Vous aimerez peut-être aussi
- Network Management System A Complete Guide - 2020 EditionD'EverandNetwork Management System A Complete Guide - 2020 EditionÉvaluation : 5 sur 5 étoiles5/5 (1)
- Processors: by Nipun Sharma ID: 1411981520Document24 pagesProcessors: by Nipun Sharma ID: 1411981520shenbagaraman csePas encore d'évaluation
- Multicore Processor ReportDocument19 pagesMulticore Processor ReportDilesh Kumar100% (1)
- Multicore ProcessorDocument23 pagesMulticore Processor18E3436 Anjali naik100% (1)
- Blu Ray Technology Seminar ReportDocument34 pagesBlu Ray Technology Seminar ReportSaiVamsiPas encore d'évaluation
- AMD 64 BIOS and Kenrel Dev's GuideDocument434 pagesAMD 64 BIOS and Kenrel Dev's GuidePhilip KentPas encore d'évaluation
- Dual Core Vs Core 2 DuoDocument5 pagesDual Core Vs Core 2 DuogermainjulesPas encore d'évaluation
- Risc Vs CiscDocument24 pagesRisc Vs CiscRaj KumarPas encore d'évaluation
- 80486Document21 pages80486Khadar Nawas0% (1)
- EC6703 Embedded and Real Time SystemsDocument168 pagesEC6703 Embedded and Real Time Systemsramkumar100% (1)
- I7 ReportDocument20 pagesI7 ReportSethu ESPas encore d'évaluation
- Module-5 ACA PDFDocument30 pagesModule-5 ACA PDFTanay Balraj100% (1)
- Selecting Criteria of A MotherboardDocument3 pagesSelecting Criteria of A MotherboardDa NishPas encore d'évaluation
- Microprocessor Core 2 DuoDocument22 pagesMicroprocessor Core 2 DuoGowtham Kodavati100% (1)
- Seminar ReportDocument28 pagesSeminar Reportapi-3755562100% (3)
- Comparison of Data Encryption AlgorithmsDocument3 pagesComparison of Data Encryption Algorithmskartikrathod10Pas encore d'évaluation
- ACA Unit 8 - 1Document23 pagesACA Unit 8 - 1sushil@irdPas encore d'évaluation
- Itanium Processor Seminar ReportDocument30 pagesItanium Processor Seminar ReportSufail APas encore d'évaluation
- CHMA Unit - VDocument25 pagesCHMA Unit - VSayyan Shaikh100% (1)
- FINALGrid Computing Seminar ReportDocument34 pagesFINALGrid Computing Seminar ReportMiraj Kumar100% (3)
- Harvard ArchitectureDocument3 pagesHarvard Architecturebalu4allPas encore d'évaluation
- Written by Nicolas Ballas: How Computer Processors WorkDocument5 pagesWritten by Nicolas Ballas: How Computer Processors Workace150100% (1)
- 2... Vijay-Advanced Security Systems in Jewellery Shops and Banks PDFDocument97 pages2... Vijay-Advanced Security Systems in Jewellery Shops and Banks PDFShanker PandeyPas encore d'évaluation
- Lecture1 - Introduction To Embbeded System DesignDocument29 pagesLecture1 - Introduction To Embbeded System DesignĐức Anh CPas encore d'évaluation
- POP Using C Module 1 NotesDocument55 pagesPOP Using C Module 1 Notesnidhidgowda185Pas encore d'évaluation
- 21CS43 Module 5 Microcontroller and Embedded Systems Prof VANARASANDocument41 pages21CS43 Module 5 Microcontroller and Embedded Systems Prof VANARASANNikhil chandPas encore d'évaluation
- Digital Camera CasestudyDocument57 pagesDigital Camera CasestudyAnonymous aLRiBR100% (1)
- Connecting To ThingSpeakDocument36 pagesConnecting To ThingSpeakDouglas CruzPas encore d'évaluation
- 3 - Disk Performance ParameterDocument5 pages3 - Disk Performance Parametersaurabmi2Pas encore d'évaluation
- Module 1 Introduction - DBMSDocument43 pagesModule 1 Introduction - DBMSSwathi GudivadaPas encore d'évaluation
- Unit 1 Introduction To Embedded System Design PDFDocument99 pagesUnit 1 Introduction To Embedded System Design PDFNIDHI. R .SINGH100% (1)
- Taxonomy of Parallel Computing ParadigmsDocument9 pagesTaxonomy of Parallel Computing ParadigmssushmaPas encore d'évaluation
- Types of MicrocontrollersDocument7 pagesTypes of MicrocontrollersItronix MohaliPas encore d'évaluation
