Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Fans and Blowers PapstDocument108 pagesFans and Blowers PapstvitoPas encore d'évaluation
- Germanium Power TransistorDocument4 pagesGermanium Power TransistorvitoPas encore d'évaluation
- Large Scale MimoDocument23 pagesLarge Scale MimocloogisPas encore d'évaluation
- Thermal SwitchesDocument10 pagesThermal SwitchesvitoPas encore d'évaluation
- Stmicro LCD Backlight ADocument24 pagesStmicro LCD Backlight AAndres Alegria100% (2)
- 1 PB PDFDocument5 pages1 PB PDFvitoPas encore d'évaluation
- 2016 MTR RTandi 614ME1002 AcousticDocument115 pages2016 MTR RTandi 614ME1002 AcousticvitoPas encore d'évaluation
- 1990 Fujitsu Linear Products Data Book PDFDocument870 pages1990 Fujitsu Linear Products Data Book PDFvitoPas encore d'évaluation
- ) 1972 GE SCR Manual 5ed PDFDocument712 pages) 1972 GE SCR Manual 5ed PDFabrap_dPas encore d'évaluation
- Propeller Excitation of Longitudinal Vibration ChaDocument20 pagesPropeller Excitation of Longitudinal Vibration ChavitoPas encore d'évaluation
- Beam-Controlled Spectral-Selective Architecture With PlanarDocument11 pagesBeam-Controlled Spectral-Selective Architecture With PlanarvitoPas encore d'évaluation
- A Multilayer Emitter Close To Ideal Solar Reflectance PDFDocument10 pagesA Multilayer Emitter Close To Ideal Solar Reflectance PDFvitoPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Induction motor-UNIT-IVDocument23 pagesInduction motor-UNIT-IVVaibhav SanPas encore d'évaluation
- Induction Motor Steady-State Model (Squirrel Cage) : MEP 1422 Electric DrivesDocument21 pagesInduction Motor Steady-State Model (Squirrel Cage) : MEP 1422 Electric DrivesSpoiala DragosPas encore d'évaluation
- Brushless DC Electric Motor PDFDocument6 pagesBrushless DC Electric Motor PDFAsif MudgalPas encore d'évaluation
- Double Cage RotorsDocument17 pagesDouble Cage RotorsweirdwolfvortexPas encore d'évaluation
- Chapter 5 - Induction MotorDocument26 pagesChapter 5 - Induction MotorarifulPas encore d'évaluation
- MOCatalogDocument156 pagesMOCatalogFranCanavPas encore d'évaluation
- EX 2 Brushless DC Motor 1600073824807Document23 pagesEX 2 Brushless DC Motor 1600073824807kewalPas encore d'évaluation
- 17 - Pret Piese LinhaiDocument52 pages17 - Pret Piese LinhaiSebastian FlorescuPas encore d'évaluation
- ModelDocument2 pagesModelAnbalagan GuruPas encore d'évaluation
- Rewinding of Single Phase Induction MotorsDocument2 pagesRewinding of Single Phase Induction Motors2023seee004Pas encore d'évaluation
- Ac Motor Research PaperDocument4 pagesAc Motor Research Paperfvgcaatd100% (1)
- Buchla Ch05 Res LectureDocument40 pagesBuchla Ch05 Res LectureTafwPas encore d'évaluation
- Magnetic Resonance Imaging: Physical PrinciplesDocument35 pagesMagnetic Resonance Imaging: Physical PrinciplesBERVIN KINGSPas encore d'évaluation
- Speed Control of Induction Motors: Synchronous Speed Ns 120 F/PDocument6 pagesSpeed Control of Induction Motors: Synchronous Speed Ns 120 F/Pmohamed shalabyPas encore d'évaluation
- Questions & Answers On Synchronous Machine StabilityDocument20 pagesQuestions & Answers On Synchronous Machine Stabilitykibrom atsbha50% (2)
- Unit V Em2Document4 pagesUnit V Em2anbuelectricalPas encore d'évaluation
- Applimotion UTO Motor Kits DatasheetDocument2 pagesApplimotion UTO Motor Kits DatasheetElectromatePas encore d'évaluation
- Z5 DC Compound Wound MotorDocument13 pagesZ5 DC Compound Wound MotorFitri VongolaPas encore d'évaluation
- MSP430 Motor Controller ApplicationsDocument24 pagesMSP430 Motor Controller ApplicationsDhinesh PeriyasamyPas encore d'évaluation
- EM2 (5TH) May19Document1 pageEM2 (5TH) May19Arun SharmaPas encore d'évaluation
- Flux Reversal Permanent Magnet Machines With Single-Layer Non-Overlapping Windings PDFDocument9 pagesFlux Reversal Permanent Magnet Machines With Single-Layer Non-Overlapping Windings PDFMuhammad HumzaPas encore d'évaluation
- Generator Testing Manual For Rotor & ExciterDocument20 pagesGenerator Testing Manual For Rotor & ExciterRakesh KumarPas encore d'évaluation
- Electromechanical Energy Conversion II: Dr. Ali M. EltamalyDocument43 pagesElectromechanical Energy Conversion II: Dr. Ali M. EltamalyYacine BendjeddouPas encore d'évaluation
- DCMotorsDocument19 pagesDCMotorsAndrew BuckleyPas encore d'évaluation
- Electrical Machine Drives: Dr. Arsalan ArifDocument10 pagesElectrical Machine Drives: Dr. Arsalan ArifFaraz AhmadPas encore d'évaluation
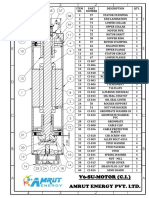
- Amrut Energy Pvt. Ltd. V6-SU-MOTOR (C.I.) V6-SU-MOTOR (C.I.)Document1 pageAmrut Energy Pvt. Ltd. V6-SU-MOTOR (C.I.) V6-SU-MOTOR (C.I.)IMTB MumbaiPas encore d'évaluation
- Induction Machine NotesDocument242 pagesInduction Machine NotesJason HughPas encore d'évaluation
- A Low Field, Low Cost Halbach Magnet Array For Open Access NMRDocument4 pagesA Low Field, Low Cost Halbach Magnet Array For Open Access NMRaresnickety100% (3)
- DC Motor Part IIIDocument26 pagesDC Motor Part IIIMohd YasirPas encore d'évaluation
- Name of Old Component Name of Substitute Component: NotesDocument3 pagesName of Old Component Name of Substitute Component: Notessrinitce_mePas encore d'évaluation