Vous aimerez peut-être aussi
- Modélisation Cinématique Des MécanismesDocument8 pagesModélisation Cinématique Des MécanismesmounirgemPas encore d'évaluation
- Construction MécaniqueDocument250 pagesConstruction MécaniqueSimo MabrouukPas encore d'évaluation
- CH-2 - Mécanisme & Composants MécaniquesDocument150 pagesCH-2 - Mécanisme & Composants MécaniquesMaha El allaouiPas encore d'évaluation
- TD 2 Liaisons Schéma CinématiqueDocument6 pagesTD 2 Liaisons Schéma CinématiqueNadhir MehellouPas encore d'évaluation
- TD 30 - Représentation D'une Fonction Logique PDFDocument4 pagesTD 30 - Représentation D'une Fonction Logique PDFbhs channelPas encore d'évaluation
- Liaisons Schema EleveDocument2 pagesLiaisons Schema ElevewoulkanPas encore d'évaluation
- Cours CPGE - Modélisation Des Actions MécaniquesDocument11 pagesCours CPGE - Modélisation Des Actions MécaniquesAnonymous OG8ApT4go100% (2)
- TheseDocument163 pagesTheseŠø FįåÑėPas encore d'évaluation
- DM Quille PendulaireDocument5 pagesDM Quille PendulaireFilouPas encore d'évaluation
- Cours Modelisation Des Liaisons eDocument7 pagesCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- Exercice ReducteurDocument8 pagesExercice ReducteurGyPas encore d'évaluation
- Etau Orientable PDFDocument6 pagesEtau Orientable PDFTALMOUDI HEDIAPas encore d'évaluation
- TD 1 LiaisonsschmacinmatiqueDocument6 pagesTD 1 LiaisonsschmacinmatiqueSamba SallPas encore d'évaluation
- Roue de FrictionDocument4 pagesRoue de Frictionuriel marcel nzambaPas encore d'évaluation
- Représentation GraphiqueDocument7 pagesReprésentation GraphiquetaiebshowPas encore d'évaluation
- TD N°3 PFS Analytique - 3Document6 pagesTD N°3 PFS Analytique - 3Yassine BouchattaPas encore d'évaluation
- devoirN2CotationFonctionelle2AsGriffe2012 PDFDocument4 pagesdevoirN2CotationFonctionelle2AsGriffe2012 PDFlassouedPas encore d'évaluation
- P - Etude6 - Les LiaisonsDocument4 pagesP - Etude6 - Les LiaisonsSamsun GalaxPas encore d'évaluation
- TD Exercice Systeme de Levage Schema CinématiqueDocument3 pagesTD Exercice Systeme de Levage Schema CinématiqueYounes KaderPas encore d'évaluation
- Griffe de TourDocument3 pagesGriffe de TourYahya Aidara100% (1)
- Evaluation Liaison Encastrement EleveDocument4 pagesEvaluation Liaison Encastrement EleveeslochPas encore d'évaluation
- Les Liaisons Fixes Ou Encastrements: Définition de La LiaisonDocument3 pagesLes Liaisons Fixes Ou Encastrements: Définition de La LiaisonIssam GU100% (1)
- 8c64r Projection PDFDocument21 pages8c64r Projection PDFkhalid3mendounPas encore d'évaluation
- FormualireDocument5 pagesFormualireAdil Hassani IdrissiPas encore d'évaluation
- Annexe 05 - Calcul VectorielDocument4 pagesAnnexe 05 - Calcul Vectorielameg15Pas encore d'évaluation
- Devoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotDocument4 pagesDevoir de Contrôle N°1 (DP) - Technologie - 3ème Tech (2009-2010) MR Jemmali Hassen Main de RobotArfaoui AymenPas encore d'évaluation
- ch2 Statique PDFDocument16 pagesch2 Statique PDFConception & Fabrication MécaniquePas encore d'évaluation