- OpenPLC - An Opensource Alternative For AutomationDocument5 pagesOpenPLC - An Opensource Alternative For AutomationThiago Alves100% (1)
- Crusoe ProcessorDocument28 pagesCrusoe Processorvichu0481Pas encore d'évaluation
- CS 8491 Computer ArchitectureDocument103 pagesCS 8491 Computer ArchitectureMUKESH KUMAR P 2019-2023 CSEPas encore d'évaluation
- Csc4306 Net-Centric ComputingDocument5 pagesCsc4306 Net-Centric ComputingAli musa baffa100% (1)
- Holographic Data Storage System Seminar ReportDocument27 pagesHolographic Data Storage System Seminar Reportankyt807Pas encore d'évaluation
- Government Polytechnic College Nedumangadu: Snapdragon ProcessorsDocument17 pagesGovernment Polytechnic College Nedumangadu: Snapdragon ProcessorspremamohanPas encore d'évaluation
- Infini BandDocument22 pagesInfini Bandtarunr1Pas encore d'évaluation
- Emb Lab Manual FinalDocument142 pagesEmb Lab Manual FinalSatheesh Kumar100% (1)
- Introduction To Embedded SystemsDocument50 pagesIntroduction To Embedded SystemsAmbika NaikPas encore d'évaluation
- Modes of Encryption and DecryptionDocument26 pagesModes of Encryption and DecryptionFatima SyedPas encore d'évaluation
- An Area Efficient Universal Cryptography Processor For Smart CardsDocument87 pagesAn Area Efficient Universal Cryptography Processor For Smart Cardsnagaharika25930% (1)
- Fundamentals in Digital IC DesignDocument16 pagesFundamentals in Digital IC DesignSiddharth PanditPas encore d'évaluation
- Pentium Memory Hierarchy (By Indranil Nandy, IIT KGP)Document6 pagesPentium Memory Hierarchy (By Indranil Nandy, IIT KGP)Indranil Nandy100% (5)
- Reduced Instruction Set Computer 1 PDFDocument6 pagesReduced Instruction Set Computer 1 PDFKunal PawarPas encore d'évaluation
- Smart Memories A Seminar Report: A.Rana Pratap (14761A0506)Document15 pagesSmart Memories A Seminar Report: A.Rana Pratap (14761A0506)Hari KrishPas encore d'évaluation
- Motherboard and Its Component (11813705)Document10 pagesMotherboard and Its Component (11813705)DeePäk YädävPas encore d'évaluation
- Lecture 0: Cpus and Gpus: Prof. Mike GilesDocument36 pagesLecture 0: Cpus and Gpus: Prof. Mike GilesAashishPas encore d'évaluation
- Interprocess CommunicationDocument16 pagesInterprocess CommunicationVinuthna ReddyPas encore d'évaluation
- How To Network Five Arduinos (Or More) Using I2C - TechBitarDocument6 pagesHow To Network Five Arduinos (Or More) Using I2C - TechBitarSigid AriewibowoPas encore d'évaluation
- Multi Sensor Write Up PaperDocument7 pagesMulti Sensor Write Up PaperTRIAD TECHNO SERVICESPas encore d'évaluation
- GSM Based Automatic Irrigation System Using 8051 MicrocontrollerDocument6 pagesGSM Based Automatic Irrigation System Using 8051 Microcontrolleramism24100% (1)
- Bandwidth RecyclingDocument10 pagesBandwidth RecyclingParvathi GoudPas encore d'évaluation
- P11Mca1 & P8Mca1 - Advanced Computer Architecture: Unit V Processors and Memory HierarchyDocument45 pagesP11Mca1 & P8Mca1 - Advanced Computer Architecture: Unit V Processors and Memory HierarchyMohanty AyodhyaPas encore d'évaluation
- Superscalar ArchitectureDocument9 pagesSuperscalar Architectureenggeng7Pas encore d'évaluation
- Parallel ProcessingDocument31 pagesParallel ProcessingSantosh SinghPas encore d'évaluation
- A Computer Integrated Framework For E-Learning Control Systems Based On Data Flow DiagramsDocument9 pagesA Computer Integrated Framework For E-Learning Control Systems Based On Data Flow Diagramsperky_ashishPas encore d'évaluation
- Wet Scrubber: Pollutants Furnace Flue GasDocument12 pagesWet Scrubber: Pollutants Furnace Flue Gasperky_ashishPas encore d'évaluation
