Vous aimerez peut-être aussi
- Smart Cities and Homes: Key Enabling TechnologiesD'EverandSmart Cities and Homes: Key Enabling TechnologiesÉvaluation : 5 sur 5 étoiles5/5 (1)
- Bus Safety ReportDocument54 pagesBus Safety ReportS RAVIPas encore d'évaluation
- Blockchain for Smart CitiesD'EverandBlockchain for Smart CitiesSaravanan KrishnanPas encore d'évaluation
- Thiru Seven Hills Polytechnic CollegeDocument5 pagesThiru Seven Hills Polytechnic CollegeDhurgaadevi SanthanamPas encore d'évaluation
- Technical Seminar MergedDocument45 pagesTechnical Seminar Merged20B81A1235cvr.ac.in G RUSHI BHARGAVPas encore d'évaluation
- Jabalpur Engineering College, Jabalpur (M.P.) : Automation of Level Crossing Using RfidDocument20 pagesJabalpur Engineering College, Jabalpur (M.P.) : Automation of Level Crossing Using RfidHarshit GahelotPas encore d'évaluation
- Report 04Document53 pagesReport 04mallasujith02Pas encore d'évaluation
- Report HasnainDocument42 pagesReport HasnainHasnain AhammedPas encore d'évaluation
- Street LampDocument63 pagesStreet LampI NoPas encore d'évaluation
- Eb BillDocument104 pagesEb BillI NoPas encore d'évaluation
- PROJECTDocument27 pagesPROJECTemmanuelpi007Pas encore d'évaluation
- An Atm With An Eye (Final)Document21 pagesAn Atm With An Eye (Final)sai praneeth100% (1)
- Visvesvaraya Technological University, Belgaum: Technical Seminar Report OnDocument18 pagesVisvesvaraya Technological University, Belgaum: Technical Seminar Report OnShyam RajPas encore d'évaluation
- Aamer Report SeminarDocument27 pagesAamer Report SeminarRohith NarayanPas encore d'évaluation
- SOI Report ArijitfinalDocument6 pagesSOI Report Arijitfinalkumarsuraj8917200168Pas encore d'évaluation
- Internship Report 111Document35 pagesInternship Report 111Vaishnavi DalavePas encore d'évaluation
- Unauthorised Access Intimation Using GSM: Electronics & Communication EngineeringDocument9 pagesUnauthorised Access Intimation Using GSM: Electronics & Communication Engineeringsuyash mishraPas encore d'évaluation
- Project ReviewDocument59 pagesProject Reviewvamshi AkaramPas encore d'évaluation
- Technical ReportDocument21 pagesTechnical Reportneeraj kumarPas encore d'évaluation
- SEMINAR REPT Final11Document23 pagesSEMINAR REPT Final11SUMITH K SPas encore d'évaluation
- Project Report FinalDocument53 pagesProject Report FinalngpgopiPas encore d'évaluation
- Unauthorised Access Intimation Using GSM: Electronics & Communication EngineeringDocument9 pagesUnauthorised Access Intimation Using GSM: Electronics & Communication Engineeringsuyash mishraPas encore d'évaluation
- License Detection Using QrcodeDocument56 pagesLicense Detection Using QrcodeSuchi UshaPas encore d'évaluation
- "System On Chip: Design and Revolution": Technical SeminarDocument5 pages"System On Chip: Design and Revolution": Technical SeminarSyed MisbahPas encore d'évaluation
- Vehicle To Vehicle Communication Using RF & Ir TechnologyDocument51 pagesVehicle To Vehicle Communication Using RF & Ir TechnologyClassic PrintersPas encore d'évaluation
- Final Report PDFDocument35 pagesFinal Report PDFSUNIL KUMARPas encore d'évaluation
- Workshop BrochureDocument2 pagesWorkshop BrochureSreenivasulu UmmadisettyPas encore d'évaluation
- Jimma ThesisDocument65 pagesJimma ThesisMintesnot AlemuPas encore d'évaluation
- Adaptive Vehicle System (AVS)Document86 pagesAdaptive Vehicle System (AVS)TeamFYPPas encore d'évaluation
- Mini ProjectDocument25 pagesMini ProjectmrthumulamediaPas encore d'évaluation
