Vous aimerez peut-être aussi
- Designer's Handbook Instrmtn/Contr CircuitsD'EverandDesigner's Handbook Instrmtn/Contr CircuitsÉvaluation : 5 sur 5 étoiles5/5 (1)
- The 8051 Microcontroller and Embedded Systems: Interrupts Programming in AssemblyDocument26 pagesThe 8051 Microcontroller and Embedded Systems: Interrupts Programming in AssemblyAnushkaSinhaPas encore d'évaluation
- How To Use The Capacitive Sensing Module (CSM)Document8 pagesHow To Use The Capacitive Sensing Module (CSM)Trinh DieuPas encore d'évaluation
- Interrupt 2017Document21 pagesInterrupt 2017ntldvlaiPas encore d'évaluation
- Chapter 11 - Writing Memory-ResDocument28 pagesChapter 11 - Writing Memory-ResGyula SolymosiPas encore d'évaluation
- L3 - InterruptDocument39 pagesL3 - Interruptandreasmagaka11Pas encore d'évaluation
- Introduction To PIC Interrupts and Their Handling in CDocument41 pagesIntroduction To PIC Interrupts and Their Handling in CveerakumarsPas encore d'évaluation
- InterruptsDocument16 pagesInterruptsRajaViriyalaPas encore d'évaluation
- Interrupt: Handler. ISR Tells The Processor or Controller What To Do When The InterruptDocument7 pagesInterrupt: Handler. ISR Tells The Processor or Controller What To Do When The InterruptSmita Patil-JagdalePas encore d'évaluation
- PCI100LS Man V2 - 6Document17 pagesPCI100LS Man V2 - 6TomPas encore d'évaluation
- The 8086 Interrupt Mechanism: The 8259A PICDocument14 pagesThe 8086 Interrupt Mechanism: The 8259A PICSatishPas encore d'évaluation
- EEE 412 Part-4-InterruptDocument8 pagesEEE 412 Part-4-InterruptvictorPas encore d'évaluation
- 4 ABB REF 615 Tech 756887 ENeDocument18 pages4 ABB REF 615 Tech 756887 ENeMahir DžafićPas encore d'évaluation
- Ninglu NMEA Simulator PDFDocument17 pagesNinglu NMEA Simulator PDFtariktunadPas encore d'évaluation
- External Interrupt in Atmega 16Document19 pagesExternal Interrupt in Atmega 16kelvinmanoj100% (1)
- Chapter 9: Interrupts, Timers and TasksDocument29 pagesChapter 9: Interrupts, Timers and TasksderrePas encore d'évaluation
- Unit 5 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDocument7 pagesUnit 5 - Microcontroller & Embedded System - WWW - Rgpvnotes.inDEFENCE MOTIVATIONPas encore d'évaluation
- Single Stage Digital Controller With Timed Cycle: Installing and Operating InstructionsDocument3 pagesSingle Stage Digital Controller With Timed Cycle: Installing and Operating InstructionsvishadkapadiaPas encore d'évaluation
- Preparation of Papers For IEEE T and J: (February 2017)Document10 pagesPreparation of Papers For IEEE T and J: (February 2017)Elkin CepedaPas encore d'évaluation
- Interrupts and Interrupts Service RoutineDocument4 pagesInterrupts and Interrupts Service RoutineHari PrakashPas encore d'évaluation
- Lab3 InterruptsDocument3 pagesLab3 InterruptsAnonymous AFFiZnPas encore d'évaluation
- Chapter 3 Interrupt Control SystemDocument52 pagesChapter 3 Interrupt Control SystemJevithaPas encore d'évaluation
- Microchip-Introduction To Capacitive SensingDocument10 pagesMicrochip-Introduction To Capacitive Sensinghoe3852Pas encore d'évaluation
- 8051 Interrupts and Interfacing Applications: Module - 5Document26 pages8051 Interrupts and Interfacing Applications: Module - 5Pate VishnuPas encore d'évaluation
- Interrupts: Department of EIE / Pondicherry Engineering CollegeDocument9 pagesInterrupts: Department of EIE / Pondicherry Engineering Collegeabsn sxadePas encore d'évaluation
- Capacity Controller EKC 331 PDFDocument8 pagesCapacity Controller EKC 331 PDFabdur rafayPas encore d'évaluation
- ToshibaS2E21ProductManual130719 1355935871Document12 pagesToshibaS2E21ProductManual130719 1355935871wher200202Pas encore d'évaluation
- BooksDocument14 pagesBookssravyaPas encore d'évaluation
- Measuring Temperature Using The Watchdog Timer (WDT) : TheoryDocument18 pagesMeasuring Temperature Using The Watchdog Timer (WDT) : TheoryadilPas encore d'évaluation
