Vous aimerez peut-être aussi
- Informe de Laboratorio N 10 PLCDocument25 pagesInforme de Laboratorio N 10 PLCLuis George TorresPas encore d'évaluation
- Informe TransformadoresDocument9 pagesInforme TransformadoresMaria Paula MedinaPas encore d'évaluation
- Práctica N°2Document21 pagesPráctica N°2Arturo YosepPas encore d'évaluation
- Cuestionario Previo N°10Document2 pagesCuestionario Previo N°10Pam Zavaleta100% (1)
- Práctica 02 - Leyes de Ohm y Leyes de KirchoffDocument14 pagesPráctica 02 - Leyes de Ohm y Leyes de KirchoffValeria Colque GómezPas encore d'évaluation
- GUIA 6 Contactores Ucsm Laboratorio 6Document4 pagesGUIA 6 Contactores Ucsm Laboratorio 6pechugas laruPas encore d'évaluation
- Ley de Biot Savart Practica de ElectromagnetismoDocument6 pagesLey de Biot Savart Practica de ElectromagnetismoKevin HernandezPas encore d'évaluation
- Pruebas de Circuito AbiertoDocument6 pagesPruebas de Circuito AbiertoJosephLizarragaPas encore d'évaluation
- Informe 10 LectrotecniaDocument9 pagesInforme 10 LectrotecniaNadia ApazaPas encore d'évaluation
- P5 Mandos ElectroneumaticosDocument14 pagesP5 Mandos Electroneumaticosdiego jaulis mirandaPas encore d'évaluation
- Informe 2Document5 pagesInforme 2Jose Carlos Valdivia GonzalesPas encore d'évaluation
- Informe N°2Document10 pagesInforme N°2Edison JhonPas encore d'évaluation
- Tarea 8 - Configuracion Del Instrumento Multifunción Central de Medida PM500!2!1Document15 pagesTarea 8 - Configuracion Del Instrumento Multifunción Central de Medida PM500!2!1Adriano Rodriguez RoquePas encore d'évaluation
- Guía N°7 Motores DC y Motor Ac - DCDocument13 pagesGuía N°7 Motores DC y Motor Ac - DCHumbertoPas encore d'évaluation
- Motor Hidraulico MonografiaDocument10 pagesMotor Hidraulico MonografiaOscar VelardePas encore d'évaluation
- INFORME N°3 - ELECTROTECNIA INDUSTRIAL Esteban - CallupeDocument12 pagesINFORME N°3 - ELECTROTECNIA INDUSTRIAL Esteban - CallupeNando SupraPas encore d'évaluation
- Informe 7 FinalDocument10 pagesInforme 7 Finalcesar canalesPas encore d'évaluation
- Cuestionario Final - Fisica IiiDocument2 pagesCuestionario Final - Fisica IiiKevin SAPas encore d'évaluation
- Informe CNCDocument6 pagesInforme CNCMiguelAngelRodriguezAlvarezPas encore d'évaluation
- Lab02 Rectificador de Onda Completa C23 v3 2021Document15 pagesLab02 Rectificador de Onda Completa C23 v3 202113333323DDDPas encore d'évaluation
- Actividad Grupal N - 02 PDFDocument7 pagesActividad Grupal N - 02 PDFMiguel Angel Luna VegaPas encore d'évaluation
- Informe 5Document10 pagesInforme 5CarlosCaracelaMinayaPas encore d'évaluation
- Rectificador de Media Onda - JMRDocument24 pagesRectificador de Media Onda - JMRJOAQUINPas encore d'évaluation
- Null 5Document24 pagesNull 5ahsimPas encore d'évaluation
- Maquinas 5Document9 pagesMaquinas 5Jhonathan Ever Meneses LopezPas encore d'évaluation
- Estructura e Instalacion de Las Maquina de Corriente ContinuaDocument18 pagesEstructura e Instalacion de Las Maquina de Corriente ContinuaCris DrijaPas encore d'évaluation
- Lab 5 Potencia MonofasicaDocument9 pagesLab 5 Potencia MonofasicaBrenda MiriamPas encore d'évaluation
- Lab Electronica 02 NDocument13 pagesLab Electronica 02 NEdgar TelloPas encore d'évaluation
- Tema TransformadoresDocument28 pagesTema TransformadoresEduardo Rodriguez100% (1)
- Laboratorio 1 Electrotecnia IndustrialDocument19 pagesLaboratorio 1 Electrotecnia Industrialneymer parodi lozano0% (1)
- Caracterisitcasndenlansennalnalternann2ndoc 545f60df2795961Document3 pagesCaracterisitcasndenlansennalnalternann2ndoc 545f60df2795961DANIEL GOMEZPas encore d'évaluation
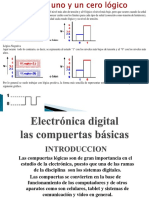
- Compuertas Logicas BasicasDocument15 pagesCompuertas Logicas BasicasCAVHS 2019Pas encore d'évaluation
- (PDF) Prob Magneto - CompressDocument42 pages(PDF) Prob Magneto - CompressBrandom Antonio Cervantes SacachipanaPas encore d'évaluation
