Vous aimerez peut-être aussi
- Robotica MecanismosDocument7 pagesRobotica MecanismosMarcl Andrs SampdroPas encore d'évaluation
- Abb RobotDocument24 pagesAbb RobotGuillermo Ramos TellezPas encore d'évaluation
- Matriz de TransformaciónDocument8 pagesMatriz de TransformaciónpactroPas encore d'évaluation
- Control de Trayectoria de Manipulador Robótico de 4 GDLDocument11 pagesControl de Trayectoria de Manipulador Robótico de 4 GDLjecamarenaq100% (1)
- TRAYECTORIASDocument23 pagesTRAYECTORIASCarlos VazquezPas encore d'évaluation
- 2PC - Tensión Con Deformmacion Termica - Usando Ansys 18.2 (16.6.20)Document22 pages2PC - Tensión Con Deformmacion Termica - Usando Ansys 18.2 (16.6.20)Carlos Capuñay NuñezPas encore d'évaluation
- Seguidor de Linea BasicoDocument10 pagesSeguidor de Linea BasicoRaul CadetePas encore d'évaluation
- Practica#7Document10 pagesPractica#7Alexiz CuPas encore d'évaluation
- Toolbox MatlabDocument8 pagesToolbox MatlabSergio SorucoPas encore d'évaluation
- Lab Nº2 - Matrices de Rotación - 2015-I PDFDocument4 pagesLab Nº2 - Matrices de Rotación - 2015-I PDFAndree Gutierrez SucllaPas encore d'évaluation
- Toolbox Robotica en MatlabDocument35 pagesToolbox Robotica en MatlabWilliams Ayala100% (1)
- Cinematica InversaDocument27 pagesCinematica InversaHector GuerreroPas encore d'évaluation
- Proyecto CatapultaDocument5 pagesProyecto CatapultaJhorman Gustavo Maldonado Villamizar0% (1)
- 7.cinemática Diferencial Directa de Robots IndustrialesDocument35 pages7.cinemática Diferencial Directa de Robots IndustrialesLeandro OrellanaPas encore d'évaluation
- Informacion Abb Irb 140Document11 pagesInformacion Abb Irb 140Lonmar L. Lentch LopezPas encore d'évaluation
- Diseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarDocument12 pagesDiseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarMichael Rimachi100% (2)
- Matrices de Transformacion Homogenea PDFDocument47 pagesMatrices de Transformacion Homogenea PDFraulPas encore d'évaluation
- MatrizJacobiana 2020Document46 pagesMatrizJacobiana 2020drake JonasPas encore d'évaluation
- Robótica IndustrialDocument7 pagesRobótica Industrialcamilin1993Pas encore d'évaluation
- Cinematica Directa e Inversa-2009Document64 pagesCinematica Directa e Inversa-2009Betoys58580100% (1)
- Matrices de Transformación HomogéneaDocument17 pagesMatrices de Transformación HomogéneaJhonatan Kevin OrozaPas encore d'évaluation
- T5 CINEMATICA OCW - Ejercicios Resueltos RevisionDocument15 pagesT5 CINEMATICA OCW - Ejercicios Resueltos RevisionGerardo XPas encore d'évaluation
- Ángulos de EulerDocument11 pagesÁngulos de EulerGerman RodriguezPas encore d'évaluation
- Avancelab 7Document4 pagesAvancelab 7dfgdfghb bfghdthdhPas encore d'évaluation
- Proyecto - Robot AbbDocument25 pagesProyecto - Robot AbbmiguelthorPas encore d'évaluation
- Algoritmo de Denavit-HartenbergDocument8 pagesAlgoritmo de Denavit-Hartenberghugoadrian quispebolivarPas encore d'évaluation
- Tranformada ZDocument12 pagesTranformada ZNabile RodriguezPas encore d'évaluation
- PDF Matlab Rotar y Trasladar Funciones 2d y 3d Version Mejorada DLDocument52 pagesPDF Matlab Rotar y Trasladar Funciones 2d y 3d Version Mejorada DLdokuPas encore d'évaluation
- InformeFinal ROBOT3GDL SCARADocument56 pagesInformeFinal ROBOT3GDL SCARAJosé PazPas encore d'évaluation
- Ejemplo Manual de InstalaciónDocument24 pagesEjemplo Manual de InstalaciónAbelardo Willibaldo Ramírez GarcíaPas encore d'évaluation
- Proyecto Ascensor..Jaramillo Monteros Narvaez UlcuangoDocument18 pagesProyecto Ascensor..Jaramillo Monteros Narvaez Ulcuangoriky1309Pas encore d'évaluation
- CRM Clase2Document54 pagesCRM Clase2Lalo Sucasaca PampaPas encore d'évaluation
