Vous aimerez peut-être aussi
- Diagrama cfd-rg880cpDocument14 pagesDiagrama cfd-rg880cpMarvin Leon Alegria100% (1)
- Panasonic Cq-Ts0920ab Toyota SM PDFDocument36 pagesPanasonic Cq-Ts0920ab Toyota SM PDFsantiago962Pas encore d'évaluation
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsD'EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsPas encore d'évaluation
- KDL 46HX750Document145 pagesKDL 46HX750Maya TesPas encore d'évaluation
- Phillips Service ManualDocument338 pagesPhillips Service Manualalopezcuervo100% (1)
- Inventec Chelsea 10M 6050a2250201 - Toshiba Satellite A505Document71 pagesInventec Chelsea 10M 6050a2250201 - Toshiba Satellite A505roto44Pas encore d'évaluation
- Inventec Chelsea 10M 6050a2250201 - Toshiba Satellite A505Document71 pagesInventec Chelsea 10M 6050a2250201 - Toshiba Satellite A505roto44Pas encore d'évaluation
- Donor's Tax Post QuizDocument12 pagesDonor's Tax Post QuizMichael Aquino0% (1)
- CRT3582 CX-3166Document27 pagesCRT3582 CX-3166Tai HuatPas encore d'évaluation
- Mecanismo Deh x3650Document36 pagesMecanismo Deh x3650Jeank RivadeneyraPas encore d'évaluation
- CRT2820 CX-3007Document22 pagesCRT2820 CX-3007Voja ElektronikPas encore d'évaluation
- Pioneer Cx-3240 Crt4050Document31 pagesPioneer Cx-3240 Crt4050boroda2410Pas encore d'évaluation
- Panasonic Sa-Ht930 Ref-Guide SMDocument23 pagesPanasonic Sa-Ht930 Ref-Guide SMRichard Kxorroloko100% (1)
- Toyota Audio Component Service Manual CQ-JT1010X CQ-JS6910X Radio With Cassette Tape Player and CDocument42 pagesToyota Audio Component Service Manual CQ-JT1010X CQ-JS6910X Radio With Cassette Tape Player and CAdan DariasPas encore d'évaluation
- Autoestereo Pioneer DEH-4090MP DEH-6010MPDocument39 pagesAutoestereo Pioneer DEH-4090MP DEH-6010MPGustavo De la OPas encore d'évaluation
- CD Mechanism Module (S11Ipod/Usb)Document40 pagesCD Mechanism Module (S11Ipod/Usb)Chami NdaPas encore d'évaluation
- Fpe 3206Dv Service ManualDocument51 pagesFpe 3206Dv Service ManualJames BlankenshipPas encore d'évaluation
- Panasonic Toyota Cq-js6880g SMDocument28 pagesPanasonic Toyota Cq-js6880g SMdumberPas encore d'évaluation
- Abs535t Service ManualDocument61 pagesAbs535t Service ManualvovchickPas encore d'évaluation
- Aeg-Dvd4535 Service ManualDocument25 pagesAeg-Dvd4535 Service ManualSerp19720% (1)
- Amoi Lc26t1e 32t1e 37t1e 42t1e (ET)Document120 pagesAmoi Lc26t1e 32t1e 37t1e 42t1e (ET)Dimitris ApostolouPas encore d'évaluation
- JVC KD r430 PDFDocument13 pagesJVC KD r430 PDFAleksPas encore d'évaluation
- Sharp cd-mpx870 PDFDocument112 pagesSharp cd-mpx870 PDFPedro MoraPas encore d'évaluation
- DPC 7100 DVD DaewooDocument26 pagesDPC 7100 DVD Daewooapi-3702225100% (1)
- Radio Samoch - cqts7421K Toyota Panasonic Matsushita Cq-ts7421k ToyotaDocument37 pagesRadio Samoch - cqts7421K Toyota Panasonic Matsushita Cq-ts7421k ToyotaJan DettlaffPas encore d'évaluation
- DVD Daewoo Dg-k301smDocument48 pagesDVD Daewoo Dg-k301smubaldobritoPas encore d'évaluation
- Samsung Plasma Training ManualDocument57 pagesSamsung Plasma Training ManualDamiao100% (1)
- Samsung Plasma Training ManualDocument57 pagesSamsung Plasma Training ManualevaristoPas encore d'évaluation
- TV Chassis Fc3g2 Training ManualDocument53 pagesTV Chassis Fc3g2 Training ManualUmar MajeedPas encore d'évaluation
- Telefunken+LED32S66T2S+Chassis+P75-2841V6 0Document45 pagesTelefunken+LED32S66T2S+Chassis+P75-2841V6 0Kal LianPas encore d'évaluation
