Vous aimerez peut-être aussi
- Mat Lab ManualDocument84 pagesMat Lab ManualÁnh Chuyên HoàngPas encore d'évaluation
- Implementation of High Speed FFT Core For Low Power Hardware Without Using ROM For Twiddle Factor StorageDocument3 pagesImplementation of High Speed FFT Core For Low Power Hardware Without Using ROM For Twiddle Factor StorageSathi Dinesh ReddyPas encore d'évaluation
- 5 SCALING + NAND, NOR For Nmos, Cmos, BicmosDocument59 pages5 SCALING + NAND, NOR For Nmos, Cmos, Bicmos7killers4uPas encore d'évaluation
- IRCTC - Time TableDocument1 pageIRCTC - Time TableSathi Dinesh ReddyPas encore d'évaluation
- Eee102 Xilinx Ide TutorialDocument14 pagesEee102 Xilinx Ide TutorialSathi Dinesh ReddyPas encore d'évaluation
- Us 5796094Document21 pagesUs 5796094Sathi Dinesh ReddyPas encore d'évaluation
- MT (Technical) Preliminary Written Test - 20 June, 2010 Forenoon (A Broad Outline)Document6 pagesMT (Technical) Preliminary Written Test - 20 June, 2010 Forenoon (A Broad Outline)Sathi Dinesh ReddyPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Labour UsageDocument5 pagesLabour Usageලහිරු විතානාච්චිPas encore d'évaluation
- HUAWEI Mini Speaker Gu A de Inicio R Pido (CM510,01, ES) PDFDocument284 pagesHUAWEI Mini Speaker Gu A de Inicio R Pido (CM510,01, ES) PDFToyPas encore d'évaluation
- CS210 DSA Lab 05Document9 pagesCS210 DSA Lab 05Shehzad AhmadPas encore d'évaluation
- Mobile Cylinder Div.: Quick Reference GuideDocument242 pagesMobile Cylinder Div.: Quick Reference GuideDiego PachePas encore d'évaluation
- ScholarshipDocument17 pagesScholarshipharindramehtaPas encore d'évaluation
- Ws 1800Document2 pagesWs 1800blanoswa11Pas encore d'évaluation
- AWS 110 WS Fatigue A10.1Document22 pagesAWS 110 WS Fatigue A10.1Richard Liu100% (1)
- 19 - K.van Helden - Towards Iso 17089-1Document58 pages19 - K.van Helden - Towards Iso 17089-1Bar AvaitPas encore d'évaluation
- General Structural Notes Structural Steel Framing Notes:: Site Prep For CT ScannerDocument14 pagesGeneral Structural Notes Structural Steel Framing Notes:: Site Prep For CT ScannerMark JangadPas encore d'évaluation
- 8051 Microcontroller: Chapter - 2Document58 pages8051 Microcontroller: Chapter - 2nebyuPas encore d'évaluation
- Newsletter Lesson Plan: Warm-UpDocument7 pagesNewsletter Lesson Plan: Warm-UpYara EmbabyPas encore d'évaluation
- Oracle SPARC Servers AssessmentDocument12 pagesOracle SPARC Servers AssessmentFazdlan FazPas encore d'évaluation
- 01-12 GPON Configuration Guide (Distributed Mode)Document13 pages01-12 GPON Configuration Guide (Distributed Mode)shantu123Pas encore d'évaluation
- Oracle DBA Job Interview Questions and AnswersDocument10 pagesOracle DBA Job Interview Questions and AnswersTryscribb NewPas encore d'évaluation
- Seminar On GPRS: Prepared byDocument14 pagesSeminar On GPRS: Prepared bySunil PillaiPas encore d'évaluation
- Cable Management For Solar Power: Integrated Grounding SolutionDocument4 pagesCable Management For Solar Power: Integrated Grounding SolutionZasfaried RafsanzaniPas encore d'évaluation
- Bike TyresDocument22 pagesBike Tyreshari kumarPas encore d'évaluation
- CoVE - Projects - 2023 - Ver 06Document26 pagesCoVE - Projects - 2023 - Ver 06tazmania82Pas encore d'évaluation
- Week 35Document3 pagesWeek 35Ankit GuptaPas encore d'évaluation
- Two Types of Mechanical Designs and Programming Methods for PLC SystemsDocument1 pageTwo Types of Mechanical Designs and Programming Methods for PLC SystemsKiruba EathirajPas encore d'évaluation
- Pc78us-8 PDFDocument6 pagesPc78us-8 PDFadi078Pas encore d'évaluation
- Valve Interview Questions and AnswersDocument7 pagesValve Interview Questions and AnswersQasim Iqbal100% (1)
- BIM Ex PlanDocument40 pagesBIM Ex PlancoidoianhPas encore d'évaluation
- General InformationDocument4 pagesGeneral InformationKratika AroraPas encore d'évaluation
- Baltimore County Inspector General's Report On Councilman Julian Jones' EmailsDocument35 pagesBaltimore County Inspector General's Report On Councilman Julian Jones' EmailsFern MariePas encore d'évaluation
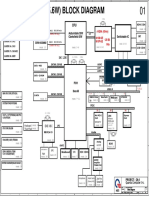
- Quanta QL4Document44 pagesQuanta QL4Robson ZimmermannPas encore d'évaluation
- MVP Scope and SequenceDocument28 pagesMVP Scope and SequenceMadhavi VangipurapuPas encore d'évaluation
- Procurement Data Clerk - Supply ChainDocument2 pagesProcurement Data Clerk - Supply ChainFatmata BanguraPas encore d'évaluation
- Keeping Safe On The InternetDocument2 pagesKeeping Safe On The InternetMostafa MahmoudPas encore d'évaluation
- COMPUTER SCIENCE PRACTICAL EXERCISES 2022-23Document39 pagesCOMPUTER SCIENCE PRACTICAL EXERCISES 2022-23Bhoomi GoelPas encore d'évaluation