- Describa y Analice La Operación Del Circuito RLC Cuando Está Configurado en SerieDocument5 pagesDescriba y Analice La Operación Del Circuito RLC Cuando Está Configurado en Seriecinthya13750% (2)
- RoboticaDocument22 pagesRoboticaOliver Vasquez100% (1)
- INFORME LABORATORIO TERMOFLUIDOS Ley de JouleDocument4 pagesINFORME LABORATORIO TERMOFLUIDOS Ley de JouleWOllyPas encore d'évaluation
- Estructura e Instalación de Las Máquinas de Corriente ContinuaDocument7 pagesEstructura e Instalación de Las Máquinas de Corriente ContinuaChristian Gary salas MoleroPas encore d'évaluation
- Arranque Por AutotransformadorDocument14 pagesArranque Por AutotransformadorMiiguel Angel Legua50% (2)
- Sensor LM35Document4 pagesSensor LM35Itzeel Castañedaa100% (1)
- Lab 555555Document10 pagesLab 555555Mijahel Arcos Nuñez100% (1)
- Guia de Aprendizaje S6Document16 pagesGuia de Aprendizaje S6José SuárezPas encore d'évaluation
- Inversión de Marcha Del Motor Asíncrono Trifásico Con ContactoresDocument5 pagesInversión de Marcha Del Motor Asíncrono Trifásico Con ContactoresJosé Felipe Medina ArboledaPas encore d'évaluation
- Materiales Instrumentos y Accesorios Basicos para El TrazadoDocument1 pageMateriales Instrumentos y Accesorios Basicos para El TrazadoCristhian CrespoPas encore d'évaluation
- Informe de KirchhoffDocument9 pagesInforme de KirchhoffCarlos Eduardo Bernedo FloresPas encore d'évaluation
- CLP U1. Control EléctricoDocument39 pagesCLP U1. Control EléctricoEduardo ZamudioPas encore d'évaluation
- Teoria EjerciciosDocument15 pagesTeoria Ejerciciospromec2010Pas encore d'évaluation
- Laboratorio 4 FinalDocument9 pagesLaboratorio 4 FinalJohnKreamerPas encore d'évaluation
- Sensores de Posicion MonografiaDocument22 pagesSensores de Posicion MonografiaAlex PAPas encore d'évaluation
- Universidad Católica de Santa MaríaDocument12 pagesUniversidad Católica de Santa MaríaaleszandroPas encore d'évaluation
- 7 Máquinas Rotativas de Corriente ContinuaDocument6 pages7 Máquinas Rotativas de Corriente ContinuadanielixtoPas encore d'évaluation
- Informe Sensor de Proximidad Cny70Document8 pagesInforme Sensor de Proximidad Cny70CristianSaldañaPas encore d'évaluation
- Contador AsincronoDocument38 pagesContador AsincronoErik MaisinchoPas encore d'évaluation
- DiodosDocument3 pagesDiodosCarlos Benjamin EspinosaPas encore d'évaluation
- Protocolo de Seguridad en El Laboratorio de ElectricidadDocument2 pagesProtocolo de Seguridad en El Laboratorio de ElectricidadJaime Franksue Sullon LiPas encore d'évaluation
- Electronica Lab 2Document14 pagesElectronica Lab 2Roberth Junior Luque Giron50% (2)
- Informe 5 Arranque Directo Con Inversion de Giro-Rele Falta de FaseDocument8 pagesInforme 5 Arranque Directo Con Inversion de Giro-Rele Falta de FaseBenjamin TorricoPas encore d'évaluation
- Funcionamiento Del Circuito Circuito On-Off Con Temporizador 555 y PulsadorDocument1 pageFuncionamiento Del Circuito Circuito On-Off Con Temporizador 555 y PulsadorDIEGO LCPas encore d'évaluation
- Laboratorio #01Document16 pagesLaboratorio #01Sheyla Elizabeth Santamaria RoquePas encore d'évaluation
- Informe 6Document43 pagesInforme 6juanalberto1234Pas encore d'évaluation
- Practica N°2 Cade SimuDocument14 pagesPractica N°2 Cade SimuEduardo José Mejía Valle100% (1)
- Especificaciones Tecnicas de MaterialesDocument10 pagesEspecificaciones Tecnicas de MaterialesMijael Huaman SaavedraPas encore d'évaluation
- Arranque Estrella/Triangulo de Motor Asíncrono Trifásico Con ContactoresDocument6 pagesArranque Estrella/Triangulo de Motor Asíncrono Trifásico Con ContactoresMijael Huaman SaavedraPas encore d'évaluation
- Emc 2 145 45Document166 pagesEmc 2 145 45Mijael Huaman SaavedraPas encore d'évaluation
- SDADASDDocument4 pagesSDADASDMijael Huaman SaavedraPas encore d'évaluation
- Guia 1-2 ResueltaDocument10 pagesGuia 1-2 ResueltaMijael Huaman SaavedraPas encore d'évaluation