- CQ-ES7880AZ: Am/Fm/Mpx Electronic Tuning RADIO With 6-Disc CD ChangerDocument28 pagesCQ-ES7880AZ: Am/Fm/Mpx Electronic Tuning RADIO With 6-Disc CD Changerdiablohuno100% (1)
- Toyota CQ MS0370K Service ID514Document28 pagesToyota CQ MS0370K Service ID514Giuseppe Di NezzaPas encore d'évaluation
- Radio de Auro Panasonic Cq-Rx100uDocument44 pagesRadio de Auro Panasonic Cq-Rx100umikePas encore d'évaluation
- Service Manual: CDX-L480XDocument20 pagesService Manual: CDX-L480Xkeremelekika7Pas encore d'évaluation
- Service Manual LCD Television: Model No. LCD-42XF7Document50 pagesService Manual LCD Television: Model No. LCD-42XF7Daniel AvecillaPas encore d'évaluation
- Panasonic CQ-MX0470LC SUZUKI Audio CarDocument33 pagesPanasonic CQ-MX0470LC SUZUKI Audio CarHayri ÖzPas encore d'évaluation
- Service Manual: FM/MW/LW Compact Disc PlayerDocument12 pagesService Manual: FM/MW/LW Compact Disc PlayerTiago MouraPas encore d'évaluation
- Mazda CQ-MM4570AK: Panasonic Automotive Systems CompanyDocument33 pagesMazda CQ-MM4570AK: Panasonic Automotive Systems CompanyȘtefănescu FlorinPas encore d'évaluation
- Panasonic CQ Ev1571gcDocument39 pagesPanasonic CQ Ev1571gcKenneth SuzonPas encore d'évaluation
- DVL 909Document47 pagesDVL 909Flaviano SaccàPas encore d'évaluation
- Mecanismo Radio Avh x2750btDocument55 pagesMecanismo Radio Avh x2750btmarcoaguPas encore d'évaluation
- DVP9000Document68 pagesDVP9000pasantitoPas encore d'évaluation
- Hyundai H-LCD2602 LCDDocument31 pagesHyundai H-LCD2602 LCDRicardo DolcePas encore d'évaluation
- TEAC AG790 Manual ServicoDocument21 pagesTEAC AG790 Manual ServicoThiago BressaniPas encore d'évaluation
- Service Manual: DP-IF5100Document34 pagesService Manual: DP-IF5100Kasi XswlPas encore d'évaluation
- Philips MonitorDocument15 pagesPhilips Monitordstoic1Pas encore d'évaluation
- Grundig gmm1100-stf55-1001 t2s08 Chassis (ET)Document23 pagesGrundig gmm1100-stf55-1001 t2s08 Chassis (ET)Simion VictorasPas encore d'évaluation
- Sony+CDX-GT21W GT210 GT260 EsquemaDocument44 pagesSony+CDX-GT21W GT210 GT260 Esquemamartawal620% (1)
- 310378525050Document88 pages310378525050Jan RiskenPas encore d'évaluation
- Correction of Service Manual: Date: Nov. 29,2004 No.: SCH04015 (1/8) Model No. S/M No. PG Model No. S/M No. PGDocument8 pagesCorrection of Service Manual: Date: Nov. 29,2004 No.: SCH04015 (1/8) Model No. S/M No. PG Model No. S/M No. PGmarcellojansen2856Pas encore d'évaluation
- Toshiba DVD Video PlayerDocument30 pagesToshiba DVD Video Playerhamada13Pas encore d'évaluation
- Datasheet Micro M65582AMF-105FPDocument46 pagesDatasheet Micro M65582AMF-105FPsel_mor100% (1)
- Panasonic TH l24c20dDocument39 pagesPanasonic TH l24c20dKingsleen33% (3)
- Msi MS-7592 Ver. 7.1Document33 pagesMsi MS-7592 Ver. 7.1Nava NarasimhaPas encore d'évaluation
- Technical Manual - Manual Técnico Panasonic Honda Fit Jazz 0502cqjh4480kDocument30 pagesTechnical Manual - Manual Técnico Panasonic Honda Fit Jazz 0502cqjh4480kEric Lúcio Silva RodriguesPas encore d'évaluation
- Diagrama cfd-g555cpDocument10 pagesDiagrama cfd-g555cpgannicus19Pas encore d'évaluation
- Mazda CQ-EM4571AK: Panasonic Automotive Systems CompanyDocument39 pagesMazda CQ-EM4571AK: Panasonic Automotive Systems Companyeduard vechaPas encore d'évaluation
- PD 63711Document64 pagesPD 63711Alceu Alves GonçalvesPas encore d'évaluation
- Benq q7c4 PDFDocument58 pagesBenq q7c4 PDFjose gomezPas encore d'évaluation
- DSAZIHA100078408Document20 pagesDSAZIHA100078408Rjati devamPas encore d'évaluation
