Vous aimerez peut-être aussi
- Design and Fabrication of Vertical Axis Wind TurbineDocument20 pagesDesign and Fabrication of Vertical Axis Wind TurbinePryce YurongPas encore d'évaluation
- EE PowerElectronicsAndPowerSystemsDocument88 pagesEE PowerElectronicsAndPowerSystemsBenitta MaryPas encore d'évaluation
- CTK Engineering College Power System Operation and Control NotesDocument125 pagesCTK Engineering College Power System Operation and Control NotesG.L. Jai Purushotham RajPas encore d'évaluation
- Design of A Generator Excitation System PDFDocument79 pagesDesign of A Generator Excitation System PDFvictor hidroPas encore d'évaluation
- Automatic Generation ControlDocument12 pagesAutomatic Generation ControlTitipong PulbunrojPas encore d'évaluation
- HVDC Notes PDFDocument22 pagesHVDC Notes PDFupender raoPas encore d'évaluation
- Energy-Efficient Electric Motors and Their Applications by Howard E. Jordan (Auth.)Document194 pagesEnergy-Efficient Electric Motors and Their Applications by Howard E. Jordan (Auth.)mylaptop VJethosePas encore d'évaluation
- J Renene 2019 11 157Document70 pagesJ Renene 2019 11 157hamza malikPas encore d'évaluation
- Design of Squirrel Cage RotorDocument34 pagesDesign of Squirrel Cage RotorkamleshPas encore d'évaluation
- Chapter OneDocument28 pagesChapter OneObafemi Samuel0% (1)
- No - Ntnu Inspera 79786156 64576396Document173 pagesNo - Ntnu Inspera 79786156 64576396Thành ViếtPas encore d'évaluation
- 06-DC Compound MotorDocument44 pages06-DC Compound MotorN. iManPas encore d'évaluation
- BLDC and PMS Motor ComparisonDocument26 pagesBLDC and PMS Motor ComparisonAnimesh MukherjeePas encore d'évaluation
- Understanding Automatic Generation ControlDocument17 pagesUnderstanding Automatic Generation ControlJeff WeiPas encore d'évaluation
- VECXOR CONTROL TECHNIQUES FOR INDUCTION MOTORSDocument6 pagesVECXOR CONTROL TECHNIQUES FOR INDUCTION MOTORSThinseepPas encore d'évaluation
- Lab MachineDocument9 pagesLab MachineAnonymous ryvoPIDPas encore d'évaluation
- Wound-Field Synchronous Machine DrivesDocument62 pagesWound-Field Synchronous Machine DrivesKorlpate BhaskarPas encore d'évaluation
- PMSM Control Strategy ComparisonDocument4 pagesPMSM Control Strategy Comparisonpersian67Pas encore d'évaluation
- Nonlinear Predictive Control of A Benchmark CSTRDocument6 pagesNonlinear Predictive Control of A Benchmark CSTRRohan LakhaniPas encore d'évaluation
- Chapter 5: Speed-Torque Characteristics of Electric MotorsDocument46 pagesChapter 5: Speed-Torque Characteristics of Electric MotorsFrozenTuxPas encore d'évaluation
- Unit Iii Induction Motor Drives: Dept. of EEEDocument17 pagesUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarPas encore d'évaluation
- State Space Modeling of Buck Boost ConverterDocument4 pagesState Space Modeling of Buck Boost ConverterZonun sangaPas encore d'évaluation
- Unit I Notes July2016Document153 pagesUnit I Notes July2016Ranjith KumarPas encore d'évaluation
- Unit-5 Speed Control of Three Phase Induction MotorDocument16 pagesUnit-5 Speed Control of Three Phase Induction MotorAshok P100% (1)
- Dcmotors and Their RepresentationDocument61 pagesDcmotors and Their RepresentationSoeprapto AtmariPas encore d'évaluation
- Ata 24Document9 pagesAta 24Prince AbbasPas encore d'évaluation
- 1MRK510014-UEN 1 en UserAs Guide REXA 103Document28 pages1MRK510014-UEN 1 en UserAs Guide REXA 103kenneth_fvPas encore d'évaluation
- Injection of EMF in Rotor Circuit PDFDocument5 pagesInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- ED Lab Manual Original - Exp 6 To Exp 10Document33 pagesED Lab Manual Original - Exp 6 To Exp 10Umang MewaraPas encore d'évaluation