- Report On Fingerprint TechnologyDocument16 pagesReport On Fingerprint Technologyafnansayeed.ece2020.ncPas encore d'évaluation
- Supritha ResumeDocument4 pagesSupritha ResumeRaghunandan BhogaiahPas encore d'évaluation
- PLC and ScadaDocument60 pagesPLC and ScadaTejeshwini100% (1)
- Internship - Report Guru PratheekDocument25 pagesInternship - Report Guru PratheekSanitha MichailPas encore d'évaluation
- Original Project WorkDocument65 pagesOriginal Project WorkKonda PrashanthPas encore d'évaluation
- Techinical Seminar 1Document8 pagesTechinical Seminar 120B81A1235cvr.ac.in G RUSHI BHARGAVPas encore d'évaluation
- Online Vehicle Rental System Named As ABAV: Maulana Abul Kalam Azad University of TechnologyDocument29 pagesOnline Vehicle Rental System Named As ABAV: Maulana Abul Kalam Azad University of TechnologyANOY BISWASPas encore d'évaluation
- Biometric AtmDocument5 pagesBiometric AtmsaRAth asgaRdianPas encore d'évaluation
- IPL ReportDocument31 pagesIPL Reportani concertPas encore d'évaluation
- CAE Broucher Editted To PrintDocument4 pagesCAE Broucher Editted To PrintmeetbalakumarPas encore d'évaluation
- Automated Railway Announcement Using Zigbee ProtocolDocument18 pagesAutomated Railway Announcement Using Zigbee Protocolsree2728Pas encore d'évaluation
- Final ReportDocument51 pagesFinal ReportGOWTHAM KPas encore d'évaluation
- Deep Space Optical Terminals: Bachelor of Engineering in Electronics and Communication EngineeringDocument20 pagesDeep Space Optical Terminals: Bachelor of Engineering in Electronics and Communication EngineeringParu RJPas encore d'évaluation
- Internship ReportDocument31 pagesInternship Reportraki082mPas encore d'évaluation
- DPV ProjectDocument65 pagesDPV Projectvamshi AkaramPas encore d'évaluation
- Six Months Industrial Training ReportDocument31 pagesSix Months Industrial Training ReportKhPas encore d'évaluation
- Complete DocumentDocument57 pagesComplete DocumentDeepak StallionePas encore d'évaluation
- Bachelor of Technology: Electrical and Electronics EngineeringDocument52 pagesBachelor of Technology: Electrical and Electronics EngineeringMehar SinghPas encore d'évaluation
- Visvesvaraya Technological UniversityDocument5 pagesVisvesvaraya Technological UniversitychaitanyaPas encore d'évaluation
- Final Project Report-Arun.ADocument62 pagesFinal Project Report-Arun.APriya DharshiniPas encore d'évaluation
- Edge ComputingDocument5 pagesEdge ComputingAbhishek nPas encore d'évaluation
- Child Tracking Project ReportDocument54 pagesChild Tracking Project ReportManish Kumar Sahani100% (2)
- 2automatic Vehicle Accident Detection Project Docx Google DocsDocument45 pages2automatic Vehicle Accident Detection Project Docx Google Docsdani bashengeziPas encore d'évaluation
- Under The Guidance Of: Submitted byDocument14 pagesUnder The Guidance Of: Submitted byMak AjaiPas encore d'évaluation
- Voice Operated LiftDocument38 pagesVoice Operated LiftROYAL WARRIOR0% (1)
- THIRD EYE - An Aid For Blind To ReadDocument67 pagesTHIRD EYE - An Aid For Blind To ReadKali LinuxPas encore d'évaluation
- Nitish Kumar: Internship Summary ReportDocument31 pagesNitish Kumar: Internship Summary ReportManish kumarPas encore d'évaluation
- Atm Security Using Eye and Face Recognition System: A Seminar Report Submitted ToDocument6 pagesAtm Security Using Eye and Face Recognition System: A Seminar Report Submitted TopavankumarPas encore d'évaluation