- Instrumentation and Test Gear Circuits ManualD'EverandInstrumentation and Test Gear Circuits ManualÉvaluation : 5 sur 5 étoiles5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- User Manual: Register Your Product and Get Support atDocument41 pagesUser Manual: Register Your Product and Get Support atroto44Pas encore d'évaluation
- Sony APS-293 PDFDocument3 pagesSony APS-293 PDFnistoreduardcristianPas encore d'évaluation
- Philips htd3500-78-12 314178538322 Ver.1.2Document49 pagesPhilips htd3500-78-12 314178538322 Ver.1.2roto44Pas encore d'évaluation
- Panel PANDA LM315TU3A 0Document21 pagesPanel PANDA LM315TU3A 0roto44Pas encore d'évaluation
- G Board Schematic Diagram For 40" ModelDocument2 pagesG Board Schematic Diagram For 40" Modelroto44Pas encore d'évaluation
- Service Manual: ChassisDocument52 pagesService Manual: Chassisroto44Pas encore d'évaluation
- Standardization P12e Capacitors NichiconDocument1 pageStandardization P12e Capacitors Nichiconroto44Pas encore d'évaluation
- PHILIPS - 42PFL4506H Chassis TPM7.1E LA PDFDocument83 pagesPHILIPS - 42PFL4506H Chassis TPM7.1E LA PDFTestrootePas encore d'évaluation
- Sony - Kdl-32ex555 - CH - Az3f - Level - 3 2 PDFDocument45 pagesSony - Kdl-32ex555 - CH - Az3f - Level - 3 2 PDFjfranco1Pas encore d'évaluation
- Sony Power Supply Aps 243 G2beDocument2 pagesSony Power Supply Aps 243 G2beroto44Pas encore d'évaluation
- LGP4247H 12LPB 3P PDFDocument73 pagesLGP4247H 12LPB 3P PDFroto44Pas encore d'évaluation
- Bn44-00554b - Ic Ssc2001s Sector PFCDocument2 pagesBn44-00554b - Ic Ssc2001s Sector PFCAntonio Dalio67% (3)
- ZS-X4A: Mini 5V-30V DC PWM Speed Controller Electrical Motor Control or LED DimmerDocument1 pageZS-X4A: Mini 5V-30V DC PWM Speed Controller Electrical Motor Control or LED Dimmerroto44Pas encore d'évaluation
- LED Backlight Driver For LCD Monitors and Televisions: Description Features and BenefitsDocument17 pagesLED Backlight Driver For LCD Monitors and Televisions: Description Features and BenefitsGustavo Aguiar NovaisPas encore d'évaluation
- Power Board With PF6003ASDocument1 pagePower Board With PF6003ASAleluiz LuizPas encore d'évaluation
- NCP1251 DatasheetDocument24 pagesNCP1251 DatasheetJose BenavidesPas encore d'évaluation
- A Product Line of Diodes Incorporated: Lead-FreeDocument32 pagesA Product Line of Diodes Incorporated: Lead-Freeban4444Pas encore d'évaluation
- Data Sheet Chimei - V31501 - L01Document32 pagesData Sheet Chimei - V31501 - L01Vikri Aldi PutraPas encore d'évaluation
- LGP4247H 12LPB 3P PDFDocument73 pagesLGP4247H 12LPB 3P PDFroto44Pas encore d'évaluation
- Data Sheet Chimei - V31501 - L01Document32 pagesData Sheet Chimei - V31501 - L01Vikri Aldi PutraPas encore d'évaluation
- LED Backlight Driver For LCD Monitors and Televisions: Description Features and BenefitsDocument17 pagesLED Backlight Driver For LCD Monitors and Televisions: Description Features and BenefitsGustavo Aguiar NovaisPas encore d'évaluation
- PHILIPS - 42PFL4506H Chassis TPM7.1E LA PDFDocument83 pagesPHILIPS - 42PFL4506H Chassis TPM7.1E LA PDFTestrootePas encore d'évaluation
- Lnk6768v FamilyDocument24 pagesLnk6768v FamilyOrlando ChanampaPas encore d'évaluation
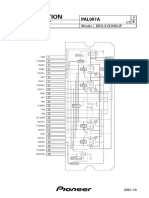
- Pioneer Pal007a Datasheet PDFDocument1 pagePioneer Pal007a Datasheet PDFroto44Pas encore d'évaluation
- Chassis TV TRC LB5ADocument1 pageChassis TV TRC LB5Aroto44Pas encore d'évaluation
- Bn44-00554b - Ic Ssc2001s Sector PFCDocument2 pagesBn44-00554b - Ic Ssc2001s Sector PFCAntonio Dalio67% (3)
