Vous aimerez peut-être aussi
- Rigging Arrangement: Surface Facilities Project SUBAN#24Document1 pageRigging Arrangement: Surface Facilities Project SUBAN#24imam susantoPas encore d'évaluation
- Kurva HidrostatisDocument1 pageKurva HidrostatisMoch ArdiansyahPas encore d'évaluation
- WCB 113.28.1120 Swing Circle Gear Turntable Slewing Ring BearingDocument1 pageWCB 113.28.1120 Swing Circle Gear Turntable Slewing Ring BearingWCB BEARINGPas encore d'évaluation
- Some Practical Aspects of Ship Launching: Part 1. Starting and CheckingDocument14 pagesSome Practical Aspects of Ship Launching: Part 1. Starting and CheckingKaung Myat HeinPas encore d'évaluation
- Crane Load Chart-D-008 R2 (2) 52Document1 pageCrane Load Chart-D-008 R2 (2) 52sdPas encore d'évaluation
- Technical and Economic Analysis of Ship Launching With Slipway and Airbag KM. Sabuk Nusantara 72 in PT. Janata Marina Indah Shipyard SemarangDocument7 pagesTechnical and Economic Analysis of Ship Launching With Slipway and Airbag KM. Sabuk Nusantara 72 in PT. Janata Marina Indah Shipyard SemarangAmit RanjanPas encore d'évaluation
- Wind/Diesel Power Systems Basics and ExamplesDocument40 pagesWind/Diesel Power Systems Basics and ExamplesMg MgPas encore d'évaluation
- Braking Resistor UnitDocument11 pagesBraking Resistor UnitpwmvsiPas encore d'évaluation
- Mechanical Stopper - Structure CAlculationDocument9 pagesMechanical Stopper - Structure CAlculationik43207Pas encore d'évaluation
- An Analysis of The NREL 5 MW Semisubmersible Wind Turbine Using Data From Morro BayDocument22 pagesAn Analysis of The NREL 5 MW Semisubmersible Wind Turbine Using Data From Morro BayDantheManPas encore d'évaluation
- Braking ResistorDocument14 pagesBraking ResistorMPCReaderPas encore d'évaluation
- Padeye Design AnalysisDocument8 pagesPadeye Design AnalysisMyatmyat SwewinPas encore d'évaluation
- IEC ElectricPowerSystemsDocument30 pagesIEC ElectricPowerSystemsYayan Putra AmanerPas encore d'évaluation
- Us Eutectic CDP Wear Plate Oct2013Document4 pagesUs Eutectic CDP Wear Plate Oct2013Vitor Rigueira de GodoyPas encore d'évaluation
- DNV Oss 101 Rules For Classification of Offshore Drilling and Support Units April 2009Document124 pagesDNV Oss 101 Rules For Classification of Offshore Drilling and Support Units April 2009learsipi061Pas encore d'évaluation
- Calculation For Hull Strength Construction in Offshore Structures PDFDocument10 pagesCalculation For Hull Strength Construction in Offshore Structures PDFcxb07164Pas encore d'évaluation
- Direct and Inverse Kinematics of Stewart Platform Applied To Offshore Cargo Transfer SimulationDocument7 pagesDirect and Inverse Kinematics of Stewart Platform Applied To Offshore Cargo Transfer SimulationMuebles SanabriaPas encore d'évaluation
- Tractel Price List 2016 LR PDFDocument173 pagesTractel Price List 2016 LR PDFtangouzePas encore d'évaluation
- Braking ResistorDocument10 pagesBraking ResistorJoa QuispePas encore d'évaluation
- DNV Marine Operations' Rules For Subsea Lifting: New Simplified Method For Prediction of Hydrodynamic ForcesDocument48 pagesDNV Marine Operations' Rules For Subsea Lifting: New Simplified Method For Prediction of Hydrodynamic ForcesGeorge BabyPas encore d'évaluation