- Justificación Teórica Y Económica de La Utilización de Los Sistemas TrifásicosDocument2 pagesJustificación Teórica Y Económica de La Utilización de Los Sistemas TrifásicosMijael Huaman SaavedraPas encore d'évaluation
- Teoria SoldaduraDocument9 pagesTeoria SoldaduraMijael Huaman SaavedraPas encore d'évaluation
- Formato de Visualizacion de Videos TécnicosDocument7 pagesFormato de Visualizacion de Videos TécnicosMijael Huaman SaavedraPas encore d'évaluation
- Niveles de Organización de Los Seres VivosDocument5 pagesNiveles de Organización de Los Seres VivosMijael Huaman SaavedraPas encore d'évaluation
- CB400i EspañolDocument2 pagesCB400i EspañolJose AzañaPas encore d'évaluation
- P0287 - F002 Autorización de Ingreso ENGIE 2018 (Gamma Soluciones)Document4 pagesP0287 - F002 Autorización de Ingreso ENGIE 2018 (Gamma Soluciones)Anonymous kU3uh2dZ5IPas encore d'évaluation
- Ucc4011 01Document67 pagesUcc4011 01Junior MartinezPas encore d'évaluation
- IE0308 GuiaExp2Document2 pagesIE0308 GuiaExp2Bryan MendezPas encore d'évaluation
- ElectricidadDocument4 pagesElectricidadJesus BaronaPas encore d'évaluation
- Reacciones QuimicaDocument4 pagesReacciones QuimicaMiguel Huamani PorrasPas encore d'évaluation
- Taller-Señales (ELECTRONICA ANALOGA)Document8 pagesTaller-Señales (ELECTRONICA ANALOGA)felipe berrioPas encore d'évaluation
- Impresora lx300Document2 pagesImpresora lx300Marlon VásquezPas encore d'évaluation
- Catalogo Completo Physis PDFDocument168 pagesCatalogo Completo Physis PDFÁlvaro MancillaPas encore d'évaluation
- Generaciones de La Computadora 2Document10 pagesGeneraciones de La Computadora 2Nallely VargasPas encore d'évaluation
- CartaDocument33 pagesCartaRichter BQPas encore d'évaluation
- La BrújulaDocument2 pagesLa Brújulagematecno100% (2)
- Control de Un Horno EléctricoDocument5 pagesControl de Un Horno EléctricoJuan Carlos QuinchuelaPas encore d'évaluation
- ERP CMR Beta10 Software Dossier v12Document28 pagesERP CMR Beta10 Software Dossier v12GustavoPas encore d'évaluation
- Sacar Ecuacion de Un Circuito RLCDocument18 pagesSacar Ecuacion de Un Circuito RLCJuan Carlos CaballeroPas encore d'évaluation
- Capacidades Calorificas Galio Indio CobreDocument5 pagesCapacidades Calorificas Galio Indio CobreAlexXhngPas encore d'évaluation
- Partículas MagnéticasDocument4 pagesPartículas MagnéticasEnrique LivingstonPas encore d'évaluation
- Tabla de SimbolosDocument5 pagesTabla de SimbolosOctavio GutierrezPas encore d'évaluation
- ANALISIS de DEMANDA - Ejercicios - Instalaciones Electricas IIDocument14 pagesANALISIS de DEMANDA - Ejercicios - Instalaciones Electricas IIcapoamilcar60% (5)
- Revisar y Reparar Discos Duros Con CHKDSK Usando La Linea de ComandosDocument9 pagesRevisar y Reparar Discos Duros Con CHKDSK Usando La Linea de ComandosSergio Hernán Moreno MussinPas encore d'évaluation
- 01 R PDFDocument6 pages01 R PDFFco. Javier PinoPas encore d'évaluation
- Lab Trsnformadores 3.1 y 3-1Document24 pagesLab Trsnformadores 3.1 y 3-1San Maycol Fiel100% (1)
- Formato Dc5 Solicitud de Registro de Agente Capacitador ExternoDocument2 pagesFormato Dc5 Solicitud de Registro de Agente Capacitador ExternoTania Hernández57% (14)
- Guia3delaboratoriodeelectroneumatica2020 IiDocument5 pagesGuia3delaboratoriodeelectroneumatica2020 IiJherson Denys Contreras RamosPas encore d'évaluation
- Guía para Torque de Atlas CopcoDocument4 pagesGuía para Torque de Atlas CopcoDiego YepesPas encore d'évaluation
- Circuito Interruptor Con AplausosDocument15 pagesCircuito Interruptor Con AplausosYasser Curasma Muñoz100% (1)
- Elementos Quimicos Por GruposDocument12 pagesElementos Quimicos Por GruposAlex Lora67% (3)
- Nom 035 SCT2 2010Document17 pagesNom 035 SCT2 2010dorbarelPas encore d'évaluation
- Laboratio 2 Fisica ElectronicaDocument9 pagesLaboratio 2 Fisica ElectronicaAnonymous ggRLGRbPas encore d'évaluation