- Control Organisation of ArchitectureDocument29 pagesControl Organisation of Architectureanupam guptaPas encore d'évaluation
- Report Project StopwatchDocument21 pagesReport Project StopwatchMr Predator97% (36)
- MC Unit 4 Notes-2Document29 pagesMC Unit 4 Notes-2Nithya NagrajPas encore d'évaluation
- AS3 App Note 1.2.2 3 Wire Start Stop ControlDocument2 pagesAS3 App Note 1.2.2 3 Wire Start Stop ControlramoebpPas encore d'évaluation
- 1 System Design 2004 Analog Interfacing To Embedded Microprocessor SystemsDocument12 pages1 System Design 2004 Analog Interfacing To Embedded Microprocessor SystemsDorianPas encore d'évaluation
- Ik3 enDocument7 pagesIk3 enEsteban Calixto CrisoloPas encore d'évaluation
- TOF-WatchSXUsermanual Avalon MedicalDocument90 pagesTOF-WatchSXUsermanual Avalon MedicalestrellanaPas encore d'évaluation
- Using External Interrupts For MegaAVR DevicesDocument12 pagesUsing External Interrupts For MegaAVR DevicesJhon ZumaetaPas encore d'évaluation
- HP-PN89400-14A - 10 Steps To A Perfect Digital Demodulation MeasurementDocument16 pagesHP-PN89400-14A - 10 Steps To A Perfect Digital Demodulation Measurementsirjole7584100% (1)
- Lab 7Document8 pagesLab 7zagarzusemPas encore d'évaluation
- Interrupts 8085Document31 pagesInterrupts 8085varshithavarma103Pas encore d'évaluation
- Avr Project - Atmega8 Based RPM MeterDocument11 pagesAvr Project - Atmega8 Based RPM MetersatyamPas encore d'évaluation
- By Vijay Kumar. K Asst. Professor Dept. of ECEDocument67 pagesBy Vijay Kumar. K Asst. Professor Dept. of ECEsrianjaneya1234Pas encore d'évaluation
- Iontophoresis Implementation Using A Low-Cost MicrocontrollerDocument10 pagesIontophoresis Implementation Using A Low-Cost MicrocontrollerDejan MarkovicPas encore d'évaluation
- 16F84ADocument54 pages16F84AMohamed Ben FredjPas encore d'évaluation
- Unit 5Document52 pagesUnit 5mir xahidPas encore d'évaluation
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - C - 5Document27 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - C - 5Tomás BurónPas encore d'évaluation
- Interrupt 8086Document24 pagesInterrupt 8086Aarti KushwahaPas encore d'évaluation
- TIMERS & CountersDocument4 pagesTIMERS & CountersMathematics TutorPas encore d'évaluation
- FT-2500 Advanced Tachometer: Operation ManualDocument12 pagesFT-2500 Advanced Tachometer: Operation ManualMD Shahidul HoquePas encore d'évaluation
- 8051 Interrupts Programming in CDocument46 pages8051 Interrupts Programming in CDr Narayana Swamy RamaiahPas encore d'évaluation
- By Vijay Kumar. K Dept. of ECE JntuacekDocument63 pagesBy Vijay Kumar. K Dept. of ECE JntuacekAnil DharavathPas encore d'évaluation
- Adv. MicrocontrollerDocument12 pagesAdv. Microcontrollermd mamnunPas encore d'évaluation
- Microprocessor Interfacing & Programming: Laboratory ManualDocument13 pagesMicroprocessor Interfacing & Programming: Laboratory ManualMuneeb Ahmad NasirPas encore d'évaluation
- Interrupts and TimersDocument21 pagesInterrupts and TimersjaypalibmPas encore d'évaluation
- Alaris GW - OxpsDocument77 pagesAlaris GW - OxpsEdgar DauzonPas encore d'évaluation
- Intreruperi C EmbeddedDocument6 pagesIntreruperi C Embeddedalexandra_popuPas encore d'évaluation
- 99 000 RPM Contact-Less Digital Tachometer: Featuring LCD Display and Automatic DATA Hold FunctionDocument9 pages99 000 RPM Contact-Less Digital Tachometer: Featuring LCD Display and Automatic DATA Hold Functionapi-19786583Pas encore d'évaluation
- Ch13 InterruptDocument41 pagesCh13 InterruptMir4 BritoPas encore d'évaluation
- Laboratory3 Marking Scheme PDFDocument13 pagesLaboratory3 Marking Scheme PDFAmna EhtshamPas encore d'évaluation
- Laboratory3 Marking SchemeDocument13 pagesLaboratory3 Marking SchemeAmna EhtshamPas encore d'évaluation
- 1 Egg & Egg Cookery LectureDocument15 pages1 Egg & Egg Cookery LectureErin DelavinPas encore d'évaluation
