Vous aimerez peut-être aussi
- PAGPRO - Formato de ArchivosDocument20 pagesPAGPRO - Formato de Archivoskerly1111Pas encore d'évaluation
- RCM - Caso Estudio - Espec.asmeDocument50 pagesRCM - Caso Estudio - Espec.asmeEdgar EstrellaPas encore d'évaluation
- Actividad - Integradora - 3 MatematicasDocument2 pagesActividad - Integradora - 3 Matematicasjulio100% (3)
- Sesión 8-1Document25 pagesSesión 8-1Lennon CQPas encore d'évaluation
- Expresiones AlgebraicasDocument13 pagesExpresiones AlgebraicasEladio Arotuma CondenaPas encore d'évaluation
- Temperatura Calibracion PDFDocument57 pagesTemperatura Calibracion PDFJavier D. SolisPas encore d'évaluation
- Semana 10-Formato Análogo-Sombras Arrojadas. - Arq. Ruth FrancoDocument62 pagesSemana 10-Formato Análogo-Sombras Arrojadas. - Arq. Ruth FrancoMario CalvisiPas encore d'évaluation
- Cimentacion de Torres de Alta TensionDocument39 pagesCimentacion de Torres de Alta TensionCésar Autentics OL71% (7)
- Principio de BernoulliDocument12 pagesPrincipio de BernoulliJuan David Rondinel BulejePas encore d'évaluation
- Copia de Calculo FuncionesDocument1 pageCopia de Calculo FuncionesGermanSepulvedaBolivarPas encore d'évaluation
- Clase 9 y 10 Muestreo Cuantitativo y CualitativoDocument26 pagesClase 9 y 10 Muestreo Cuantitativo y Cualitativofran121604Pas encore d'évaluation
- 011 Aquiles Gay Sólo Lectura Del ObjetoDocument7 pages011 Aquiles Gay Sólo Lectura Del ObjetoThaliaCallePolanco100% (1)
- Intensivo Uni Cesar Vallejo Semana 14 RM 2020-2Document5 pagesIntensivo Uni Cesar Vallejo Semana 14 RM 2020-2Rodrigo Dîaz RojasPas encore d'évaluation
- Material Arreglos en PythonDocument6 pagesMaterial Arreglos en PythonAlex M.Pas encore d'évaluation
- Función Lineal - Actividad 2 - Parte 2Document4 pagesFunción Lineal - Actividad 2 - Parte 2Samuel KWPas encore d'évaluation
- Ejercicios y Problemas Con Múltiplos y DivisoresDocument3 pagesEjercicios y Problemas Con Múltiplos y DivisoresAladino Barrantes pérezPas encore d'évaluation
- I03 - Diseno Del Codigo de Barras y Archivo de Transmision - Adminstradoras de ConsorcioDocument4 pagesI03 - Diseno Del Codigo de Barras y Archivo de Transmision - Adminstradoras de ConsorcioHéctor ReyesPas encore d'évaluation
- Introducción-a-los-Conjuntos-para-Cuarto-Grado-de-Primaria (Reparado)Document14 pagesIntroducción-a-los-Conjuntos-para-Cuarto-Grado-de-Primaria (Reparado)Mirtha RoxanaPas encore d'évaluation
- Reglamento para La Seguridad Estructural de Las ConstruccionesDocument19 pagesReglamento para La Seguridad Estructural de Las ConstruccionesHerbert RacPas encore d'évaluation
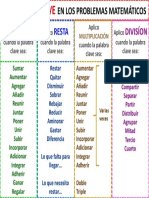
- Palabras Clave para La Resolución de Problemas MatemáticosDocument1 pagePalabras Clave para La Resolución de Problemas MatemáticosEdi Bermejo Robles85% (20)
- Patinaje de CarrerasDocument34 pagesPatinaje de CarrerasPaula ParraPas encore d'évaluation
- Planeación Diaria Ciencias 2 Bloque 3Document7 pagesPlaneación Diaria Ciencias 2 Bloque 3vh_pizarroPas encore d'évaluation
- Examen Parcial Algebra SuperiorDocument2 pagesExamen Parcial Algebra SuperiorFelipe Ramirez Sandoval100% (7)
- Matematicas Recurso Bloque008 1Document1 pageMatematicas Recurso Bloque008 1Naomi BenitezPas encore d'évaluation
- Tipos de Argumentos.19Document16 pagesTipos de Argumentos.19Nathali TorresPas encore d'évaluation
- Los Cuatro CirculosDocument17 pagesLos Cuatro CirculosDennis CalvachePas encore d'évaluation
- Preguntas para 5to de SecundariaDocument7 pagesPreguntas para 5to de SecundariaWilder EscribaPas encore d'évaluation
- Sistema de Medición y ÁngulosDocument5 pagesSistema de Medición y ÁngulosEdith de la RosaPas encore d'évaluation
- Adm Finanzas 2-1Document18 pagesAdm Finanzas 2-1mileystefitahPas encore d'évaluation