Vous aimerez peut-être aussi
- Thief 2 The Metal Age ManualDocument33 pagesThief 2 The Metal Age ManualMordenGreyPas encore d'évaluation
- Creative Photography Lab 52 Fun Exercises For Developing Self-Expression With Your CameraDocument146 pagesCreative Photography Lab 52 Fun Exercises For Developing Self-Expression With Your Camerajwestmister100% (2)
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalPas encore d'évaluation
- Polar Moment of Inertia ExperimentDocument17 pagesPolar Moment of Inertia Experimentsohail parachaPas encore d'évaluation
- Eee-Vi-power System Analysis and Stability (10ee61) - NotesDocument119 pagesEee-Vi-power System Analysis and Stability (10ee61) - NotesNurul Islam Faruk0% (1)
- (Advances in Biochemical Engineering - Biotechnology 119) Takayuki Nishizaka (Auth.), Isao Endo, Teruyuki Nagamune (Eds.) - Nano - Micro Biotechnology (2010, Springer-Verlag Berlin Heidelberg) PDFDocument271 pages(Advances in Biochemical Engineering - Biotechnology 119) Takayuki Nishizaka (Auth.), Isao Endo, Teruyuki Nagamune (Eds.) - Nano - Micro Biotechnology (2010, Springer-Verlag Berlin Heidelberg) PDFAlejandra EscalonaPas encore d'évaluation
- Aim of ExperimentDocument6 pagesAim of ExperimentPrabhu Dev50% (2)
- Chapter 2: DC Circuit TheoryDocument37 pagesChapter 2: DC Circuit TheoryTaonga NhambiPas encore d'évaluation
- Expt - 3 - Verification of Reciprocity Theorem For Ac CircuitsDocument3 pagesExpt - 3 - Verification of Reciprocity Theorem For Ac CircuitsChaitanya Vivek DeshpandePas encore d'évaluation
- Open circuit and load characteristics of DC shunt generatorDocument5 pagesOpen circuit and load characteristics of DC shunt generatorramniwas123Pas encore d'évaluation
- Government Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesDocument18 pagesGovernment Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesVK DPas encore d'évaluation
- Voltage Distribution Across Insulator StringDocument3 pagesVoltage Distribution Across Insulator Stringarjuna4306Pas encore d'évaluation
- Lab #2 - Phase SequenceDocument6 pagesLab #2 - Phase SequenceJorge GuerreroPas encore d'évaluation
- Verification of Network Theorems Using MATLABDocument32 pagesVerification of Network Theorems Using MATLABViresh100% (1)
- Expt No 1Document5 pagesExpt No 1sanjuPas encore d'évaluation
- Determination of The Equivalent Circuit Parameters of A Transformer and Calculation of Efficiency and Regulation Using Equivalent CircuitDocument4 pagesDetermination of The Equivalent Circuit Parameters of A Transformer and Calculation of Efficiency and Regulation Using Equivalent CircuitMd Rion100% (1)
- As Physics Electricity Chapter 9Document17 pagesAs Physics Electricity Chapter 9LawrenceOnthugaPas encore d'évaluation
- Lab ExperimentDocument6 pagesLab ExperimentWaseem Abbas100% (3)
- EEP305 Electric Drives Laboratory PDFDocument14 pagesEEP305 Electric Drives Laboratory PDFAmit Singh100% (1)
- Devices & Circuits RLC CircuitsDocument28 pagesDevices & Circuits RLC CircuitsANJALI DEOREPas encore d'évaluation
- Cam Analysis ManualDocument4 pagesCam Analysis ManualNishant B MayekarPas encore d'évaluation
- Physics 1 Lab | Determine Time Constant of RC CircuitDocument5 pagesPhysics 1 Lab | Determine Time Constant of RC Circuitf wPas encore d'évaluation
- Problems Chapter 5 1Document7 pagesProblems Chapter 5 1Siva KumarPas encore d'évaluation
- Sono and MeldesDocument9 pagesSono and MeldesFACTICAPas encore d'évaluation
- Brushless DC MotorDocument3 pagesBrushless DC MotorSourav KumarPas encore d'évaluation
- Magnetization Characteristics of A D.C. Shunt Generator: Exp. No: DateDocument60 pagesMagnetization Characteristics of A D.C. Shunt Generator: Exp. No: DateSuyash SinghPas encore d'évaluation
- ENA Lab 9 Balanced Three-Phase Circuit (Software)Document12 pagesENA Lab 9 Balanced Three-Phase Circuit (Software)Mohammed Ahmad OsamaPas encore d'évaluation
- Transient of R.C. CircuitDocument9 pagesTransient of R.C. CircuitArinder SinghPas encore d'évaluation