- X++ Control StatementsDocument42 pagesX++ Control StatementsHarish MehraPas encore d'évaluation
- Ubd Planning Template With QuestionsDocument3 pagesUbd Planning Template With Questionsapi-217297849Pas encore d'évaluation
- 4 Activity Guide and Evaluation Rubric - Unit 2 - Task 4 - Lets Talk and Share - Speaking Task - En.esDocument8 pages4 Activity Guide and Evaluation Rubric - Unit 2 - Task 4 - Lets Talk and Share - Speaking Task - En.esFabiana Cataño gomezPas encore d'évaluation
- Diagbootx: // Public Release 1Document4 pagesDiagbootx: // Public Release 1Tedy AdhinegoroPas encore d'évaluation
- Thermodynamics NotesDocument2 pagesThermodynamics Notesjpu_48Pas encore d'évaluation
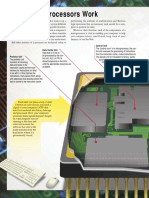
- How Microprocessors Work PDFDocument2 pagesHow Microprocessors Work PDFdanielconstantin4Pas encore d'évaluation
- Dual Axis Solar Activity Tracker For Solar Panels: Department of Engineering, Sciences and Humanities (DESH)Document5 pagesDual Axis Solar Activity Tracker For Solar Panels: Department of Engineering, Sciences and Humanities (DESH)sujay patilPas encore d'évaluation
- Unit 10 Lesson 3 Activity Guide - Unreasonable TimeDocument2 pagesUnit 10 Lesson 3 Activity Guide - Unreasonable Timetrivediom427Pas encore d'évaluation
- BIBLIOMETRICDocument30 pagesBIBLIOMETRICkalaranishanmuganathPas encore d'évaluation
- Clipping Clamping CircuitsDocument7 pagesClipping Clamping CircuitsPavan SaiPas encore d'évaluation
- FCE 331 Strength of Materials IIA CAT, January 2022Document2 pagesFCE 331 Strength of Materials IIA CAT, January 2022devPas encore d'évaluation
- PM-DM/DMR / Pm-2Dm/2Dmr: Digital MultimetersDocument2 pagesPM-DM/DMR / Pm-2Dm/2Dmr: Digital MultimeterstonielhagePas encore d'évaluation
- Forces Revision Questions 1. Resistive Force.: Island School 1Document13 pagesForces Revision Questions 1. Resistive Force.: Island School 1Deepal PrasankaPas encore d'évaluation
- GGGB6023 Tugasan Tutorial 3 - P69060 Mior SyazrilDocument5 pagesGGGB6023 Tugasan Tutorial 3 - P69060 Mior SyazrilAmizan AbdullahPas encore d'évaluation
- Computer Networks: Introduction (Chapter 1)Document92 pagesComputer Networks: Introduction (Chapter 1)Speed PianoPas encore d'évaluation
- Korean Lesson 1Document12 pagesKorean Lesson 1Ivett97Pas encore d'évaluation
- The Whys and Wherefores of Microphone Array Crosstalk in Multichannel Microphone Array DesignDocument6 pagesThe Whys and Wherefores of Microphone Array Crosstalk in Multichannel Microphone Array DesignmewarulesPas encore d'évaluation
- Module 3Document10 pagesModule 3Michael godsonPas encore d'évaluation
- SolutionsDocument8 pagesSolutionsJavid BalakishiyevPas encore d'évaluation
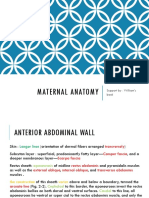
- Chapter 2 Maternal Anatomy WilliamsDocument60 pagesChapter 2 Maternal Anatomy WilliamsDiskaAstariniPas encore d'évaluation
- Unit-III - EEFA - CostsDocument70 pagesUnit-III - EEFA - CostsRamalingam ChandrasekharanPas encore d'évaluation
- Oracle Database 11g Transparent Data EncryptionDocument40 pagesOracle Database 11g Transparent Data EncryptionYelena BytenskayaPas encore d'évaluation
- Deductive ReasoningDocument2 pagesDeductive ReasoningMariel C. BombitaPas encore d'évaluation
- Postmodernity in PiDocument2 pagesPostmodernity in Pixhardy27Pas encore d'évaluation
- Fatigue Life Prediction - An Overview - ScienceDirect TopicsDocument14 pagesFatigue Life Prediction - An Overview - ScienceDirect TopicsMohamed AlaaElDinPas encore d'évaluation
- Netxknx Opc 3 - 5 - 4 EngDocument93 pagesNetxknx Opc 3 - 5 - 4 Engtai_sao_khong_1307Pas encore d'évaluation
- 351 DatasheetDocument14 pages351 DatasheetRafael NavarroPas encore d'évaluation
- PDF To Image Converter v2 HOW TO USEDocument3 pagesPDF To Image Converter v2 HOW TO USEfairfaxcyclesPas encore d'évaluation
- 07 Bubble BreakDocument25 pages07 Bubble BreakWeb LogueandoPas encore d'évaluation