMERGY TX200 S6 Server Operating ManualkodakdanielPas encore d'évaluation
- E3 and E3 Plus Solid-State Overload RelayDocument230 pagesE3 and E3 Plus Solid-State Overload Relaychaupha1Pas encore d'évaluation
- EtherNet/IP Embedded Switch TechnologyDocument94 pagesEtherNet/IP Embedded Switch TechnologyGianfranco VentrescaPas encore d'évaluation
- F4C PDFDocument52 pagesF4C PDFalvaroPas encore d'évaluation
- Ihm Schneider FDM - 121Document52 pagesIhm Schneider FDM - 121julian serranoPas encore d'évaluation
- VG+ Series 2 Software 14911Document241 pagesVG+ Series 2 Software 14911cj7man80Pas encore d'évaluation
- Stratix 8000 and Stratix 8300 Ethernet Managed Switches: User ManualDocument168 pagesStratix 8000 and Stratix 8300 Ethernet Managed Switches: User ManualKleisson MaltaPas encore d'évaluation
- ManualOperacion IDSensorUnits PDFDocument148 pagesManualOperacion IDSensorUnits PDFSergio Eu CaPas encore d'évaluation
- Rockewell Dynamix 1444-Um001 - En-P PDFDocument458 pagesRockewell Dynamix 1444-Um001 - En-P PDFronfrendPas encore d'évaluation
- Aten Es0152 Es0152p-User ManualDocument480 pagesAten Es0152 Es0152p-User ManualWindi RahmadiniPas encore d'évaluation
- FM-60 Flexible Multiplexer User's Manual: Version A2.0, February-12-2004Document257 pagesFM-60 Flexible Multiplexer User's Manual: Version A2.0, February-12-2004Saptarshi ChatterjeePas encore d'évaluation
- W266 E1 09+CompoBus S+OperManualDocument423 pagesW266 E1 09+CompoBus S+OperManualMiguel_9862Pas encore d'évaluation
- Modicon Quantum 140CRA31908 Adapter Module Installation and Configuration GuideDocument136 pagesModicon Quantum 140CRA31908 Adapter Module Installation and Configuration GuideSamdan NamhaisurenPas encore d'évaluation
- Primergy Cx272 S1 Server Node: Operating ManualDocument56 pagesPrimergy Cx272 S1 Server Node: Operating Manualemartemm1503Pas encore d'évaluation
- Altivar 61/71: Variable Speed Drives For Synchronous and Asynchronous Motors Profinet Communication Manual VW3A3327Document84 pagesAltivar 61/71: Variable Speed Drives For Synchronous and Asynchronous Motors Profinet Communication Manual VW3A3327memoman73Pas encore d'évaluation
- 65K110FTTP 29a PDFDocument412 pages65K110FTTP 29a PDFguillermo100% (1)
- w377 Cpm2c-s100c s110c (-DRT) Operation Manual enDocument269 pagesw377 Cpm2c-s100c s110c (-DRT) Operation Manual enBruno LeitePas encore d'évaluation
- DG1 Communication Manual MN040010EN PDFDocument195 pagesDG1 Communication Manual MN040010EN PDFAmey DhaygudePas encore d'évaluation
- LB Aw ns12 Man - enDocument52 pagesLB Aw ns12 Man - enWaldir Donatti JuniorPas encore d'évaluation
- ACS310 Short ManualDocument40 pagesACS310 Short ManualJPas encore d'évaluation
- CCOTF Schneider ElectricDocument64 pagesCCOTF Schneider ElectricRizki MuladiPas encore d'évaluation
- PLC MD300 PDFDocument108 pagesPLC MD300 PDFerbarragansPas encore d'évaluation
- 4x4 / 8x8 HDMI Matrix Switch With Scaler VM5404H / VM5808H User ManualDocument118 pages4x4 / 8x8 HDMI Matrix Switch With Scaler VM5404H / VM5808H User ManualYusuf AhmadiPas encore d'évaluation