- Cell Phone Technology - Safety Power PointDocument36 pagesCell Phone Technology - Safety Power Pointperky_ashishPas encore d'évaluation
- Transducer, Which Acting A Secondly Transducer Gives An Output That Is Electric in Nature. TheDocument4 pagesTransducer, Which Acting A Secondly Transducer Gives An Output That Is Electric in Nature. Theperky_ashishPas encore d'évaluation
- Topology ClassificationDocument8 pagesTopology ClassificationRosalie FermantePas encore d'évaluation
- PuttyDocument159 pagesPuttyAgus TriPas encore d'évaluation
- StormMQ WhitePaper - A Comparison of AMQP and MQTTDocument6 pagesStormMQ WhitePaper - A Comparison of AMQP and MQTTMarko MestrovicPas encore d'évaluation
- 2 HTML FormsDocument43 pages2 HTML FormsAtul GargPas encore d'évaluation
- Array Java ExerciseDocument5 pagesArray Java ExerciseRiskyana Dewi Intan PPas encore d'évaluation
- Next Generation FirewallDocument6 pagesNext Generation FirewallFelippe CoelhoPas encore d'évaluation
- Dcs Emulation SoftwareDocument17 pagesDcs Emulation SoftwareAhmed KhairiPas encore d'évaluation
- OpenVPN Configuration Step by Step - MikroTik WikiDocument35 pagesOpenVPN Configuration Step by Step - MikroTik WikibarmilliPas encore d'évaluation
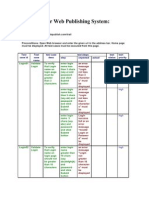
- Web Publishing Test CasesDocument3 pagesWeb Publishing Test CasesJafar BhattiPas encore d'évaluation
- Evaluate Neural Network For Vehicle Routing ProblemDocument3 pagesEvaluate Neural Network For Vehicle Routing ProblemIDESPas encore d'évaluation
- Mech Hyper ThreadingDocument16 pagesMech Hyper ThreadingDilpreet SinghPas encore d'évaluation
- YLP SAS Advanced Certification SlidesDocument114 pagesYLP SAS Advanced Certification Slidesnare9990% (3)
- Gnuplot JaDocument17 pagesGnuplot JaSantiago Vidal garciaPas encore d'évaluation
- Classes and ObjectsDocument18 pagesClasses and ObjectsUday Vir SinghPas encore d'évaluation
- Virtual Network AzureDocument566 pagesVirtual Network AzureRajiv Mural100% (1)
- Project 1 Creating A Dynamic Web Page: Header - PHP Footer - PHPDocument4 pagesProject 1 Creating A Dynamic Web Page: Header - PHP Footer - PHPIvan PangitPas encore d'évaluation
- Multimedia Authoring SystemDocument56 pagesMultimedia Authoring Systemtuskichau0% (1)
- Create Database VentasDocument11 pagesCreate Database VentasAnonymous BwTccxPas encore d'évaluation
- Confignotes AEDocument21 pagesConfignotes AEJulio PaucarPas encore d'évaluation
- Experiment 2 Creating, Compiling and Executing C/C++ Programs Using GCC/G++ CompilersDocument3 pagesExperiment 2 Creating, Compiling and Executing C/C++ Programs Using GCC/G++ CompilersMuddassir AhmedPas encore d'évaluation
- NShield Microsoft ADCS and OCSP Windows Server 2012 IgDocument28 pagesNShield Microsoft ADCS and OCSP Windows Server 2012 IgJustin RobinsonPas encore d'évaluation
- Cufft Performance GraphsDocument10 pagesCufft Performance Graphsapi-12797690Pas encore d'évaluation
- Rman SetupDocument4 pagesRman SetupSaeed MeethalPas encore d'évaluation
- Biometric Security ConcernsDocument27 pagesBiometric Security ConcernsprinceuchenduPas encore d'évaluation
- Holo MagiskDocument1 pageHolo MagiskSeptarian Dwi CahyoPas encore d'évaluation
- AMCA Individual Assignment-Book4SportDocument30 pagesAMCA Individual Assignment-Book4SportTiong Jiang ChuaPas encore d'évaluation
- Tutorial 2 - Creating A Business Logic LayerDocument14 pagesTutorial 2 - Creating A Business Logic Layersan000jayPas encore d'évaluation
- Adding A Scheduling Policy To The Linux KernelDocument34 pagesAdding A Scheduling Policy To The Linux KernelCathy JinPas encore d'évaluation
- Datastage ScenariosDocument34 pagesDatastage ScenariosNaresh Kumar100% (1)