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzPas encore d'évaluation
- NnneDocument10 pagesNnneYACOUBA BIYRNPas encore d'évaluation
- TP 2 Solidworks Liaisons Dans Les Mecanismes p1Document8 pagesTP 2 Solidworks Liaisons Dans Les Mecanismes p1Simo StitPas encore d'évaluation
- Support CM1 - EnspdDocument83 pagesSupport CM1 - Enspdappoloniustonye145Pas encore d'évaluation
- Cours Assemblages Complet-1Document7 pagesCours Assemblages Complet-1yasahiro 10100% (1)
- CIN Cours - Cinématique Du Solide Indéformable - CorrigéDocument33 pagesCIN Cours - Cinématique Du Solide Indéformable - CorrigéAlam Castillo Herrera100% (1)
- Transmettre 2SMB Eleve 2014 PDFDocument81 pagesTransmettre 2SMB Eleve 2014 PDFNadia Dridi0% (1)
- Ipeit Ex1 2012Document3 pagesIpeit Ex1 2012JaamesPas encore d'évaluation
- TD Serre JointDocument2 pagesTD Serre JointKamel BousninaPas encore d'évaluation
- TN06 PDFDocument34 pagesTN06 PDFMa HdiPas encore d'évaluation
- 4 - Montage Des Roulements Et Des CoussinetsDocument10 pages4 - Montage Des Roulements Et Des CoussinetsISMAILPas encore d'évaluation
- Chaîne D'energie Fonction Transmettre Solidworks Doc-Prof MoukhtariDocument12 pagesChaîne D'energie Fonction Transmettre Solidworks Doc-Prof MoukhtariELMustaphaELMoukhtariPas encore d'évaluation
- Schéma CinématiqueDocument1 pageSchéma Cinématiquelephilo57Pas encore d'évaluation
- Séries Numériques - 2 PDFDocument23 pagesSéries Numériques - 2 PDFAch Raf100% (1)
- TD Combinatoire TsiDocument5 pagesTD Combinatoire TsikamalPas encore d'évaluation
- Sujets Premiere IHDocument2 pagesSujets Premiere IHChancelin KeukouaPas encore d'évaluation
- Cine Graph EleveDocument8 pagesCine Graph EleveMohammed DahbiPas encore d'évaluation
- DT Micro TourDocument2 pagesDT Micro Tourlou lou0% (1)
- AccouplementsDocument15 pagesAccouplementsSoufi BadrPas encore d'évaluation
- Technologie: ProfDocument113 pagesTechnologie: ProfAmenElleh Shil100% (1)
- Serrage D'une BielleDocument3 pagesSerrage D'une BielleGana100% (2)
- Cours Ajustements eDocument4 pagesCours Ajustements ebakhchouch100% (1)
- Serre Joint Dessin D'ensembleDocument1 pageSerre Joint Dessin D'ensembleAbdeslam Elmrabet100% (1)
- Programme TerminaleDocument9 pagesProgramme TerminalefatihamPas encore d'évaluation
- Cours Coupes Et SectionsDocument12 pagesCours Coupes Et SectionsMohamèd Tlijèni100% (1)
- Modelisation Des Liaisons MecaniquesDocument5 pagesModelisation Des Liaisons MecaniquesayatextPas encore d'évaluation
- Chapitre 1 2019 2020Document96 pagesChapitre 1 2019 2020SaidPas encore d'évaluation
- Les Liaisons Non Permanentes (ASSEMBLAGES) CH 04 1er Année GPLDocument14 pagesLes Liaisons Non Permanentes (ASSEMBLAGES) CH 04 1er Année GPLTom BriderPas encore d'évaluation
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesD'EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesPas encore d'évaluation
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceD'EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficacePas encore d'évaluation