- 3.whirling of ShaftDocument3 pages3.whirling of ShaftRishi ShuklaPas encore d'évaluation
- Question Bank Ac MachinesDocument4 pagesQuestion Bank Ac Machinesashwin paulPas encore d'évaluation
- Hopkinson Test On DC Shunt MotorDocument5 pagesHopkinson Test On DC Shunt MotorVarun VadluriPas encore d'évaluation
- Wireless Stepper Motor ControlDocument2 pagesWireless Stepper Motor ControlHarsha100% (1)
- Measuring Instruments and Circuit Elements Lab ExperimentDocument38 pagesMeasuring Instruments and Circuit Elements Lab ExperimentSaif KhanPas encore d'évaluation
- Electronic Circuits & Logic Design Lab ManualDocument83 pagesElectronic Circuits & Logic Design Lab ManualsunandaalurPas encore d'évaluation
- Pitch Factor N Distribution FactorDocument5 pagesPitch Factor N Distribution FactorKim KeatPas encore d'évaluation
- VTU Guide Measures Resistance Using Wheatstone BridgeDocument18 pagesVTU Guide Measures Resistance Using Wheatstone Bridgevnyshreyas100% (2)
- Anderson Bridge: User ManualDocument12 pagesAnderson Bridge: User Manualaa_nilawarPas encore d'évaluation
- DC Machines Lab ManualDocument56 pagesDC Machines Lab ManualRockstar RichPas encore d'évaluation
- FINAL IE Lab ManualDocument34 pagesFINAL IE Lab ManualAnudeex ShettyPas encore d'évaluation
- Determining Cantilever Time Period Using Load vs Depression GraphDocument2 pagesDetermining Cantilever Time Period Using Load vs Depression GraphAshish VermaPas encore d'évaluation
- Linear Circuit AnalysisDocument19 pagesLinear Circuit AnalysisFelixAvilaPas encore d'évaluation
- Study of CRODocument7 pagesStudy of CROGarima Saraf100% (1)
- Verification of Reciprocity Theorem AIMDocument4 pagesVerification of Reciprocity Theorem AIMJenifer StalinPas encore d'évaluation
- Lab Report: Submitted ToDocument7 pagesLab Report: Submitted ToMd. Al Amin 201-15-34790% (1)
- What Is The Use of Choke in Florescent TubesDocument7 pagesWhat Is The Use of Choke in Florescent Tubessumanta1981100% (2)
- Transistor Current ComponentsDocument3 pagesTransistor Current ComponentsDiptendu MitraPas encore d'évaluation
- DC Machines Lab Manual PDFDocument54 pagesDC Machines Lab Manual PDFMuralichintakailuPas encore d'évaluation
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDocument3 pagesExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalPas encore d'évaluation
- Emf Equation of AlternatorDocument2 pagesEmf Equation of AlternatorThe Engineers EDGE, CoimbatorePas encore d'évaluation
- Circuit Thoery Lab ManualDocument57 pagesCircuit Thoery Lab ManualsrisairampolyPas encore d'évaluation
- Experiment - 12: Power Angle Curve of Syncronous MachineDocument3 pagesExperiment - 12: Power Angle Curve of Syncronous MachinesanjuPas encore d'évaluation
- Transformer Design Module 2 NewDocument17 pagesTransformer Design Module 2 NewRajath SuryaPas encore d'évaluation
- Final Applied Physics Lab ManualDocument57 pagesFinal Applied Physics Lab ManualHuma MalikPas encore d'évaluation
- Superposition Theorem (BTEE-211) (U-1, P-1)Document10 pagesSuperposition Theorem (BTEE-211) (U-1, P-1)Bernard BraingixPas encore d'évaluation
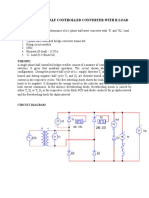
- Single Phase Half Controlled Converter With R LoadDocument3 pagesSingle Phase Half Controlled Converter With R LoadB ANIL KUMARPas encore d'évaluation
- Retardation TestDocument5 pagesRetardation TestAnkit Shetty100% (1)
- Unit IIIDocument23 pagesUnit IIIudhayabarathiPas encore d'évaluation
- Electronic Voltmeter: Advantage Over Conventional Multi MeterDocument7 pagesElectronic Voltmeter: Advantage Over Conventional Multi MeterVishal Pandey M LE 06Pas encore d'évaluation
- LEP 4.1.03 Internal Resistance and Matching in Voltage SourceDocument4 pagesLEP 4.1.03 Internal Resistance and Matching in Voltage SourceJohn CraftPas encore d'évaluation
- Experiment: Title: DC Power Supply Unit: Transformer ObjectiveDocument14 pagesExperiment: Title: DC Power Supply Unit: Transformer ObjectiveLian Ai Chen100% (1)
- Measure Unknown Inductance Using Maxwell BridgeDocument2 pagesMeasure Unknown Inductance Using Maxwell Bridgemigman99Pas encore d'évaluation
