Vous aimerez peut-être aussi
- Unit IVCAO NotesDocument67 pagesUnit IVCAO NotesAshish PalandurkarPas encore d'évaluation
- 15CS34 Co Module2 Notes PDFDocument63 pages15CS34 Co Module2 Notes PDFdeepa G RPas encore d'évaluation
- Accessing Io Devices in System MemoryDocument4 pagesAccessing Io Devices in System Memoryrohit sharmaPas encore d'évaluation
- Chapter - 03: Accessing I/O DevicesDocument42 pagesChapter - 03: Accessing I/O DevicesJoseph JohnPas encore d'évaluation
- Unit-V: Introduction To I/ODocument17 pagesUnit-V: Introduction To I/Osurya suryaPas encore d'évaluation
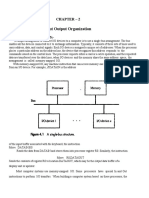
- Input Output Organization: Chapter - 2Document22 pagesInput Output Organization: Chapter - 2Rahul JainPas encore d'évaluation
- COMPUTER ORGANIZATION AND ARCHITECTURE Module 3 NOTESDocument19 pagesCOMPUTER ORGANIZATION AND ARCHITECTURE Module 3 NOTESbalajibs203285Pas encore d'évaluation
- Module 2Document37 pagesModule 2Amruta KhangaonkarPas encore d'évaluation
- Co Module V 2020Document34 pagesCo Module V 2020jinto0007Pas encore d'évaluation
- MODULE 4 Input Output OrganizationDocument96 pagesMODULE 4 Input Output OrganizationMadhura N KPas encore d'évaluation
- B Tech CSE - IV Sem - TCS 404 Computer Organisation - Unit-3 Part IDocument123 pagesB Tech CSE - IV Sem - TCS 404 Computer Organisation - Unit-3 Part Iriyarajsaxena55555Pas encore d'évaluation
- 15cs34 Module 2Document123 pages15cs34 Module 2Anonymous aPFl2oPas encore d'évaluation
- Chapter3-Io OrganizationDocument77 pagesChapter3-Io OrganizationPUNITH KUMAR VM100% (1)
- Module 2 IO OrganizationDocument104 pagesModule 2 IO OrganizationrrPas encore d'évaluation
- Computer Architecture Unit NotesDocument30 pagesComputer Architecture Unit NotesBalaji Shanmugam100% (1)
- Computer Architecture: 1. Draw A Diagram Single Bus Organization of The Data Path Inside A ProcessorDocument8 pagesComputer Architecture: 1. Draw A Diagram Single Bus Organization of The Data Path Inside A Processormd sayemPas encore d'évaluation
- COA Module 3 BEC306CDocument14 pagesCOA Module 3 BEC306Csachinksr007Pas encore d'évaluation
- Unit IV IO NotesDocument15 pagesUnit IV IO NotesVarun VanaparthyPas encore d'évaluation
- MODULE 2: Input / Output Organization: Courtesy: Text Book: Carl Hamacher 5 EditionDocument95 pagesMODULE 2: Input / Output Organization: Courtesy: Text Book: Carl Hamacher 5 Editionayush mittalPas encore d'évaluation
- Input/Output Organization in Computer Organisation and ArchitectureDocument99 pagesInput/Output Organization in Computer Organisation and ArchitectureAnand YadavPas encore d'évaluation
- Computer Organisation-Unit - IIIDocument17 pagesComputer Organisation-Unit - IIIJust AndroPas encore d'évaluation
- Accessing I/O DevicesDocument33 pagesAccessing I/O DevicesKishore SKPas encore d'évaluation
- Chapter7-Io OrganizationDocument101 pagesChapter7-Io Organization684RICHA SINGHPas encore d'évaluation
- CO Module 2 PPTDocument83 pagesCO Module 2 PPTIshu ishuPas encore d'évaluation
- CO Unit 5 - Input and Output OrganizationDocument20 pagesCO Unit 5 - Input and Output OrganizationAkhilPas encore d'évaluation
- DDCO Mod - 2Document36 pagesDDCO Mod - 2pavan gowda tsPas encore d'évaluation
- Module 3: Input / Output Organization: CPU, Memory and I/O Devices CPU, Memory and I/O DevicesDocument21 pagesModule 3: Input / Output Organization: CPU, Memory and I/O Devices CPU, Memory and I/O DevicesK RamamaniPas encore d'évaluation
- TIE CO Module 2Document10 pagesTIE CO Module 2RamanPas encore d'évaluation
- COA Module3Document28 pagesCOA Module3puse1223Pas encore d'évaluation
- CS2253 U5 NotesDocument34 pagesCS2253 U5 Notesbhuvi2312Pas encore d'évaluation