- Visvesvaraya Technological University: "Jnana Sangama", Belagavi-590018, KarnatakaDocument21 pagesVisvesvaraya Technological University: "Jnana Sangama", Belagavi-590018, KarnatakaPrajwal GowdaPas encore d'évaluation
- Aicte (MHRD) - Staff Development Programme: Dr. Vinay Kumar Srivastava Mr. Asim MukherjeeDocument6 pagesAicte (MHRD) - Staff Development Programme: Dr. Vinay Kumar Srivastava Mr. Asim Mukherjeeb_raj1975Pas encore d'évaluation
- Introduction To Asics: Application-Specific Integrated CircuitsDocument21 pagesIntroduction To Asics: Application-Specific Integrated CircuitsRameshkumar JayaramanPas encore d'évaluation
- Convolution Matrices For Signal Processing Applications in MATLABDocument9 pagesConvolution Matrices For Signal Processing Applications in MATLABCode-XPas encore d'évaluation
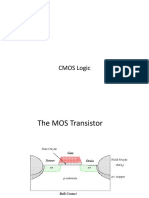
- CMOS LogicDocument35 pagesCMOS LogicS RAVIPas encore d'évaluation
- Asic Library DesignDocument12 pagesAsic Library DesignS RAVIPas encore d'évaluation
- Unit 4Document1 pageUnit 4S RAVIPas encore d'évaluation
- 2 Bridge Course (2015-16)Document6 pages2 Bridge Course (2015-16)S RAVIPas encore d'évaluation
- Verilog HDLDocument48 pagesVerilog HDLS RAVIPas encore d'évaluation
- Welcome To The M Notebook For Word!: AtlabDocument3 pagesWelcome To The M Notebook For Word!: AtlabDEEPAK KUMAR MALLICKPas encore d'évaluation
- Unit - Ii System Bus Structure: Course Material (Question Bank)Document8 pagesUnit - Ii System Bus Structure: Course Material (Question Bank)Haritha HariPas encore d'évaluation
- Unit-I 16 Marks - Rejinpaul PDFDocument115 pagesUnit-I 16 Marks - Rejinpaul PDFS RAVIPas encore d'évaluation
- Unit-I 16 Marks - Rejinpaul PDFDocument115 pagesUnit-I 16 Marks - Rejinpaul PDFS RAVIPas encore d'évaluation
- Help Search ExclusionsDocument1 pageHelp Search ExclusionsS RAVIPas encore d'évaluation
- Ec6504 MP Part ADocument13 pagesEc6504 MP Part ASudha PalaniPas encore d'évaluation
- EMU8086 TutorialDocument81 pagesEMU8086 TutorialGaurav Arora50% (4)
- Causal OutputDocument1 pageCausal OutputS RAVIPas encore d'évaluation
- Revathy NewDocument34 pagesRevathy NewS RAVIPas encore d'évaluation
- Microcontroller NotesDocument3 pagesMicrocontroller NotesSunny KumarPas encore d'évaluation
- MCQ1 DC Number Systems and CodesDocument6 pagesMCQ1 DC Number Systems and CodesarijitlgspPas encore d'évaluation
- 8086 MicroprocessorDocument8 pages8086 MicroprocessordiPas encore d'évaluation
- Loaders and LinkersDocument37 pagesLoaders and LinkersS RAVIPas encore d'évaluation
- EMU8086 TutorialDocument81 pagesEMU8086 TutorialGaurav Arora50% (4)
- 8051 Serial CommunicationDocument28 pages8051 Serial CommunicationDrWhoFPas encore d'évaluation
- MCQ2 DC Number Systems and CodesDocument6 pagesMCQ2 DC Number Systems and Codesayush guptaPas encore d'évaluation
- EMU8086 TutorialDocument81 pagesEMU8086 TutorialGaurav Arora50% (4)
- Microcontroller NotesDocument3 pagesMicrocontroller NotesSunny KumarPas encore d'évaluation
- Digital Electronics Sample Chapter PDFDocument106 pagesDigital Electronics Sample Chapter PDFRokiniKumarasamyPas encore d'évaluation
- MCQ1 DC Number Systems and CodesDocument6 pagesMCQ1 DC Number Systems and CodesarijitlgspPas encore d'évaluation
- QuerySurge Models Mappings DocumentDocument28 pagesQuerySurge Models Mappings Documentchiranjeev mishra100% (1)
- Manuscript PDFDocument50 pagesManuscript PDFMartina Mae Benig GinoPas encore d'évaluation