- Unit 1 BEEEDocument77 pagesUnit 1 BEEERAMESHBABU SEKARPas encore d'évaluation
- ExptDocument7 pagesExptkshitij kumarPas encore d'évaluation
- ULN2803AGPDocument12 pagesULN2803AGPFernando SandovalPas encore d'évaluation
- Career Building in Computer Science: About The ProgrammeDocument2 pagesCareer Building in Computer Science: About The Programmekshitij kumarPas encore d'évaluation
- Electrical Engineering: Syllabus of Undergraduate Degree CourseDocument14 pagesElectrical Engineering: Syllabus of Undergraduate Degree CourseHìmåñshū GøyâlPas encore d'évaluation
- Signature PDFDocument1 pageSignature PDFkshitij kumarPas encore d'évaluation
- SignatureDocument1 pageSignaturekshitij kumarPas encore d'évaluation
- C# Abstract Classes and Interfaces ExplainedDocument20 pagesC# Abstract Classes and Interfaces ExplainedshubhamPas encore d'évaluation
- 81/253/INF For IEC Use Only 2004-08-27 International Electrotechnical Commission Technical Committee No. 81: Lightning ProtectionDocument3 pages81/253/INF For IEC Use Only 2004-08-27 International Electrotechnical Commission Technical Committee No. 81: Lightning ProtectionAndres Felipe Muñoz APas encore d'évaluation
- MMP - Intro To ElectronicDocument12 pagesMMP - Intro To ElectronicAye Chan OoPas encore d'évaluation
- About The Business 1.1 Business Profile Positif CorporationDocument7 pagesAbout The Business 1.1 Business Profile Positif CorporationLinh DalanginPas encore d'évaluation
- Project ScopeDocument2 pagesProject ScopeRahul SinhaPas encore d'évaluation
- Industry 4.0 CourseDocument49 pagesIndustry 4.0 CourseThiruvengadam CPas encore d'évaluation
- TIMESHEETDocument5 pagesTIMESHEETWasKito AdyPas encore d'évaluation
- BentleyDocument27 pagesBentleycipele12Pas encore d'évaluation
- Une Preuve Facile de L'existence de Dieu L'ordre Du Monde - Pe. Joseph de Tonquedéc S.JDocument30 pagesUne Preuve Facile de L'existence de Dieu L'ordre Du Monde - Pe. Joseph de Tonquedéc S.JRenan MarquesPas encore d'évaluation
- Forbes Investor Jan2014 Master Buy List PDFDocument1 pageForbes Investor Jan2014 Master Buy List PDFForbesPas encore d'évaluation
- Safety and Reliability in Turbine Sealing CompoundsDocument2 pagesSafety and Reliability in Turbine Sealing CompoundsProject Sales CorpPas encore d'évaluation
- Example Problem Solutions - Chapter 8Document18 pagesExample Problem Solutions - Chapter 8Nguyen Tien DungPas encore d'évaluation
- General DataDocument8 pagesGeneral DataGurvinderpal Singh MultaniPas encore d'évaluation
- Calculation Framework GuideDocument126 pagesCalculation Framework GuidedeeptiakkaPas encore d'évaluation
- Market Plan On Vodafone vs. Pakistani OperatorsDocument47 pagesMarket Plan On Vodafone vs. Pakistani OperatorswebscanzPas encore d'évaluation
- 2Document5 pages2madonnaPas encore d'évaluation
- MD 5 SumDocument47 pagesMD 5 SumBabay Si TagamaPas encore d'évaluation
- The Apparatus of RepressionDocument221 pagesThe Apparatus of RepressionAndrew Charles Hendricks100% (3)
- H Value1Document12 pagesH Value1Sahyog KumarPas encore d'évaluation
- Gas Pressure Regulator Installation InstructionsDocument10 pagesGas Pressure Regulator Installation Instructionssayem biswasPas encore d'évaluation
- 1800 Series Inverted Bucket Steam TrapsDocument2 pages1800 Series Inverted Bucket Steam TrapsIoana PopescuPas encore d'évaluation
- Warning Chime System: SectionDocument77 pagesWarning Chime System: SectionmanualPas encore d'évaluation
- BP Inv Interim ReportDocument47 pagesBP Inv Interim Reportkhashi110Pas encore d'évaluation
- Pub15966 PDFDocument7 pagesPub15966 PDFIoana BădoiuPas encore d'évaluation
- Jarme 3 1 2010Document8 pagesJarme 3 1 2010kannanmech87Pas encore d'évaluation
- Chasis+5Y18+-+FSCQ1265RT LA76933 LA78041 LA42352 BSC23-N0120+Hitachi+CDH-29GFS12 PDFDocument45 pagesChasis+5Y18+-+FSCQ1265RT LA76933 LA78041 LA42352 BSC23-N0120+Hitachi+CDH-29GFS12 PDFdardoPas encore d'évaluation
- TNEB vacancy cut-off datesDocument7 pagesTNEB vacancy cut-off dateswinvenuPas encore d'évaluation