- IO OpeartionsDocument19 pagesIO OpeartionsMuthukumar ManickamPas encore d'évaluation
- Unit2 Io Organization 97 2003Document97 pagesUnit2 Io Organization 97 2003Apoorva JagtapPas encore d'évaluation
- COA Mod3@AzDOCUMENTS - inDocument9 pagesCOA Mod3@AzDOCUMENTS - inINDIAN LEGENDSPas encore d'évaluation
- In Put Out Put OrganizationDocument45 pagesIn Put Out Put OrganizationdevibalaPas encore d'évaluation
- Unit - 4 COADocument18 pagesUnit - 4 COAVibhash Kumar GabelPas encore d'évaluation
- Computer Organization and Architecture (18EC35) - Input/Output Organization (Module 3)Document82 pagesComputer Organization and Architecture (18EC35) - Input/Output Organization (Module 3)Shrishail Bhat50% (2)
- Chapter7 Io OrganizationDocument96 pagesChapter7 Io OrganizationnarendranvelPas encore d'évaluation
- Module 1 Part 2: Input/Output OrganizationDocument50 pagesModule 1 Part 2: Input/Output Organizations8102003Pas encore d'évaluation
- KTU - CST202: I/O Organization - T M SDocument34 pagesKTU - CST202: I/O Organization - T M SJoel K SanthoshPas encore d'évaluation
- Module3 Io OrganizationDocument57 pagesModule3 Io OrganizationDr Dilip RPas encore d'évaluation
- Input Output Organisation: BY: Vaishakh B N USN:1RV09CS1114Document62 pagesInput Output Organisation: BY: Vaishakh B N USN:1RV09CS1114Vaishakh BaragurPas encore d'évaluation
- Module 4Document15 pagesModule 4prajyotroyalPas encore d'évaluation
- Unit-Iv Microcontroller (EC405) AVR Counters, Interrupt, Serial Input/output DataDocument32 pagesUnit-Iv Microcontroller (EC405) AVR Counters, Interrupt, Serial Input/output DataDr-Suraj Kumar SawPas encore d'évaluation
- Computer Organization-Chapter 9Document9 pagesComputer Organization-Chapter 9Bipin MasalPas encore d'évaluation
- Chapter 4Document55 pagesChapter 4Nurul Badriah Anwar AliPas encore d'évaluation
- Input/ Output Organization: Accessing I/O DevicesDocument12 pagesInput/ Output Organization: Accessing I/O DevicesGahan A V Gowda100% (1)
- Computer Science & Engineering II B.Tech. - II Semester: Department ofDocument32 pagesComputer Science & Engineering II B.Tech. - II Semester: Department ofTalluru Aditya Prakash Talluru Venkata Siva RamakrishnaPas encore d'évaluation
- Input-Output Modules: Detection Mechanism. Functions of I/O ModuleDocument8 pagesInput-Output Modules: Detection Mechanism. Functions of I/O ModuleSubash GautamPas encore d'évaluation
- Ddco m4 NOTESDocument16 pagesDdco m4 NOTESShankar MPas encore d'évaluation
- Unit-5 COADocument54 pagesUnit-5 COASAURAV CHAUDHARYPas encore d'évaluation
- Unit - 5Document69 pagesUnit - 5Aayush BhatPas encore d'évaluation
- Unit - V 5.0) Introduction: Digital Logic and Computer OrganizationDocument11 pagesUnit - V 5.0) Introduction: Digital Logic and Computer OrganizationJit AggPas encore d'évaluation
- Chp6 Interrupt - StackDocument12 pagesChp6 Interrupt - StackNur AfiqahPas encore d'évaluation
- Input Output Organization Question AnswerDocument33 pagesInput Output Organization Question AnswerSukanta BosePas encore d'évaluation
- Embedded 2Document38 pagesEmbedded 2SHUBHANKAR SONIPas encore d'évaluation
- Unit2 COADocument8 pagesUnit2 COASk ShettyPas encore d'évaluation
- Chp6 Interrupt - StacknewDocument11 pagesChp6 Interrupt - Stacknewheyfiez12Pas encore d'évaluation
- IO OrganizationDocument99 pagesIO OrganizationBaji vali SkPas encore d'évaluation
- Dynamic ProgrammingDocument23 pagesDynamic ProgrammingHydroPas encore d'évaluation
- Visvesvaraya Technological University, BelagaviDocument46 pagesVisvesvaraya Technological University, BelagaviEragon ShadeSlayerPas encore d'évaluation
- Cse Iii Engineering Mathematics Iii 10mat31 Notes PDFDocument138 pagesCse Iii Engineering Mathematics Iii 10mat31 Notes PDFPPatilPas encore d'évaluation