- Herramientas para La Localizacion Espacial. MatlabDocument8 pagesHerramientas para La Localizacion Espacial. MatlabEfren EspinozaPas encore d'évaluation
- Limitaciones MecanicasDocument58 pagesLimitaciones MecanicasDdrr KarloOzz50% (2)
- Practica4 - ROBOTICAS MATLABDocument15 pagesPractica4 - ROBOTICAS MATLABferocilloPas encore d'évaluation
- Lab01-Entorno de Desarrollo AppInventorDocument23 pagesLab01-Entorno de Desarrollo AppInventorDario Gabriel Gomez VillanuevaPas encore d'évaluation
- Modelo Cinematico de Robot CRS A255 PDFDocument7 pagesModelo Cinematico de Robot CRS A255 PDFCheco TorresPas encore d'évaluation
- Manipulación Del Brazo RobóticoDocument6 pagesManipulación Del Brazo RobóticoRicardoPas encore d'évaluation
- Laboratorio 7 Brazo Robótico Arduino Robótica UPNDocument8 pagesLaboratorio 7 Brazo Robótico Arduino Robótica UPNPrimus 2018Pas encore d'évaluation
- Pick and Place + Faja RoboDKDocument6 pagesPick and Place + Faja RoboDKYOSSEF ROJAS TAPARAPas encore d'évaluation
- 5.-Presentacion-Aplicaciones Del Jacobiano PDFDocument32 pages5.-Presentacion-Aplicaciones Del Jacobiano PDFAnaliz S. Acosta AlvinoPas encore d'évaluation
- Mecanismo de Retorno RapidoDocument5 pagesMecanismo de Retorno RapidobreinerPas encore d'évaluation
- Matrices de Transformación HomogéneaDocument5 pagesMatrices de Transformación HomogéneaadolfoclesPas encore d'évaluation
- Servomotor TutorialDocument9 pagesServomotor TutorialDaries DctPas encore d'évaluation
- Analisis de Un Robot Manipulador Scara ARTICULODocument22 pagesAnalisis de Un Robot Manipulador Scara ARTICULOcarlos.otiniano9811Pas encore d'évaluation
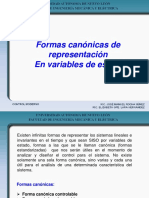
- 03-Formas Canonicas de RVEDocument58 pages03-Formas Canonicas de RVEctagmPas encore d'évaluation
- Cinematica Del RobotDocument28 pagesCinematica Del Robotdrake JonasPas encore d'évaluation
- Parametros Denavit y HartenbergDocument41 pagesParametros Denavit y HartenbergJoglupePas encore d'évaluation
- Laboratorio 3 Servomotores Robótica UPNDocument5 pagesLaboratorio 3 Servomotores Robótica UPNPrimus 2018Pas encore d'évaluation
- Multi SimDocument2 pagesMulti SimalexPas encore d'évaluation
- Algoritmo Matlab de Un Sistema de PendulosDocument14 pagesAlgoritmo Matlab de Un Sistema de PendulosFIDEL TOMAS MONTEZA ZEVALLOS100% (4)
- Cinematica y Dinamica Del RobotDocument17 pagesCinematica y Dinamica Del RobotLuis Hoyos BautistaPas encore d'évaluation
- 2 Tutorial Programación Labview PDFDocument83 pages2 Tutorial Programación Labview PDFAngel Eduardo Cruzado NuñezPas encore d'évaluation
- Robot Seguidor de LineaDocument4 pagesRobot Seguidor de Lineacheco66666Pas encore d'évaluation
- Aplicación de Cinemática DirectaDocument12 pagesAplicación de Cinemática DirectaEduardo ArriagaPas encore d'évaluation
- Informe 5 - Arias Vargas Karen Rivera Duenas Jose y Zevallos Zegarra RocioDocument28 pagesInforme 5 - Arias Vargas Karen Rivera Duenas Jose y Zevallos Zegarra RocioJose OlazabalPas encore d'évaluation
- TareaN1 SistemasBiologicos RoboticaBioInspiradaDocument9 pagesTareaN1 SistemasBiologicos RoboticaBioInspiradaAland BravoPas encore d'évaluation
- TareaN4 RoboticaAplicadaDocument7 pagesTareaN4 RoboticaAplicadaAland BravoPas encore d'évaluation
- 02 Cinemática Directa e Inversa.Document10 pages02 Cinemática Directa e Inversa.sistemaelectricoPas encore d'évaluation
- Informe de Laboratorio 6 - Estatica Del RobotDocument33 pagesInforme de Laboratorio 6 - Estatica Del RobotLucho Alex Juarez MechePas encore d'évaluation
- Capitulo 12Document7 pagesCapitulo 12Lucho Alex Juarez MechePas encore d'évaluation
- Composición de CuaterniosDocument33 pagesComposición de CuaterniosLucho Alex Juarez MechePas encore d'évaluation