- Offshore & Structural Plate SizeDocument4 pagesOffshore & Structural Plate Sizelaleye_olumidePas encore d'évaluation
- Calculation Barge Stab PDFDocument31 pagesCalculation Barge Stab PDFMartinus OktaPas encore d'évaluation
- Lab 3 CounterbalanceDocument6 pagesLab 3 CounterbalanceAmol MiglaniPas encore d'évaluation
- SBM-19-1018-202 - PROPELLER DETAIL - Rev-02 PDFDocument1 pageSBM-19-1018-202 - PROPELLER DETAIL - Rev-02 PDFMahendra SunarPas encore d'évaluation
- Double Bollards - Din 82607Document1 pageDouble Bollards - Din 82607Anca GeaninaPas encore d'évaluation
- Marine LiftingDocument17 pagesMarine LiftingMarian LazarPas encore d'évaluation
- Lifting Lug Stress - Typ FactorsDocument1 pageLifting Lug Stress - Typ FactorsDipak ZopePas encore d'évaluation
- Data Sheet SAE 100 R2AT: Hose ConstructionDocument1 pageData Sheet SAE 100 R2AT: Hose ConstructionadhityaPas encore d'évaluation
- Roger Caffin's Catenary Curve CalculatorDocument6 pagesRoger Caffin's Catenary Curve Calculatorviggen_one2002Pas encore d'évaluation
- S Davit Winches DatasheetDocument4 pagesS Davit Winches Datasheetmustafasenbagci3693Pas encore d'évaluation
- Hardness Conversion Table - ..Document3 pagesHardness Conversion Table - ..Jaidev ShahPas encore d'évaluation
- 3.2 Design Development of Corrugated BulkheadsDocument17 pages3.2 Design Development of Corrugated BulkheadsТеодора Недялкова100% (1)
- LOP For Re-Install FWP B With NPP Nusantara Rev.1Document13 pagesLOP For Re-Install FWP B With NPP Nusantara Rev.1Akbar RahmansyahPas encore d'évaluation
- Ballast Free ShipsDocument18 pagesBallast Free ShipsassddfPas encore d'évaluation
- PHD Thesis Pepijn de Jong - FinalDocument280 pagesPHD Thesis Pepijn de Jong - FinalsiswoutPas encore d'évaluation
- Station KeepingDocument67 pagesStation KeepingSagar MhatrePas encore d'évaluation
- CIW TIREADS JRD ANGLE PROJECTI ON DIMENSIONSTHODTINDIVAL TOLERAKCDocument2 pagesCIW TIREADS JRD ANGLE PROJECTI ON DIMENSIONSTHODTINDIVAL TOLERAKCAnkit GeorgePas encore d'évaluation
- 750mm X-Beam CalculationDocument13 pages750mm X-Beam CalculationapollocradlesPas encore d'évaluation
- 1101 Semi Float Vessel PosterDocument1 page1101 Semi Float Vessel PosterYash SinghPas encore d'évaluation
- Cppbdn5101 UagDocument5 pagesCppbdn5101 Uagkarate hotPas encore d'évaluation
- PT Gunanusa Utama Fabricators: Calculation SheetDocument29 pagesPT Gunanusa Utama Fabricators: Calculation SheetRiandi HartartoPas encore d'évaluation
- Equipment Number CalculationDocument3 pagesEquipment Number CalculationENG PTBBSPas encore d'évaluation
- BLH WeighingHandwookDocument59 pagesBLH WeighingHandwookchandushar1604Pas encore d'évaluation
- DNV's New Simplified Method for Subsea Lifting ForcesDocument48 pagesDNV's New Simplified Method for Subsea Lifting ForcesSi Rerumpai LautPas encore d'évaluation
- Boskalis Heavy Lift Vessels BrochureDocument10 pagesBoskalis Heavy Lift Vessels BrochureRalf TholenPas encore d'évaluation
- 3 Loads and StructuresDocument22 pages3 Loads and StructuresG.O.D 7Pas encore d'évaluation
- Offshore Platform Tutorial: Introduction to SACS Finite Element Analysis SoftwareDocument13 pagesOffshore Platform Tutorial: Introduction to SACS Finite Element Analysis Softwarenazeer_mohd100% (2)
- Holmen Arctic Updated On 2011-08-03Document2 pagesHolmen Arctic Updated On 2011-08-03HASHMI MAHMOODPas encore d'évaluation