- Arduino Based DC Motor Speed ControlDocument12 pagesArduino Based DC Motor Speed Controlprabhu rachutiPas encore d'évaluation
- 17ee82 - Ida - Mod 4 NotesDocument18 pages17ee82 - Ida - Mod 4 NotesManish Kumar SahaniPas encore d'évaluation
- 17ee82 - Ida - Mod 3 NotesDocument38 pages17ee82 - Ida - Mod 3 NotesManish Kumar SahaniPas encore d'évaluation
- Induction Motor: Navigation SearchDocument8 pagesInduction Motor: Navigation SearchSoni Mishra TiwariPas encore d'évaluation
- ZM2119 Wind And Solar Trainer GuideDocument8 pagesZM2119 Wind And Solar Trainer GuideРумен ПоповPas encore d'évaluation
- DC-DC BoostDocument21 pagesDC-DC BoostvinaykumaarPas encore d'évaluation
- 4 - Rotating - Machines - Intro PDFDocument107 pages4 - Rotating - Machines - Intro PDFSantiago Sanchez SotoPas encore d'évaluation
- RF and Microwave Engineering Course SyllabusDocument167 pagesRF and Microwave Engineering Course SyllabusSrinidhi SankarPas encore d'évaluation
- Prof DR Johann W Kolar PDFDocument82 pagesProf DR Johann W Kolar PDFaswardiPas encore d'évaluation
- Publication 1 19208 6043Document13 pagesPublication 1 19208 6043Stephen Velasco Villaruz0% (1)
- JSS ACADEMY BUCK BOOST CONVERTER PROJECT PPTDocument7 pagesJSS ACADEMY BUCK BOOST CONVERTER PROJECT PPTvivek5110% (1)
- EEU453 Industrial DrivesDocument1 pageEEU453 Industrial DrivesSatish NurukurthiPas encore d'évaluation
- EE2403 Special Electrical MachinesDocument19 pagesEE2403 Special Electrical MachinesvasanthavananPas encore d'évaluation
- Efficiency and Regulation of Single-Phase TransformerDocument11 pagesEfficiency and Regulation of Single-Phase Transformersameerpatel15770Pas encore d'évaluation
- Electrical Drives:: Unit - I Drive CharacteristicsDocument22 pagesElectrical Drives:: Unit - I Drive CharacteristicsJegan8586100% (1)
- Eaton Low Voltage MCC Design Guide Dg043001en 1Document50 pagesEaton Low Voltage MCC Design Guide Dg043001en 1diegoPas encore d'évaluation
- G2 Consulting - Motor Design and Power Electronics Course OverviewDocument188 pagesG2 Consulting - Motor Design and Power Electronics Course OverviewFehan Arif MalikPas encore d'évaluation
- Electric Machines BasicsDocument8 pagesElectric Machines BasicsPrasad SogaladPas encore d'évaluation
- The Basics of Stepping MotorsDocument6 pagesThe Basics of Stepping MotorsSherif EltoukhiPas encore d'évaluation
- Practical Design and Optimization of Buck ConvertersDocument97 pagesPractical Design and Optimization of Buck ConvertersAdolfo Valdez Bahena100% (1)
- Transient Analysis of Synchronous Machines.Document131 pagesTransient Analysis of Synchronous Machines.Gaurav SapkotaPas encore d'évaluation
- How to Eliminate Persistent Bearing Currents in MotorsDocument7 pagesHow to Eliminate Persistent Bearing Currents in MotorsSUNIL TVPas encore d'évaluation
- End Winding Vibration Hydro GeneratorDocument5 pagesEnd Winding Vibration Hydro Generatorpatel chandramaniPas encore d'évaluation
- Lab 14 - 3-Phase AlternatorDocument7 pagesLab 14 - 3-Phase AlternatorjalilemadiPas encore d'évaluation
- LPC 2129Document44 pagesLPC 2129Pra ReddyPas encore d'évaluation
- PMBLDC Motor DriveDocument55 pagesPMBLDC Motor DriveSushant SinghPas encore d'évaluation
- Chapter 4Document38 pagesChapter 4WANPas encore d'évaluation
- Traction Motor DesignDocument11 pagesTraction Motor DesignS.m. FerdousPas encore d'évaluation
- Induction Motor (ALL TOPICS)Document33 pagesInduction Motor (ALL TOPICS)Ramprakash89% (18)
- Chapter 5 - AC Machine - Part2Document48 pagesChapter 5 - AC Machine - Part2Mahesh PushpakumaraPas encore d'évaluation
- Q SLTNDocument20 pagesQ SLTNOruc MusayevPas encore d'évaluation
- MT02 SLTNDocument9 pagesMT02 SLTNOruc MusayevPas encore d'évaluation