- Modelo Cinematico BCN3DDocument14 pagesModelo Cinematico BCN3DLucho Alex Juarez MechePas encore d'évaluation
- Flujograma de Conciliacion BancariaDocument8 pagesFlujograma de Conciliacion BancariaEwars MenesesPas encore d'évaluation
- Herramientas OfimaticasDocument5 pagesHerramientas OfimaticasmarlenyPas encore d'évaluation
- Diana S Rabinovich 1991 Sexualidad y Sig PDFDocument95 pagesDiana S Rabinovich 1991 Sexualidad y Sig PDFCarlos Lopez de ArcePas encore d'évaluation
- Consultas Vuelta Ciclista (Soluciones)Document12 pagesConsultas Vuelta Ciclista (Soluciones)Victor Chospa El Siete Boxeador100% (1)
- Examen Parcial I Probabilidad y EstadisticasDocument2 pagesExamen Parcial I Probabilidad y Estadisticassaint_mike030% (1)
- Instalacion App NOX V 5.0Document21 pagesInstalacion App NOX V 5.0Adriana MendocillaPas encore d'évaluation
- Chipset JuntosDocument134 pagesChipset JuntosFanny LopezPas encore d'évaluation
- Definiciones Básicas y TerminologíaDocument3 pagesDefiniciones Básicas y TerminologíaGustavo LinoPas encore d'évaluation
- Cap I - Introduccion A La CriptografiaDocument43 pagesCap I - Introduccion A La CriptografiaNormita PiedadPas encore d'évaluation
- Preguntas 03proceso PressmanDocument2 pagesPreguntas 03proceso PressmanAlexandra BarretoPas encore d'évaluation
- Industria 4.0Document12 pagesIndustria 4.0nando123abc100% (2)
- Cómo Eliminar Un Virus TroyanoDocument39 pagesCómo Eliminar Un Virus TroyanoMigeny LarssonPas encore d'évaluation
- Apunte Dist Binomial Inferencia EstadisticaDocument5 pagesApunte Dist Binomial Inferencia EstadisticaMiguel Gonzzali33% (3)
- Integracion Cobit Coso Iso27001 Itil y MageritDocument8 pagesIntegracion Cobit Coso Iso27001 Itil y MageritPablo AndrésPas encore d'évaluation
- Como Minar BitcoinsDocument4 pagesComo Minar BitcoinsWilliam Garcia Bedoya100% (1)
- Programacion de Operaciones en Procesos en Linea Métodos de AgotamientoDocument9 pagesProgramacion de Operaciones en Procesos en Linea Métodos de AgotamientoCarlos QuirozPas encore d'évaluation
- Convertidores A DDocument2 pagesConvertidores A DantonPas encore d'évaluation
- 11-02-2019 111023 Am MODULO II SISTEMA DE ECUACIONES LINEALESDocument5 pages11-02-2019 111023 Am MODULO II SISTEMA DE ECUACIONES LINEALESEdinsson García MadridPas encore d'évaluation
- Cómo Actualizar Mapas Del GPS Garmin Con BaseCampDocument2 pagesCómo Actualizar Mapas Del GPS Garmin Con BaseCampomarsovPas encore d'évaluation
- Historia de Los Números ComplejosDocument11 pagesHistoria de Los Números ComplejosAntonioPas encore d'évaluation
- Muestreo de AceptaciónDocument15 pagesMuestreo de AceptaciónLuis Rodrigo Pupiales0% (1)
- Mainboard Intel Dh61beDocument5 pagesMainboard Intel Dh61bedmike_4Pas encore d'évaluation
- Presentacion - SubconsultasDocument32 pagesPresentacion - SubconsultasBasto Olaya Carlos AlfonsoPas encore d'évaluation
- Certificado Matricula STM, VcioDocument2 pagesCertificado Matricula STM, VcioJUAN D BARRERAPas encore d'évaluation
- PRATICA3Document184 pagesPRATICA3Faby CastilloPas encore d'évaluation
- MGA Vive Digital MamatocoDocument20 pagesMGA Vive Digital MamatocoRafael Andres Alfaro RamosPas encore d'évaluation
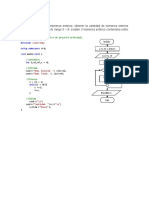
- Practica Estructura MIENTRAS ResueltaDocument12 pagesPractica Estructura MIENTRAS ResueltaAnonymous ReUt4WnPas encore d'évaluation
- Guía de Ejercicios de Práctica I ParcialDocument8 pagesGuía de Ejercicios de Práctica I ParcialCeleo EscoberPas encore d'évaluation
- Comic Probabilidad 3Document104 pagesComic Probabilidad 3huverferiaPas encore d'évaluation
- Práctica 4. Sistemas Digitales IDocument7 pagesPráctica 4. Sistemas Digitales IBryan BravooPas encore d'évaluation