- Shipbuilding Drawing-II SBT-8054 T P C 0 9 3Document2 pagesShipbuilding Drawing-II SBT-8054 T P C 0 9 3reaz uddin100% (1)
- Tow Line Loadings On Ship Mooring FittingsDocument3 pagesTow Line Loadings On Ship Mooring FittingsEmmaPas encore d'évaluation
- Specs - Belt Conveyor 1 ProjectDocument7 pagesSpecs - Belt Conveyor 1 ProjectEdson Valter VillalunaPas encore d'évaluation
- ACE Platforms 0801Document4 pagesACE Platforms 0801Ruslan ZakirovPas encore d'évaluation
- Group Work - Case ChemxDocument11 pagesGroup Work - Case Chemxwerya aghamiriPas encore d'évaluation
- API WSD Punch CodeCheckDocument7 pagesAPI WSD Punch CodeCheckKhải TrươngPas encore d'évaluation
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsD'EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsPas encore d'évaluation
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityD'EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityPas encore d'évaluation
- A Framework For Crane Selection in Large-Scale Industrial Construction ProjectsDocument9 pagesA Framework For Crane Selection in Large-Scale Industrial Construction ProjectsAnggy de RinconPas encore d'évaluation
- 1 20 20effects 20of 20dataset 20characteristics 20on 20the 20performance 20of 20fatigue 20detectionDocument18 pages1 20 20effects 20of 20dataset 20characteristics 20on 20the 20performance 20of 20fatigue 20detectioncstoajfuPas encore d'évaluation
- 90497-Article Text-191902-1-10-20170127Document22 pages90497-Article Text-191902-1-10-20170127Ajay lokhandePas encore d'évaluation
- Investigation On The Design of Double-Stage Scissor Lifts Based On Parametric Dimension TechniqueDocument19 pagesInvestigation On The Design of Double-Stage Scissor Lifts Based On Parametric Dimension TechniqueGogyPas encore d'évaluation
- Journal of Computer Science and Informat PDFDocument376 pagesJournal of Computer Science and Informat PDFZafr O'ConnellPas encore d'évaluation
- The Better Alignment Performance of Tsal PDFDocument182 pagesThe Better Alignment Performance of Tsal PDFZafr O'ConnellPas encore d'évaluation
- Questions For Part 3 - Topic: TransportationDocument39 pagesQuestions For Part 3 - Topic: TransportationZafr O'ConnellPas encore d'évaluation
- PET CT in Oncology Integration Into Clin PDFDocument10 pagesPET CT in Oncology Integration Into Clin PDFZafr O'Connell100% (1)
- Free and Open-Source Control Software For 3-D Motion and ProcessingDocument12 pagesFree and Open-Source Control Software For 3-D Motion and Processingvadivel.km1527Pas encore d'évaluation
- International Journal of Engineering Res PDFDocument14 pagesInternational Journal of Engineering Res PDFZafr O'ConnellPas encore d'évaluation
- Critical Lift Plan Each Piece of Partici PDFDocument1 pageCritical Lift Plan Each Piece of Partici PDFZafr O'ConnellPas encore d'évaluation
- Lifting Code of PracticeDocument34 pagesLifting Code of Practiceakubestlah67% (3)
- TWO 2 X 500 MW MONG DUONG 1 THERMAL POWE PDFDocument61 pagesTWO 2 X 500 MW MONG DUONG 1 THERMAL POWE PDFZafr O'ConnellPas encore d'évaluation
- Limiting LiabilityDocument9 pagesLimiting LiabilityZafr O'ConnellPas encore d'évaluation
- Low CostDocument9 pagesLow CostZafr O'ConnellPas encore d'évaluation