- Cin Et Qu de MVT - 224 - X-2036 PDFDocument71 pagesCin Et Qu de MVT - 224 - X-2036 PDFGuy YgalPas encore d'évaluation
- TSP JulienJomauxDocument24 pagesTSP JulienJomauxGuy YgalPas encore d'évaluation
- 64 Leaflet 55002 2018 FRDocument2 pages64 Leaflet 55002 2018 FRGuy YgalPas encore d'évaluation
- Guide Thematique de Gestion D Actifs 2017Document36 pagesGuide Thematique de Gestion D Actifs 2017Guy YgalPas encore d'évaluation
- Seminaire FrottementsDocument20 pagesSeminaire FrottementsfabienPas encore d'évaluation
- (FS01) Intro Aux Liaisons Meca PDFDocument3 pages(FS01) Intro Aux Liaisons Meca PDFGuy YgalPas encore d'évaluation
- RMChap4 (MomentInertie)Document21 pagesRMChap4 (MomentInertie)ammiwesterPas encore d'évaluation
- I, CDocument17 pagesI, CAzmi AnassPas encore d'évaluation
- Intertie Section IIDocument4 pagesIntertie Section IIFares Feki100% (1)
- Cours de Cinématique - L1Document37 pagesCours de Cinématique - L1Guy Ygal100% (1)
- Chapitre 1 PDFDocument5 pagesChapitre 1 PDFAmine OuaredPas encore d'évaluation
- Chap It Re IIIDocument14 pagesChap It Re IIITedj Amine100% (1)
- Le FrottementDocument12 pagesLe FrottementGuy YgalPas encore d'évaluation
- Differentielle Totale ExacteDocument8 pagesDifferentielle Totale ExacteGuy YgalPas encore d'évaluation
- WL 80 100 - 3 FB-11 - 03Document114 pagesWL 80 100 - 3 FB-11 - 03Soufiane BounezraPas encore d'évaluation
- Climatisation Plusieurs LocauxDocument53 pagesClimatisation Plusieurs LocauxNorfal McAwsome100% (1)
- Sélection Des Matériaux Par L'ingénieurDocument12 pagesSélection Des Matériaux Par L'ingénieurGuy YgalPas encore d'évaluation
- Mecanique GeneraleDocument203 pagesMecanique Generalemanel_drPas encore d'évaluation
- Cours de Physique PDFDocument187 pagesCours de Physique PDFGuy YgalPas encore d'évaluation
- WL 80 100 - 3 FB-11 - 03Document114 pagesWL 80 100 - 3 FB-11 - 03Soufiane BounezraPas encore d'évaluation
- Turbines Et CompresseursDocument70 pagesTurbines Et CompresseursMohamed Amine GharbiPas encore d'évaluation
- Définition Et Cotation Fonctionnelle Des Pièces Mécaniques PDFDocument86 pagesDéfinition Et Cotation Fonctionnelle Des Pièces Mécaniques PDFGuy Ygal100% (1)
- CM MecaniqueDocument47 pagesCM MecaniqueAmine FrajPas encore d'évaluation
- Fiche Cinematique Du PointDocument2 pagesFiche Cinematique Du PointGuy Ygal100% (5)
- CM MecaniqueDocument47 pagesCM MecaniqueAmine FrajPas encore d'évaluation
- MetrologieDocument227 pagesMetrologiemicipsa100% (3)
- La Gestion de Maintenance.1313 PDFDocument97 pagesLa Gestion de Maintenance.1313 PDFGuy YgalPas encore d'évaluation
- Initiation SC Ingenieur PDFDocument53 pagesInitiation SC Ingenieur PDFGuy YgalPas encore d'évaluation
- La Gestion de Maintenance.1313 PDFDocument97 pagesLa Gestion de Maintenance.1313 PDFGuy YgalPas encore d'évaluation
- Fascicule EIAH2013Document44 pagesFascicule EIAH2013gifiPas encore d'évaluation
- Métabolisme GlucidiqueDocument2 pagesMétabolisme GlucidiqueAro MandaPas encore d'évaluation