- The Dell Direct Model: What It Means For Customers (Users) : - ProsDocument12 pagesThe Dell Direct Model: What It Means For Customers (Users) : - ProsAbhinandan MattelaPas encore d'évaluation
- Maneesh Misra CV - 1Document3 pagesManeesh Misra CV - 1Rohit KarhadePas encore d'évaluation
- Psar Techspec Autologicsoftwaretechspecfor Psarvehicles en PF v2.0Document183 pagesPsar Techspec Autologicsoftwaretechspecfor Psarvehicles en PF v2.0PhatPas encore d'évaluation
- DQI and Use Mentors JDDocument2 pagesDQI and Use Mentors JDLunaltPas encore d'évaluation
- FPO Policy-1Document96 pagesFPO Policy-1shashanksaranPas encore d'évaluation
- Business PlanDocument20 pagesBusiness PlanRona BautistaPas encore d'évaluation
- Difference Between Distinct and Group byDocument1 pageDifference Between Distinct and Group byPavelStrelkovPas encore d'évaluation
- Urban Jungle 8Document3 pagesUrban Jungle 8Angel Medez GonzalezPas encore d'évaluation
- Labor Case Digest MidtermsDocument219 pagesLabor Case Digest MidtermsMvapsPas encore d'évaluation
- MSW - 1 - 2016 Munisicpal Solid Waste Rules-2016 - Vol IDocument96 pagesMSW - 1 - 2016 Munisicpal Solid Waste Rules-2016 - Vol Inimm1962Pas encore d'évaluation
- Nigeria Country Profile - 0Document4 pagesNigeria Country Profile - 0Nden SohbutPas encore d'évaluation
- Bizagi Podcast TranscriptDocument6 pagesBizagi Podcast TranscriptHortencia RodriguezPas encore d'évaluation
- Valentine Carol Ann Duffy EssayDocument8 pagesValentine Carol Ann Duffy Essayafibybflnwowtr100% (1)
- DACReq 016Document19 pagesDACReq 016jillianixPas encore d'évaluation
- Solution For Databases Reference Architecture For Oracle Rac Database 12c With Gad Using HdidDocument48 pagesSolution For Databases Reference Architecture For Oracle Rac Database 12c With Gad Using HdidClaudio Osvaldo Vargas FarfanPas encore d'évaluation
- SLA707xM Series: 2-Phase Unipolar Stepper Motor DriverDocument20 pagesSLA707xM Series: 2-Phase Unipolar Stepper Motor DriverKatherine EsperillaPas encore d'évaluation
- Finaldis2011 1Document4 pagesFinaldis2011 1syaiful.idzwanPas encore d'évaluation
- Cover LetterDocument16 pagesCover LetterAjmal RafiquePas encore d'évaluation
- Insular Bank of Asia vs. InciongDocument11 pagesInsular Bank of Asia vs. InciongChristiane Marie BajadaPas encore d'évaluation
- HSE - Made Gde PanduDocument3 pagesHSE - Made Gde Pandurezki_WSPas encore d'évaluation
- WT Notes by Mohammed Ahmed PDFDocument11 pagesWT Notes by Mohammed Ahmed PDFElavarasan MathiPas encore d'évaluation
- Improving The Passenger Experience: Monitoring Airport Quality of ServiceDocument6 pagesImproving The Passenger Experience: Monitoring Airport Quality of ServiceParisa HadidianPas encore d'évaluation
- Product DetailsDocument215 pagesProduct DetailsEric MagnayePas encore d'évaluation
- QuickTransit SSLI Release Notes 1.1Document12 pagesQuickTransit SSLI Release Notes 1.1subhrajitm47Pas encore d'évaluation
- ESAT FormulaDocument11 pagesESAT FormulaSKYE LightsPas encore d'évaluation
- Project Execution and Control: Lunar International College July, 2021Document35 pagesProject Execution and Control: Lunar International College July, 2021getahun tesfayePas encore d'évaluation
- Digit Sep 09Document107 pagesDigit Sep 09dukerexPas encore d'évaluation
- Helicoil Plus en 0100Document56 pagesHelicoil Plus en 0100Khổng MạnhPas encore d'évaluation
- Sajjad Ali: API Mechanical Tank Inspector, QCI Welding (Aramco Approved)Document5 pagesSajjad Ali: API Mechanical Tank Inspector, QCI Welding (Aramco Approved)Owais MalikPas encore d'évaluation