- Corregidor Title DefenseDocument16 pagesCorregidor Title DefenseJaydee ColadillaPas encore d'évaluation
- Growing Onion Management and Water NeedsDocument25 pagesGrowing Onion Management and Water NeedsKATE NAVAJAPas encore d'évaluation
- Enemies Beyond Character Creation SupplementDocument8 pagesEnemies Beyond Character Creation SupplementCain BlachartPas encore d'évaluation
- Fish Culture in Ponds: Extension Bulletin No. 103Document32 pagesFish Culture in Ponds: Extension Bulletin No. 103Bagas IndiantoPas encore d'évaluation
- Sinamics g120 BrochureDocument16 pagesSinamics g120 BrochuremihacraciunPas encore d'évaluation
- Harley Davidson U S Reportedly Uses Risk Sharing Agreements With Its Foreign SubsidiariesDocument1 pageHarley Davidson U S Reportedly Uses Risk Sharing Agreements With Its Foreign Subsidiariestrilocksp SinghPas encore d'évaluation
- Whitepaper ITES Industry PotentialDocument6 pagesWhitepaper ITES Industry PotentialsamuraiharryPas encore d'évaluation
- Eureka Math Grade 2 Module 3 Parent Tip Sheet 1Document2 pagesEureka Math Grade 2 Module 3 Parent Tip Sheet 1api-324573119Pas encore d'évaluation
- Yojananov 2021Document67 pagesYojananov 2021JackPas encore d'évaluation
- Planning Effective Advertising and Promotion Strategies For A Target AudienceDocument16 pagesPlanning Effective Advertising and Promotion Strategies For A Target Audiencebakhoo12Pas encore d'évaluation
- Basic Knowledge About WDM Principle ADocument92 pagesBasic Knowledge About WDM Principle AJosé LópezPas encore d'évaluation
- 3.2.1 The Role of Market Research and Methods UsedDocument42 pages3.2.1 The Role of Market Research and Methods Usedsana jaleelPas encore d'évaluation
- S O S Services Alert Level Help Sheet - REFERENCIALESDocument20 pagesS O S Services Alert Level Help Sheet - REFERENCIALESDavid Poma100% (1)
- Silapathikaram 3Document37 pagesSilapathikaram 3gavinilaaPas encore d'évaluation
- Menara PMB Assessment Criteria Score SummaryDocument2 pagesMenara PMB Assessment Criteria Score SummarySyerifaizal Hj. MustaphaPas encore d'évaluation
- Travelstart Ticket (ZA10477979) PDFDocument2 pagesTravelstart Ticket (ZA10477979) PDFMatthew PretoriusPas encore d'évaluation
- Elementary Electronics 1968-09-10Document108 pagesElementary Electronics 1968-09-10Jim ToewsPas encore d'évaluation
- SetupDocument4 pagesSetupRsam SamrPas encore d'évaluation
- Gifted Black Females Attending Predominantly White Schools Compressed 1 CompressedDocument488 pagesGifted Black Females Attending Predominantly White Schools Compressed 1 Compressedapi-718408484Pas encore d'évaluation
- Resolution: Owner/Operator, DocketedDocument4 pagesResolution: Owner/Operator, DocketedDonna Grace Guyo100% (1)
- 762id - Development of Cluster-7 Marginal Field Paper To PetrotechDocument2 pages762id - Development of Cluster-7 Marginal Field Paper To PetrotechSATRIOPas encore d'évaluation
- FT FocusDocument19 pagesFT Focusobi1kenobyPas encore d'évaluation
- Tylenol CrisisDocument2 pagesTylenol CrisisNida SweetPas encore d'évaluation
- Catalogue Laboratory Products - Heraeus KulzerDocument288 pagesCatalogue Laboratory Products - Heraeus KulzerDentaDentPas encore d'évaluation
- HUAWEI PowerCube 500Document41 pagesHUAWEI PowerCube 500soumen95Pas encore d'évaluation
- Industry and Community Project: Jacobs - Creating A Smart Systems Approach To Future Cities Project OutlineDocument14 pagesIndustry and Community Project: Jacobs - Creating A Smart Systems Approach To Future Cities Project OutlineCalebPas encore d'évaluation