- Hetronic RX bms2 PWM Operator S Manual 21Document21 pagesHetronic RX bms2 PWM Operator S Manual 21Akhmad FauziPas encore d'évaluation
- Modicon TM4: Expansion Modules Programming GuideDocument100 pagesModicon TM4: Expansion Modules Programming GuidemauroorsojrPas encore d'évaluation
- Aparat US Petrea SCOUT 55Document64 pagesAparat US Petrea SCOUT 55Valentina BrumaPas encore d'évaluation
- User Manual Fm60 New VersionDocument257 pagesUser Manual Fm60 New Versiondo thuongPas encore d'évaluation
- SCH VsdSpeedstar2000 UmDocument93 pagesSCH VsdSpeedstar2000 Umyasser_nasef5399Pas encore d'évaluation
- LCD KVM Switch CL5708 / CL5716 User ManualDocument95 pagesLCD KVM Switch CL5708 / CL5716 User Manualtuandanhbk10Pas encore d'évaluation
- Z909-E1-01 Cs - CJ Eip21 Ethernet Ip UnitsDocument77 pagesZ909-E1-01 Cs - CJ Eip21 Ethernet Ip UnitsfernandoPas encore d'évaluation
- D2 - DCM Data Communications ModuleDocument70 pagesD2 - DCM Data Communications ModuleSilvia Del RioPas encore d'évaluation
- Abb Drives: User'S Manual Controlnet Adapter Module Rcna-01Document60 pagesAbb Drives: User'S Manual Controlnet Adapter Module Rcna-01rashidPas encore d'évaluation
- 1441 Um003a en P PDFDocument32 pages1441 Um003a en P PDFCarlos MPas encore d'évaluation
- Manual Servo 5100 Allen BradleyDocument540 pagesManual Servo 5100 Allen BradleyGERARDOPas encore d'évaluation
- DL405 Data Communications ModuleDocument46 pagesDL405 Data Communications Modulejvcoral321100% (1)
- Operation Manual: 4-Channel Counter UnitDocument133 pagesOperation Manual: 4-Channel Counter Unityassine123Pas encore d'évaluation
- (W266 E1 07) CompoBus - SDocument401 pages(W266 E1 07) CompoBus - SMiguel CarvalhoPas encore d'évaluation
- Zmcs-204-591 - 500-001 - Rev 0 - Safety Plan (Life Saving)Document1 pageZmcs-204-591 - 500-001 - Rev 0 - Safety Plan (Life Saving)majdirossrossPas encore d'évaluation
- 2012 Stimulaton VesselsDocument2 pages2012 Stimulaton VesselsmajdirossrossPas encore d'évaluation
- X 6909 e 00Document30 pagesX 6909 e 00majdirossrossPas encore d'évaluation
- Chief and Second Engineer Model Course RevisedDocument204 pagesChief and Second Engineer Model Course Revisedvideo saru50% (4)
- Stab WorksheetDocument1 412 pagesStab WorksheetmajdirossrossPas encore d'évaluation
- GMDSS Model Course Revised for Radio Regulations 2012Document359 pagesGMDSS Model Course Revised for Radio Regulations 2012Ganesh Kode83% (6)
- Short Circuit Current Calculation of DG Synch Panel 1-6-14Document3 pagesShort Circuit Current Calculation of DG Synch Panel 1-6-14Aerielle DesameroPas encore d'évaluation
- Sorj Dec Jan14Document92 pagesSorj Dec Jan14majdirossrossPas encore d'évaluation
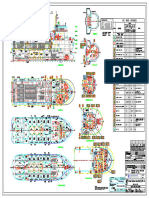
- Pump Room Details Rev 0Document1 pagePump Room Details Rev 0majdirossrossPas encore d'évaluation
- Guidelines For Humane Handling, Transport and Slaughter of LivestockDocument24 pagesGuidelines For Humane Handling, Transport and Slaughter of LivestockmajdirossrossPas encore d'évaluation
- GMDSS Model Course Revised for Radio Regulations 2012Document359 pagesGMDSS Model Course Revised for Radio Regulations 2012Ganesh Kode83% (6)