- History of Embedded Systems.Document2 pagesHistory of Embedded Systems.Eragon ShadeSlayerPas encore d'évaluation
- ARM Instruction SetDocument75 pagesARM Instruction SetEragon ShadeSlayerPas encore d'évaluation
- Daa Lab GcemDocument39 pagesDaa Lab GcemEragon ShadeSlayerPas encore d'évaluation
- On The Origin, Nature, and Consequences of Artificial IntelligenceDocument9 pagesOn The Origin, Nature, and Consequences of Artificial IntelligenceEragon ShadeSlayerPas encore d'évaluation
- 18cs38 WaveformsDocument2 pages18cs38 WaveformsEragon ShadeSlayerPas encore d'évaluation
- 18csl37-Ade Lab ManualDocument41 pages18csl37-Ade Lab ManualEragon ShadeSlayerPas encore d'évaluation
- Basic Electronics Engg. 15eln15 NotesDocument124 pagesBasic Electronics Engg. 15eln15 NotesSwamy SlrPas encore d'évaluation
- Vtu SyllabusDocument140 pagesVtu Syllabuss.kotireddy44586Pas encore d'évaluation
- Concrete PDFDocument35 pagesConcrete PDFRitesh PaliwalPas encore d'évaluation
- Virtual MemoryDocument2 pagesVirtual MemoryJohn Cliff BautistaPas encore d'évaluation
- n0512UK-DNP3 Communication PDFDocument35 pagesn0512UK-DNP3 Communication PDFThức VõPas encore d'évaluation
- Float Tank PlansDocument16 pagesFloat Tank PlansColt553394% (17)
- Instalando Depnedências Linux de Acordo Com A Sua Distribuição Oracle Linux 4, Update 6 or NewerDocument8 pagesInstalando Depnedências Linux de Acordo Com A Sua Distribuição Oracle Linux 4, Update 6 or NewerPaulo DondPas encore d'évaluation
- Architecture (AR) III YearDocument17 pagesArchitecture (AR) III YearFiroj AnsariPas encore d'évaluation
- CTS Komponent® - DATASHEETDocument2 pagesCTS Komponent® - DATASHEETJoseph AsfourPas encore d'évaluation
- New Fast Volume 1Document284 pagesNew Fast Volume 1Bruno César SilvaPas encore d'évaluation
- Encounters 3Document4 pagesEncounters 3lgwqmsiaPas encore d'évaluation
- Life Time Prediction of GRP Piping SystemsDocument15 pagesLife Time Prediction of GRP Piping SystemsRamon FrenchPas encore d'évaluation
- Raj Rewal Architecture Case StudyDocument4 pagesRaj Rewal Architecture Case StudyAnkush Bharti0% (1)
- Planitop HDM MaxiDocument4 pagesPlanitop HDM MaxidraganugPas encore d'évaluation
- MyNotes Concrete ColDocument29 pagesMyNotes Concrete ColKarl Si AkoPas encore d'évaluation
- DSLAM ConfigurationDocument82 pagesDSLAM ConfigurationEhsan GhasisinPas encore d'évaluation
- K U M SAFETY BOOK - INDEX With HYPERLINKDocument4 pagesK U M SAFETY BOOK - INDEX With HYPERLINKsachivkumar100% (4)
- Lebanese University: Zeinab NounDocument1 pageLebanese University: Zeinab NounZeina NounPas encore d'évaluation
- Marina Bay SandsDocument59 pagesMarina Bay SandsPratik BishtPas encore d'évaluation
- Sap SCM WPDocument57 pagesSap SCM WPvirgilioavila3698Pas encore d'évaluation
- Modbus Protocol For P39-1Document21 pagesModbus Protocol For P39-1Jairo Leon Cifuentes DelgadoPas encore d'évaluation
- Unit-2 Operating SystemDocument74 pagesUnit-2 Operating SystemSaroj VarshneyPas encore d'évaluation
- A-320 - Fire Proofing of Steel StructureDocument11 pagesA-320 - Fire Proofing of Steel StructurePoorvi Bhave75% (4)
- Swarrnim Startup and Innovation University Department of Civil Engineering Semester: 3 Sub: Concrete TechnologyDocument6 pagesSwarrnim Startup and Innovation University Department of Civil Engineering Semester: 3 Sub: Concrete TechnologyAkshay Kumar SutariyaPas encore d'évaluation
- BANGLOW2Document12 pagesBANGLOW2rokiahhassan100% (1)
- BOSS Air and Dirt Separation BrochureDocument8 pagesBOSS Air and Dirt Separation BrochureWayde WillinsPas encore d'évaluation
- Wa0029.Document1 pageWa0029.LINGGA JAYAPas encore d'évaluation
