Vous aimerez peut-être aussi
- NETpublicNoticePsychology PDFDocument1 pageNETpublicNoticePsychology PDFNISHANTPas encore d'évaluation
- GATE Aerospace Coaching by Team IGC Aircraft Propulsion BasicsDocument3 pagesGATE Aerospace Coaching by Team IGC Aircraft Propulsion BasicsNISHANTPas encore d'évaluation
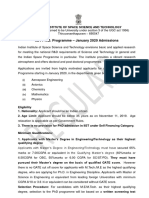
- IIST Ph.D. Programme - January 2020 Admissions: (I) (Ii) (Iii) (Iv) (V)Document13 pagesIIST Ph.D. Programme - January 2020 Admissions: (I) (Ii) (Iii) (Iv) (V)NISHANTPas encore d'évaluation
- GATE Aerospace Coaching by Team IGC Engineering MathematicsDocument5 pagesGATE Aerospace Coaching by Team IGC Engineering MathematicsNISHANTPas encore d'évaluation
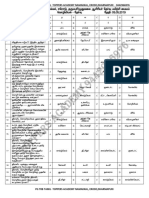
- PG TRB Tamil Unit I Impartent Question Toppers Academy Namakkal PDFDocument8 pagesPG TRB Tamil Unit I Impartent Question Toppers Academy Namakkal PDFNISHANT100% (1)
- Preliminary Design of A Business Jet AircraftDocument9 pagesPreliminary Design of A Business Jet AircraftNISHANTPas encore d'évaluation
- CFD Analysis of Flow Through Rotating Combustion SwirlerDocument4 pagesCFD Analysis of Flow Through Rotating Combustion SwirlerNISHANTPas encore d'évaluation
- GATE Aerospace Coaching by Team IGC Aircraft StabilityDocument13 pagesGATE Aerospace Coaching by Team IGC Aircraft StabilityNISHANT100% (1)
- Common Mode Stability in Fully Differential Voltage Feedback CMOS AmplifiersDocument5 pagesCommon Mode Stability in Fully Differential Voltage Feedback CMOS AmplifiersNISHANTPas encore d'évaluation
- Elegibility Certificate FormatDocument1 pageElegibility Certificate FormatNISHANTPas encore d'évaluation
- Section A: Circle The Correct AnswerDocument10 pagesSection A: Circle The Correct AnswerNISHANTPas encore d'évaluation
- Introduction To CFDDocument2 pagesIntroduction To CFDNISHANTPas encore d'évaluation
- Mixing Enhancement Using Chevron Nozzle: Studies On Free Jets and Confined JetsDocument14 pagesMixing Enhancement Using Chevron Nozzle: Studies On Free Jets and Confined JetsNISHANTPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Fluid MachineryDocument34 pagesFluid MachineryEhtisham ZiaPas encore d'évaluation
- Jis C3771Document2 pagesJis C3771bkprodhPas encore d'évaluation
- 1998 - The Measurement and Control of Blast Induced Damage of Final Pit Walls in Open Pit Mining - W. Adamson, C.Scherpenisse - ISEE-1998Document18 pages1998 - The Measurement and Control of Blast Induced Damage of Final Pit Walls in Open Pit Mining - W. Adamson, C.Scherpenisse - ISEE-1998Elías Bravo CortésPas encore d'évaluation
- AC Question Class 12Document4 pagesAC Question Class 12Abhinav SinghPas encore d'évaluation
- Basic Mechanical Engineering MCQs Part 2Document11 pagesBasic Mechanical Engineering MCQs Part 2Trbman exaPas encore d'évaluation
- PDIL-Stress Analysis Design Basis PDFDocument13 pagesPDIL-Stress Analysis Design Basis PDFDarshan Panchal100% (1)
- Pavc Series Variable Volume Piston Pump: Service Parts GuideDocument10 pagesPavc Series Variable Volume Piston Pump: Service Parts GuideRafael RodriguezPas encore d'évaluation
- A Comparative Study of The Forming-Limit Diagram Next Term Models For Sheet SteelsDocument8 pagesA Comparative Study of The Forming-Limit Diagram Next Term Models For Sheet SteelsRaghav KhajuriaPas encore d'évaluation
- 1 s2.0 S1270963820308646 MainDocument12 pages1 s2.0 S1270963820308646 MainSrushtiPas encore d'évaluation
- A-00 IndexDocument10 pagesA-00 IndexNizarHamrouniPas encore d'évaluation
- LYNX 40 Drilling Mud DecanterDocument2 pagesLYNX 40 Drilling Mud DecanterPierluigi Ciampiconi0% (1)
- RadialDocument214 pagesRadialRogelio Octavio MazacottePas encore d'évaluation
- Ficha Tecnica Crown Rd5200Document6 pagesFicha Tecnica Crown Rd5200Andrey Fernando Luque SeguraPas encore d'évaluation
- Electro 323Document2 pagesElectro 323Pușcă MartinPas encore d'évaluation
- Mill Housings Mangal SinghDocument5 pagesMill Housings Mangal SinghGun SmithPas encore d'évaluation
- Reinforced Cement Concrete QuestionsDocument6 pagesReinforced Cement Concrete QuestionsArmaan Gupta89% (9)
- Incompressible Flow Solution Using SIMPLE AlgorithmDocument26 pagesIncompressible Flow Solution Using SIMPLE AlgorithmxavierPas encore d'évaluation
- Chapter - 3 Boiler 3.1. Basic Boiler SystemDocument11 pagesChapter - 3 Boiler 3.1. Basic Boiler SystemVickyrahuPas encore d'évaluation
- Williams V Dual Seal Plunger 12-2012 PDFDocument12 pagesWilliams V Dual Seal Plunger 12-2012 PDFDucVikingPas encore d'évaluation
- Welding SymbolsDocument8 pagesWelding SymbolsRaoFarhan100% (1)
- 18V2000G63-TB 0-10000hDocument9 pages18V2000G63-TB 0-10000hNabesterNajamPas encore d'évaluation
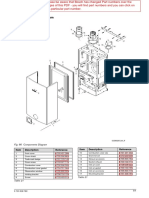
- Interior Components Diagram and Parts ListDocument6 pagesInterior Components Diagram and Parts ListSoluciones Tecnicas GastronomicasPas encore d'évaluation
- 1001 Solved Problems in Engineering Mathematics (Day 20 Engineering Mechanics Dynamics)Document24 pages1001 Solved Problems in Engineering Mathematics (Day 20 Engineering Mechanics Dynamics)maaratjess100% (2)
- BHP - WHP: WHP - Q X Sp. Gr. X Sp. GRDocument1 pageBHP - WHP: WHP - Q X Sp. Gr. X Sp. GRasdasdasdasdPas encore d'évaluation
- ABAQUS UmatDocument15 pagesABAQUS UmatManickavasagam Arun KumarPas encore d'évaluation
- 24a Fuel Injection-Motronic (1.8L)Document14 pages24a Fuel Injection-Motronic (1.8L)Sinisa Gale GacicPas encore d'évaluation
- STPM 2015 Term 1 Trial SMK Sultan Abdul Hamid QuestionsDocument9 pagesSTPM 2015 Term 1 Trial SMK Sultan Abdul Hamid QuestionsSouseiseki ChromePas encore d'évaluation
- Akulon Ultraflow InjectionDocument2 pagesAkulon Ultraflow InjectionAMBSpainPas encore d'évaluation
- Hydraulic Control Valve - 753Document6 pagesHydraulic Control Valve - 753Luis EnriquePas encore d'évaluation
- DC GeneratorDocument26 pagesDC GeneratorAbhijith Mohanan NPas encore d'évaluation