- Fiche ComDocument1 pageFiche ComBenguitoun MohamedPas encore d'évaluation
- Chapitre 2Document17 pagesChapitre 2Yousra DaikhPas encore d'évaluation
- Chiromancie Nouvelle PDFDocument636 pagesChiromancie Nouvelle PDFTamar KalandadzePas encore d'évaluation
- 34 Signes Qui Montrent Qu'il Est AmoureuxDocument22 pages34 Signes Qui Montrent Qu'il Est AmoureuxStephane TatchumPas encore d'évaluation
- Corrige Carnet de Reussite Anglais CAP-2de BP - Ed 2021Document69 pagesCorrige Carnet de Reussite Anglais CAP-2de BP - Ed 2021maloucasPas encore d'évaluation
- D Finition Epreuve Suivi de La Maintenance - PBTCMA-MVTDocument2 pagesD Finition Epreuve Suivi de La Maintenance - PBTCMA-MVTMichelPas encore d'évaluation
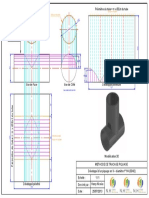
- METHODE - Piquage en VDocument1 pageMETHODE - Piquage en VBouraoui Ben AyedPas encore d'évaluation
- 14/04/2023 Cours de Physiologie Humaine 1 1Document60 pages14/04/2023 Cours de Physiologie Humaine 1 1Mireille KomwaPas encore d'évaluation
- 2-Généralité Sur Les Anémies +anémie FerripriveDocument11 pages2-Généralité Sur Les Anémies +anémie FerripriveMadjidPas encore d'évaluation
- Droit Administratif II Complet 1Document46 pagesDroit Administratif II Complet 1Besher Mousa100% (1)
- Ece 23 PC 41Document5 pagesEce 23 PC 41Charles-Marisa de LasallePas encore d'évaluation
- Active DirectoryDocument39 pagesActive DirectoryNabil karamiPas encore d'évaluation
- Dresser La TableDocument2 pagesDresser La Tablevikutza_123Pas encore d'évaluation
- ACSV v.3Document66 pagesACSV v.3ZONGOPas encore d'évaluation
- Qui Sommes Nous MyBDocument100 pagesQui Sommes Nous MyBSyno WebCamPas encore d'évaluation
- Pages Extraites de BIOLOGIE-Partie-1Document3 pagesPages Extraites de BIOLOGIE-Partie-1mourad1303Pas encore d'évaluation
- Eval Clovis Charlemagne CorrectionDocument2 pagesEval Clovis Charlemagne CorrectionmillasanredPas encore d'évaluation
- Uml VF Addal DriouichDocument48 pagesUml VF Addal DriouichFouzia AddalPas encore d'évaluation
- Dissertation Memoire PDFDocument143 pagesDissertation Memoire PDFSs KgPas encore d'évaluation
- Cours Management de Lentreprise MaryemDocument26 pagesCours Management de Lentreprise MaryemAhlem HajjajiPas encore d'évaluation
- Unite 6Document7 pagesUnite 6Daniela Hardy TabioPas encore d'évaluation
- 9 - Transmission Des Caractères HéréditaireDocument22 pages9 - Transmission Des Caractères HéréditaireAthar SoudaniPas encore d'évaluation
- Corrige Rattrapage Mecanique Des Sols 2019 2020Document7 pagesCorrige Rattrapage Mecanique Des Sols 2019 2020somaya ehPas encore d'évaluation
- Machines ThermiquesDocument106 pagesMachines ThermiquesAlaa Eddine Radh100% (1)
- Etude Du MarcheDocument28 pagesEtude Du MarchebemanPas encore d'évaluation
- Cours SAGE COMPTABILITE 100Document108 pagesCours SAGE COMPTABILITE 100mamadou100% (2)
- CONTES INITIATIQUES PEULS - 1 by ANNEDocument162 pagesCONTES INITIATIQUES PEULS - 1 by ANNEPro Bono88% (8)
- Angles OrientésDocument4 pagesAngles OrientésElfeur NGOLOPas encore d'évaluation