- Bos 5.5.1 Installation Guide JbossDocument20 pagesBos 5.5.1 Installation Guide JbossklepssPas encore d'évaluation
- Sika Multiseal: Self-Adhesive Bituminous Sealing TapeDocument2 pagesSika Multiseal: Self-Adhesive Bituminous Sealing TapeTitis W. PratiwiPas encore d'évaluation
- Anchored Bulkhead - Determintion of Anchored Bulkhead: Free Earth Support MethodDocument4 pagesAnchored Bulkhead - Determintion of Anchored Bulkhead: Free Earth Support MethodpkPas encore d'évaluation
- Case StudyDocument16 pagesCase Studysagrikakhandka100% (1)
- 1KHW001489-En Instruction Manual ETL600R3 (June 2012, Annex Updated March 2014)Document486 pages1KHW001489-En Instruction Manual ETL600R3 (June 2012, Annex Updated March 2014)Carlos Sulca NeiraPas encore d'évaluation
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]D'EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Évaluation : 5 sur 5 étoiles5/5 (2)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsD'EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsÉvaluation : 5 sur 5 étoiles5/5 (2)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyD'EverandChip War: The Quest to Dominate the World's Most Critical TechnologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (227)
- Chip War: The Fight for the World's Most Critical TechnologyD'EverandChip War: The Fight for the World's Most Critical TechnologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (82)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102D'EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Évaluation : 5 sur 5 étoiles5/5 (2)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XD'EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XÉvaluation : 3 sur 5 étoiles3/5 (2)
- Raspberry Pi for Python Programmers Cookbook - Second EditionD'EverandRaspberry Pi for Python Programmers Cookbook - Second EditionPas encore d'évaluation
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002D'EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Évaluation : 5 sur 5 étoiles5/5 (1)
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)D'EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Évaluation : 5 sur 5 étoiles5/5 (1)
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsD'EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsPas encore d'évaluation
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)D'EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Évaluation : 5 sur 5 étoiles5/5 (2)
- Mastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFD'EverandMastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFPas encore d'évaluation
- Amazon Web Services (AWS) Interview Questions and AnswersD'EverandAmazon Web Services (AWS) Interview Questions and AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Arduino Sketches: Tools and Techniques for Programming WizardryD'EverandArduino Sketches: Tools and Techniques for Programming WizardryÉvaluation : 4 sur 5 étoiles4/5 (1)
- How to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideD'EverandHow to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideÉvaluation : 1 sur 5 étoiles1/5 (1)
- Amazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesD'EverandAmazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesPas encore d'évaluation
- CompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102D'EverandCompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Pas encore d'évaluation
- Essential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XD'EverandEssential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XÉvaluation : 5 sur 5 étoiles5/5 (1)
- Raspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesD'EverandRaspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesPas encore d'évaluation