Vous aimerez peut-être aussi
- Información PerúDocument5 pagesInformación PerúMaría Clemencia Toca GalloPas encore d'évaluation
- Historia Del Arte 2Document3 pagesHistoria Del Arte 2María Clemencia Toca GalloPas encore d'évaluation
- Interruptor de NivelDocument2 pagesInterruptor de NivelMaría Clemencia Toca GalloPas encore d'évaluation
- Información PerúDocument5 pagesInformación PerúMaría Clemencia Toca GalloPas encore d'évaluation
- Curva de CargaDocument8 pagesCurva de CargaMaría Clemencia Toca GalloPas encore d'évaluation
- El Estilo Benvenuto CelliniDocument2 pagesEl Estilo Benvenuto CelliniMaría Clemencia Toca GalloPas encore d'évaluation
- Plata Form AsDocument1 pagePlata Form AsMaría Clemencia Toca GalloPas encore d'évaluation
- Model Amien ToDocument2 pagesModel Amien ToMaría Clemencia Toca GalloPas encore d'évaluation
- Deteccion de FallaDocument1 pageDeteccion de FallaMaría Clemencia Toca GalloPas encore d'évaluation
- Compensación de Herramientas de Corte en Altura G43 y G44Document2 pagesCompensación de Herramientas de Corte en Altura G43 y G44María Clemencia Toca Gallo33% (3)
- Ciclo Bryton AbiertoDocument1 pageCiclo Bryton AbiertoMaría Clemencia Toca GalloPas encore d'évaluation
- Asi NoDocument5 pagesAsi NoMaría Clemencia Toca GalloPas encore d'évaluation
- SuperconductividadDocument2 pagesSuperconductividadMaría Clemencia Toca GalloPas encore d'évaluation
- Compensación de Herramientas de Corte en Altura G43 y G44Document2 pagesCompensación de Herramientas de Corte en Altura G43 y G44María Clemencia Toca Gallo33% (3)
- Inf EleDocument4 pagesInf EleMaría Clemencia Toca GalloPas encore d'évaluation
- Diagramas Esfuerzo DeformacionDocument4 pagesDiagramas Esfuerzo DeformacionMaría Clemencia Toca GalloPas encore d'évaluation
- AutoDocument6 pagesAutoMaría Clemencia Toca GalloPas encore d'évaluation
- Efecto Hall EfecDocument2 pagesEfecto Hall EfecMaría Clemencia Toca GalloPas encore d'évaluation
- SuperDocument2 pagesSuperMaría Clemencia Toca GalloPas encore d'évaluation
- Efecto Hall EfecDocument2 pagesEfecto Hall EfecMaría Clemencia Toca GalloPas encore d'évaluation
- Efecto HallDocument3 pagesEfecto HallMaría Clemencia Toca GalloPas encore d'évaluation
- Circuitos Trifásicos Cargas en yDocument3 pagesCircuitos Trifásicos Cargas en yMaría Clemencia Toca GalloPas encore d'évaluation
- INFORME de Centrado CorrecDocument11 pagesINFORME de Centrado CorrecMaría Clemencia Toca GalloPas encore d'évaluation
- PROCEDIMIENTO y Calculos Roscado1Document3 pagesPROCEDIMIENTO y Calculos Roscado1María Clemencia Toca GalloPas encore d'évaluation
- CALCULOSDocument1 pageCALCULOSMaría Clemencia Toca GalloPas encore d'évaluation
- Tablas 1Document1 pageTablas 1María Clemencia Toca GalloPas encore d'évaluation
- Android LLDocument1 pageAndroid LLMaría Clemencia Toca GalloPas encore d'évaluation
- Campo de AcciónDocument1 pageCampo de AcciónMaría Clemencia Toca GalloPas encore d'évaluation
- Art7 Histología de AnfibiosDocument7 pagesArt7 Histología de AnfibiosIvette AreliPas encore d'évaluation
- Ingeniería petrolera control asignación responsabilidades docentesDocument30 pagesIngeniería petrolera control asignación responsabilidades docentesalvarex007Pas encore d'évaluation
- Ejemplos Resueltos Limites TrigonométricosDocument3 pagesEjemplos Resueltos Limites TrigonométricosJessi VelazquezPas encore d'évaluation
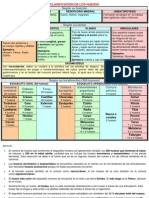