- Session 1: Strategic Marketing - Introduction & ScopeDocument38 pagesSession 1: Strategic Marketing - Introduction & ScopeImrul Hasan ChowdhuryPas encore d'évaluation
- Space Saving, Tight AccessibilityDocument4 pagesSpace Saving, Tight AccessibilityTran HuyPas encore d'évaluation
- Chip War: The Quest to Dominate the World's Most Critical TechnologyD'EverandChip War: The Quest to Dominate the World's Most Critical TechnologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (227)
- Chip War: The Fight for the World's Most Critical TechnologyD'EverandChip War: The Fight for the World's Most Critical TechnologyÉvaluation : 4.5 sur 5 étoiles4.5/5 (82)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsD'EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsÉvaluation : 5 sur 5 étoiles5/5 (2)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102D'EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Évaluation : 5 sur 5 étoiles5/5 (2)
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsD'EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsPas encore d'évaluation
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)D'EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Évaluation : 5 sur 5 étoiles5/5 (1)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]D'EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Évaluation : 5 sur 5 étoiles5/5 (2)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)D'EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Évaluation : 5 sur 5 étoiles5/5 (2)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002D'EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Évaluation : 5 sur 5 étoiles5/5 (1)
- Windows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertD'EverandWindows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertÉvaluation : 3.5 sur 5 étoiles3.5/5 (6)
- How to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideD'EverandHow to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideÉvaluation : 1 sur 5 étoiles1/5 (1)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XD'EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XÉvaluation : 3 sur 5 étoiles3/5 (2)
- Amazon Web Services (AWS) Interview Questions and AnswersD'EverandAmazon Web Services (AWS) Interview Questions and AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Computer Science: A Concise IntroductionD'EverandComputer Science: A Concise IntroductionÉvaluation : 4.5 sur 5 étoiles4.5/5 (14)
- Mastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFD'EverandMastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFPas encore d'évaluation
- Raspberry Pi for Python Programmers Cookbook - Second EditionD'EverandRaspberry Pi for Python Programmers Cookbook - Second EditionPas encore d'évaluation
- Essential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XD'EverandEssential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XÉvaluation : 5 sur 5 étoiles5/5 (1)
- Amazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesD'EverandAmazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesPas encore d'évaluation
- Raspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesD'EverandRaspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesPas encore d'évaluation
- Real-Time UML Workshop for Embedded SystemsD'EverandReal-Time UML Workshop for Embedded SystemsÉvaluation : 3.5 sur 5 étoiles3.5/5 (2)