- CattleHandbookApril 2008Document70 pagesCattleHandbookApril 2008majdirossrossPas encore d'évaluation
- List of IMO Model CoursesDocument16 pagesList of IMO Model CoursesWilliam JacksonPas encore d'évaluation
- Chief and Second Engineer Model Course RevisedDocument204 pagesChief and Second Engineer Model Course Revisedvideo saru50% (4)
- Cargo Operations PolicyDocument1 pageCargo Operations PolicymajdirossrossPas encore d'évaluation
- RSS PartA 2014-07 PDFDocument304 pagesRSS PartA 2014-07 PDFCastoriadisPas encore d'évaluation
- Fleet Section 4 - CommunicationsDocument5 pagesFleet Section 4 - CommunicationsmajdirossrossPas encore d'évaluation
- Imo Model Course,: Officer in Charge of A Navigational WatchDocument11 pagesImo Model Course,: Officer in Charge of A Navigational WatchmajdirossrossPas encore d'évaluation
- Fleet Section 5 - Marine Operations Menu PDFDocument1 pageFleet Section 5 - Marine Operations Menu PDFmajdirossrossPas encore d'évaluation
- VMS Accounting and Wages AdministrationDocument27 pagesVMS Accounting and Wages Administrationmajdirossross100% (1)
- Methods of Longitudinal Weight DistributionDocument24 pagesMethods of Longitudinal Weight DistributionWafaà WafaPas encore d'évaluation
- Fleet Section 2 - Principal ResponsibilitiesDocument4 pagesFleet Section 2 - Principal ResponsibilitiesmajdirossrossPas encore d'évaluation
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Fine Woodworking - August 2015 USA PDFDocument92 pagesFine Woodworking - August 2015 USA PDFLuis LoureiroPas encore d'évaluation
- Shipweight in 30 MinutesDocument25 pagesShipweight in 30 MinutesmajdirossrossPas encore d'évaluation
- HomeURs PDFDocument1 pageHomeURs PDFmajdirossrossPas encore d'évaluation
- d6.1 - Ship-Structure - Final PDFDocument131 pagesd6.1 - Ship-Structure - Final PDFAhly1970Pas encore d'évaluation
- Ce T23GDocument66 pagesCe T23GmajdirossrossPas encore d'évaluation
- UIMODUDocument40 pagesUIMODUmajdirossrossPas encore d'évaluation
- UIPASSUBDocument3 pagesUIPASSUBmajdirossrossPas encore d'évaluation
- 02 Antennas & PropagationDocument719 pages02 Antennas & PropagationAngel CelestialPas encore d'évaluation
- ASTM D4849-13e1Document12 pagesASTM D4849-13e1Sandra LopesPas encore d'évaluation
- OptoModules SolidStateRelaysDocument44 pagesOptoModules SolidStateRelaysalltheloveintheworldPas encore d'évaluation
- Micom P341Document425 pagesMicom P341Vel MuruganPas encore d'évaluation
- Physics 10thDocument8 pagesPhysics 10thAbdiPas encore d'évaluation
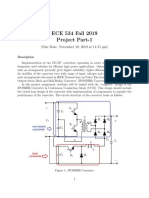
- ECE 534 Project 1 F19Document6 pagesECE 534 Project 1 F19JAY CHHEDAPas encore d'évaluation
- Chapter 3Document31 pagesChapter 3che syakirPas encore d'évaluation
- Panasonic NN-C994S Inverter Repair KitDocument9 pagesPanasonic NN-C994S Inverter Repair Kitbobrickner45Pas encore d'évaluation
- Haefely - V Type Impulse GeneratorDocument11 pagesHaefely - V Type Impulse GeneratorAno035Pas encore d'évaluation