- Limiting LiabilityDocument9 pagesLimiting LiabilityZafr O'ConnellPas encore d'évaluation
- Access Pearce 2293018 ProofDocument8 pagesAccess Pearce 2293018 ProofAndrei MihalachePas encore d'évaluation
- PET CT A New Imaging Technology in NucleDocument19 pagesPET CT A New Imaging Technology in NucleZafr O'ConnellPas encore d'évaluation
- Lifting Plan 0002 Rev 0A Procedure / Work Instruction / Job Note Page 1 of 15Document14 pagesLifting Plan 0002 Rev 0A Procedure / Work Instruction / Job Note Page 1 of 15Mohd Wirawan PutraPas encore d'évaluation
- Lifting Code of PracticeDocument34 pagesLifting Code of Practiceakubestlah67% (3)
- Technical SpecificationsDocument8 pagesTechnical SpecificationsZafr O'ConnellPas encore d'évaluation
- General Specification for Painting and Surface PreparationDocument62 pagesGeneral Specification for Painting and Surface PreparationZafr O'ConnellPas encore d'évaluation
- Piping ScheduleDocument4 pagesPiping ScheduleZafr O'ConnellPas encore d'évaluation
- Surface Preparation & Painting Procedure: List of ContentDocument14 pagesSurface Preparation & Painting Procedure: List of ContentZafr O'ConnellPas encore d'évaluation
- PetroChina's Painting and Galvanizing SpecificationDocument19 pagesPetroChina's Painting and Galvanizing SpecificationZafr O'ConnellPas encore d'évaluation
- General Specification Painting and Galva PDFDocument19 pagesGeneral Specification Painting and Galva PDFZafr O'ConnellPas encore d'évaluation
- MangoCultivation PDFDocument10 pagesMangoCultivation PDFcacsniteshPas encore d'évaluation
- Airport ACEDocument51 pagesAirport ACEZafr O'ConnellPas encore d'évaluation
- Company Contact and IKTVA Survey DetailsDocument21 pagesCompany Contact and IKTVA Survey DetailsZafr O'ConnellPas encore d'évaluation
- BVM Catelogue New-2016 PDFDocument116 pagesBVM Catelogue New-2016 PDFOperation100% (1)
- Unrep nwp04 01Document440 pagesUnrep nwp04 01Juckgrid Parnsomsakun100% (1)
- Vdocuments - MX - Omni Flow Computer Manual PDFDocument57 pagesVdocuments - MX - Omni Flow Computer Manual PDFZafr O'ConnellPas encore d'évaluation
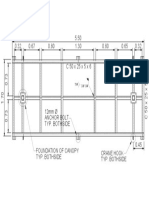
- Foundation plan for canopy with crane hook detailsDocument1 pageFoundation plan for canopy with crane hook detailsZafr O'ConnellPas encore d'évaluation
- Norsok M CR 501r1Document19 pagesNorsok M CR 501r1Peter AllisonPas encore d'évaluation
- Implement Oracle Configurator Functional FlowDocument28 pagesImplement Oracle Configurator Functional FlowAntoinePas encore d'évaluation
- Purposive Communication: Module 7: Communication For Various PurposesDocument11 pagesPurposive Communication: Module 7: Communication For Various PurposesKatherine Marie BerouPas encore d'évaluation
- Asr 1005 Aps 900 Ima 08Document21 pagesAsr 1005 Aps 900 Ima 08Anonymous vguPVDzZ7TPas encore d'évaluation
- (Non-QU) Linear Algebra by DR - Gabriel Nagy PDFDocument362 pages(Non-QU) Linear Algebra by DR - Gabriel Nagy PDFamrPas encore d'évaluation
- Creating GUIs with Java Swing ComponentsDocument51 pagesCreating GUIs with Java Swing ComponentsRisa ChanPas encore d'évaluation
- PathfinderDocument91 pagesPathfinderShashi SagarPas encore d'évaluation
- PS1Document1 pagePS1shivPas encore d'évaluation