- USARSim ManualDocument51 pagesUSARSim ManualOruc MusayevPas encore d'évaluation
- 10 11 EMEC DCmachinesDocument38 pages10 11 EMEC DCmachinesOruc MusayevPas encore d'évaluation
- List 1: IELTS Academic WordlistDocument5 pagesList 1: IELTS Academic WordlistAnjana KumaraPas encore d'évaluation
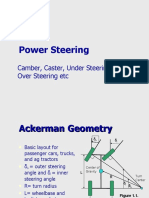
- Power Steering: Camber, Caster, Under Steering, Over Steering EtcDocument63 pagesPower Steering: Camber, Caster, Under Steering, Over Steering EtcShravan Bunny DuaPas encore d'évaluation
- Multistage Boiler Feed Water PumpDocument12 pagesMultistage Boiler Feed Water Pumpbalaji_jayadeva9546100% (1)
- RoofBolter - Technical Specification-FinalDocument5 pagesRoofBolter - Technical Specification-FinalSushantPas encore d'évaluation
- Technical Report: Design of Metal Anchors For Use in Concrete Under Seismic ActionsDocument16 pagesTechnical Report: Design of Metal Anchors For Use in Concrete Under Seismic ActionsJulioGoesPas encore d'évaluation
- Amblygon Ta 15-2: Product InformationDocument2 pagesAmblygon Ta 15-2: Product InformationGregory Alan Francisco IIPas encore d'évaluation
- 4 K53 Code C1 Pre Trip 1Document2 pages4 K53 Code C1 Pre Trip 1abubakr fingerPas encore d'évaluation
- Solidworks Simulation BasicsDocument28 pagesSolidworks Simulation BasicsvinunfPas encore d'évaluation
- Dean Brochure High TempDocument10 pagesDean Brochure High TempAntonio VelardePas encore d'évaluation
- Manual NovaturnDocument86 pagesManual NovaturnVictor SerranoPas encore d'évaluation
- Design of Drag-Link Mechanisms With Optimum Transmission AngleDocument5 pagesDesign of Drag-Link Mechanisms With Optimum Transmission AngleNigussie AdemPas encore d'évaluation
- FAGOR Innovation 8kgDocument22 pagesFAGOR Innovation 8kgmenloparckPas encore d'évaluation
- Mech 346 Heat TransferDocument2 pagesMech 346 Heat Transferlava_lifePas encore d'évaluation
- (Datasheet) Eriks - Ketron Peek-1000Document2 pages(Datasheet) Eriks - Ketron Peek-1000Carlos AlbertoPas encore d'évaluation
- Wire Rope Install GuideDocument65 pagesWire Rope Install GuideChe AjeekPas encore d'évaluation
- Ansys Fluent Simulation ReportDocument7 pagesAnsys Fluent Simulation Reportsaitharun reddy.munthaPas encore d'évaluation
- Probset4. EnergybalancesDocument4 pagesProbset4. EnergybalancesUmmu Qurratul Aini MansorPas encore d'évaluation
- Threads Unc, Unf, UnefDocument3 pagesThreads Unc, Unf, UnefIlya FuksmanPas encore d'évaluation
- Thermal Relief Valves: From The Automation List Department..Document1 pageThermal Relief Valves: From The Automation List Department..Sofyan HadiPas encore d'évaluation
- Accelerator Ap PsDocument2 pagesAccelerator Ap PsRazvan RaduPas encore d'évaluation
- Catalog Echipamente de Gresat Si Transfer Ulei PressolDocument104 pagesCatalog Echipamente de Gresat Si Transfer Ulei PressolvalentinPas encore d'évaluation
- Parts of A CarDocument5 pagesParts of A CarMaria MolinaPas encore d'évaluation
- 11 10K Double Cameron U BOPDocument2 pages11 10K Double Cameron U BOPbalaji baluPas encore d'évaluation
- Overallstructure PDFDocument11 pagesOverallstructure PDFChhoan NhunPas encore d'évaluation
- Mould Ejection OptDocument50 pagesMould Ejection OptMohamed HassanPas encore d'évaluation
- Design Handbook IRC112Document111 pagesDesign Handbook IRC112zulfekharPas encore d'évaluation
- 2006 VA Powertrain SprinterDocument292 pages2006 VA Powertrain Sprinteractuator79100% (2)
- Tpi 31 - VVKN - enDocument13 pagesTpi 31 - VVKN - enKundzoPas encore d'évaluation
- E-Tivity 4.1 Tutorials On GovernorsDocument1 pageE-Tivity 4.1 Tutorials On GovernorsMugisha OlivierPas encore d'évaluation
- 32 Landing GearDocument176 pages32 Landing GearMaria Fernanda Nuñez RuizPas encore d'évaluation