- School Management System NeewDocument24 pagesSchool Management System NeewMudassar Nawaz55% (22)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsD'EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsÉvaluation : 5 sur 5 étoiles5/5 (5)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsD'EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongPas encore d'évaluation
- CISSP All-in-One Exam Guide, Ninth EditionD'EverandCISSP All-in-One Exam Guide, Ninth EditionÉvaluation : 5 sur 5 étoiles5/5 (1)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]D'EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Évaluation : 5 sur 5 étoiles5/5 (5)
- Digital Transformation: An Executive Guide to Survive and Thrive in the New EconomyD'EverandDigital Transformation: An Executive Guide to Survive and Thrive in the New EconomyÉvaluation : 5 sur 5 étoiles5/5 (1)
- Arduino and Raspberry Pi Sensor Projects for the Evil GeniusD'EverandArduino and Raspberry Pi Sensor Projects for the Evil GeniusPas encore d'évaluation
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102D'EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Évaluation : 5 sur 5 étoiles5/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyD'EverandChip War: The Fight for the World's Most Critical TechnologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (82)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyD'EverandChip War: The Quest to Dominate the World's Most Critical TechnologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (230)
- Raspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideD'EverandRaspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuidePas encore d'évaluation
- How To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsD'EverandHow To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsPas encore d'évaluation
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)D'EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Évaluation : 5 sur 5 étoiles5/5 (2)
- The comprehensive guide to build Raspberry Pi 5 RoboticsD'EverandThe comprehensive guide to build Raspberry Pi 5 RoboticsPas encore d'évaluation
- Computer Science: A Concise IntroductionD'EverandComputer Science: A Concise IntroductionÉvaluation : 4.5 sur 5 étoiles4.5/5 (14)
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsD'EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsPas encore d'évaluation
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002D'EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Évaluation : 5 sur 5 étoiles5/5 (1)
- CompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102D'EverandCompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Pas encore d'évaluation
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XD'EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XÉvaluation : 3 sur 5 étoiles3/5 (2)
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsD'EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsÉvaluation : 4.5 sur 5 étoiles4.5/5 (49)
- iPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneD'EverandiPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhonePas encore d'évaluation
- Debugging Embedded and Real-Time Systems: The Art, Science, Technology, and Tools of Real-Time System DebuggingD'EverandDebugging Embedded and Real-Time Systems: The Art, Science, Technology, and Tools of Real-Time System DebuggingÉvaluation : 5 sur 5 étoiles5/5 (1)
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionD'EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionÉvaluation : 5 sur 5 étoiles5/5 (2)
- Samsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneD'EverandSamsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhonePas encore d'évaluation