- IADC/SPE-201088-MS Well Design and Engineering Process AutomationDocument12 pagesIADC/SPE-201088-MS Well Design and Engineering Process AutomationAleksey SolominPas encore d'évaluation
- Alpine Newbie - Alpine LinuxDocument4 pagesAlpine Newbie - Alpine LinuxBengt FrostPas encore d'évaluation
- 1.1 Introduction To Developer/2000 For The WebDocument20 pages1.1 Introduction To Developer/2000 For The WebsadicosadicoPas encore d'évaluation
- 5SYA 2093-00 - Thermal Design of IGBT ModulesDocument9 pages5SYA 2093-00 - Thermal Design of IGBT ModulesNuwantha FernandoPas encore d'évaluation
- P01-03 Plant Hierarchy V8.1 S0915 enDocument15 pagesP01-03 Plant Hierarchy V8.1 S0915 ennelle69Pas encore d'évaluation
- APlus Catalog - AC6530MUDocument1 pageAPlus Catalog - AC6530MUNgọc TrầnPas encore d'évaluation
- Lec 2.2 Differentiability and The Chain RuleDocument31 pagesLec 2.2 Differentiability and The Chain RuleChichu CommsPas encore d'évaluation
- BHBIA (ABPI) - AE, PC, SRS Guidance - August 2018 (Still Current)Document27 pagesBHBIA (ABPI) - AE, PC, SRS Guidance - August 2018 (Still Current)Zahid HussainPas encore d'évaluation
- WDT V100R005C00SPC100 Propaganda Slides For Indonesia 201501Document56 pagesWDT V100R005C00SPC100 Propaganda Slides For Indonesia 201501Ronie MarxistPas encore d'évaluation
- Unified Modeling Language (UML) : An OverviewDocument37 pagesUnified Modeling Language (UML) : An OverviewRaddad Al KingPas encore d'évaluation
- Cat TM82 8300manual PDFDocument2 pagesCat TM82 8300manual PDFbuddhika MadusankaPas encore d'évaluation
- PhotoQuad LicenseDocument3 pagesPhotoQuad LicensetaufiqsuhartoPas encore d'évaluation
- Best Software For Civil Engineering & Design in 2020 - G2Document19 pagesBest Software For Civil Engineering & Design in 2020 - G2sp thipathiPas encore d'évaluation
- hMailServer Configuration GuideDocument7 pageshMailServer Configuration GuideTvshows You MissedPas encore d'évaluation
- A Cloud Services Cheat Sheet For AWS, Azure, and Google CloudDocument16 pagesA Cloud Services Cheat Sheet For AWS, Azure, and Google CloudKartik ShuklaPas encore d'évaluation
- Infineon-Future Requirements For Automotive Hardware Security-Whitepaper-V01 00-ENDocument18 pagesInfineon-Future Requirements For Automotive Hardware Security-Whitepaper-V01 00-ENRavindra BPas encore d'évaluation
- Faculty Supervisor Evaluation Form For Project Semester: Rajat Kumar MechanicalDocument3 pagesFaculty Supervisor Evaluation Form For Project Semester: Rajat Kumar MechanicalSajal KhuranaPas encore d'évaluation
- Experiment No:01 Full Adder: Aim AlgorithmDocument25 pagesExperiment No:01 Full Adder: Aim AlgorithmKiran AthaniPas encore d'évaluation
- Correlation AnalysisDocument20 pagesCorrelation AnalysisVeerendra NathPas encore d'évaluation
- Selecting The Best Delay Analysis TechniqueDocument4 pagesSelecting The Best Delay Analysis TechniquesmshaidrPas encore d'évaluation
- Wish and If Only HandoutDocument2 pagesWish and If Only HandoutAntonio MoraesPas encore d'évaluation
- Panasonic KX td1232 - CompressDocument6 pagesPanasonic KX td1232 - CompressasfdsadfPas encore d'évaluation
- Indonesia Top 10 E-Commerce Sites by Monthly Traffic 2021 StatistaDocument1 pageIndonesia Top 10 E-Commerce Sites by Monthly Traffic 2021 StatistaRino Adi NugrohoPas encore d'évaluation