- Clasificacion de Los Huesos PDFDocument1 pageClasificacion de Los Huesos PDFÓscar Daniel Caparrós Martínez84% (37)
- FabaceasDocument4 pagesFabaceasWalther VargasPas encore d'évaluation
- Resumen Posibilidades, Preferencias Y EleccionesDocument11 pagesResumen Posibilidades, Preferencias Y EleccionesIrving Eduardo Tarango ContrerasPas encore d'évaluation
- Los 7 Cuerpos Del SerDocument6 pagesLos 7 Cuerpos Del SerMarcus Elsi Reyna. González100% (1)
- Dismenorrea Primaria LibroDocument6 pagesDismenorrea Primaria LibroMilagros CAPas encore d'évaluation
- El Maestro Lucas CabelloDocument24 pagesEl Maestro Lucas CabelloEstrella ApristaPas encore d'évaluation
- Guía ElectroquimicaDocument4 pagesGuía ElectroquimicaJosefina OrtizPas encore d'évaluation
- Azul Turquesa Blanco Corazón Vector Médico FolletoDocument2 pagesAzul Turquesa Blanco Corazón Vector Médico FolletoHenry Wladimir Cóndor SinchiguanoPas encore d'évaluation
- Analizador de Espectro FinalDocument12 pagesAnalizador de Espectro FinalChus ChafloquePas encore d'évaluation
- Normativa Tarifaria SPTMFDocument17 pagesNormativa Tarifaria SPTMFJuan M NJPas encore d'évaluation
- Bruce Lipton-La Biologà - A de Las CreenciasDocument33 pagesBruce Lipton-La Biologà - A de Las CreenciasMaru LissaPas encore d'évaluation
- Banco de Preguntas PCADocument148 pagesBanco de Preguntas PCAAstrid Jackeline Ortiz MontoyaPas encore d'évaluation
- Novena de Preparación Por El XXV Aniversario Mayo A Septiembre 2013Document12 pagesNovena de Preparación Por El XXV Aniversario Mayo A Septiembre 2013Fernanda MármolPas encore d'évaluation
- Manual de logopedia e introducción a trastornos del lenguajeDocument16 pagesManual de logopedia e introducción a trastornos del lenguajeAlex J. Gañán Adasme0% (1)
- Prueba Super ZorroDocument11 pagesPrueba Super Zorromaria cabezas100% (1)
- Importancia de La Biologia en Nuestra Vida DiariaDocument3 pagesImportancia de La Biologia en Nuestra Vida DiariaMarco Gómez0% (2)
- Mindray Benevision n12n15n17Document4 pagesMindray Benevision n12n15n17Heidi BluePas encore d'évaluation
- Estructura de Los HongosDocument34 pagesEstructura de Los HongosChristian Brav25% (4)
- Síndromes más comunes: características, causas y tratamientosDocument50 pagesSíndromes más comunes: características, causas y tratamientosangelPas encore d'évaluation
- Planeación Ambiental: Karen Adriana Uribe Salcedo Arquitecta - Magister en Urbanismo Universidad Nacional de ColombiaDocument46 pagesPlaneación Ambiental: Karen Adriana Uribe Salcedo Arquitecta - Magister en Urbanismo Universidad Nacional de ColombiaMARCELA RODRIGUEZ MUÑOZPas encore d'évaluation
- Costos PanDocument31 pagesCostos PanPaula Andrea GuzmanPas encore d'évaluation
- Therasuit Brochure SpanishDocument8 pagesTherasuit Brochure SpanishRuben61Pas encore d'évaluation
- Caso ABC Textil La TelaDocument2 pagesCaso ABC Textil La TelaJhonatan Henry Espinoza Vasquez0% (1)
- Las constelaciones y el calendario lunarDocument129 pagesLas constelaciones y el calendario lunarjhonn zevallos ramosPas encore d'évaluation
- Cuestionario de Transferencia de MasaDocument4 pagesCuestionario de Transferencia de MasaRosenderCardenasPreciadoPas encore d'évaluation
- Grupo 4 Ofrecian SacrificiosDocument6 pagesGrupo 4 Ofrecian SacrificiosSara MoranPas encore d'évaluation
- Definición e Importancía de La Mecanica de SuelosDocument7 pagesDefinición e Importancía de La Mecanica de SuelosMonica CDzPas encore d'évaluation