- Extraction, Isolation and Evaluation of Pitera From Fermented Rice Water and Its Incorporation As Active in Bi-Phasic Makeup RemovalDocument9 pagesExtraction, Isolation and Evaluation of Pitera From Fermented Rice Water and Its Incorporation As Active in Bi-Phasic Makeup RemovalSyed Iftekhar AlamPas encore d'évaluation
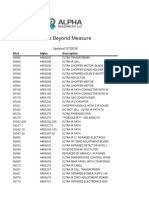
- Value Beyond Measure Eltra Parts CatalogDocument14 pagesValue Beyond Measure Eltra Parts CatalogAliSultanPas encore d'évaluation
- IR Jammer Infrared Remote Control Jammer v1.0.2Document24 pagesIR Jammer Infrared Remote Control Jammer v1.0.2Med50% (2)
- Lahore Converter Station Operation Regulations Volume 1 (Equipment Overview) .Zh-CN.en (1) -拉合尔换流站运行规程第1分册(设备概况).Zh-CN.enDocument185 pagesLahore Converter Station Operation Regulations Volume 1 (Equipment Overview) .Zh-CN.en (1) -拉合尔换流站运行规程第1分册(设备概况).Zh-CN.enUsama ZafarPas encore d'évaluation
- BSC in EEE SyllabusDocument33 pagesBSC in EEE SyllabusSarkar Mohammad Masud -Bin-AliPas encore d'évaluation
- Testing by Ghosh PDFDocument37 pagesTesting by Ghosh PDFRajendrakumarPas encore d'évaluation
- R22 - D-STATCOM For Power Quality ImprovementDocument6 pagesR22 - D-STATCOM For Power Quality ImprovementAli Al-QattanPas encore d'évaluation
- Component Tester Complete ManualDocument131 pagesComponent Tester Complete ManualwdummertPas encore d'évaluation
- JVC C-13CL3Document2 pagesJVC C-13CL3James ArlanttPas encore d'évaluation
- Subject Title: Applied Electronics Subject Code: 22329: 3 Hours / 70 MarksDocument20 pagesSubject Title: Applied Electronics Subject Code: 22329: 3 Hours / 70 Marksjuber mullaPas encore d'évaluation
- The Design and Construction of FM Radio TransmitterDocument43 pagesThe Design and Construction of FM Radio TransmitterDarex OnahPas encore d'évaluation
- Wireless World 1948 09Document42 pagesWireless World 1948 09Jan PranPas encore d'évaluation
- Power System 1 Lab ManualDocument41 pagesPower System 1 Lab ManualSufiSayyidZakiyah100% (1)
- STA543SADocument23 pagesSTA543SAbrainerkeeperPas encore d'évaluation
- Design and Simulation of PFC Circuit For AC/DC Converter Based On PWM Boost RegulatorDocument5 pagesDesign and Simulation of PFC Circuit For AC/DC Converter Based On PWM Boost RegulatorSEP-PublisherPas encore d'évaluation
- Modeling of Metal Oxide Surge Arresters 1992Document8 pagesModeling of Metal Oxide Surge Arresters 1992Marcelo VillarPas encore d'évaluation
- RT412 TM EN HWA 4v2 PDFDocument45 pagesRT412 TM EN HWA 4v2 PDFJhonatan TerraPas encore d'évaluation
- BHEL Model Question Paper (Answers Updated) Senthil4u's WeblogDocument81 pagesBHEL Model Question Paper (Answers Updated) Senthil4u's Webloganjanikuma100% (1)
- Automatic Rain Detector PDFDocument19 pagesAutomatic Rain Detector PDFPrashanthPas encore d'évaluation
- High Volume Armature Testing: Lance Straughn Slaughter CompanyDocument10 pagesHigh Volume Armature Testing: Lance Straughn Slaughter Companyronald allan liviocoPas encore d'évaluation
- Course: Alternating Current: Presented by Kailash SharmaDocument25 pagesCourse: Alternating Current: Presented by Kailash SharmaHJPas encore d'évaluation